Υποστηρίζει την τοποθέτηση πολλαπλών συσκευών στο δίαυλο (ένας κύριος και πολλαπλοί slaves, πολλαπλοί κύριοι και πολλαπλοί slaves)
Ένας κύριος, πολλαπλοί σκλάβοι: Ο μικροελεγκτής χρησιμεύει ως κεντρικός υπολογιστής και κυριαρχεί στη λειτουργία του διαύλου I2C Όλες οι εξωτερικές μονάδες που είναι τοποθετημένες στο δίαυλο I2C είναι υποτελείς χωρίς άδεια διαύλου I2C για την αποφυγή συγκρούσεων.
Multi-master και multi-slave: Οποιαδήποτε μονάδα στο λεωφορείο μπορεί ενεργά να πηδήξει και να λειτουργήσει ως κύριος. Όταν συμβαίνει μια σύγκρουση διαύλου, το πρωτόκολλο I2C θα διεξάγει διαιτησία.
1.2 Κύκλωμα υλικού
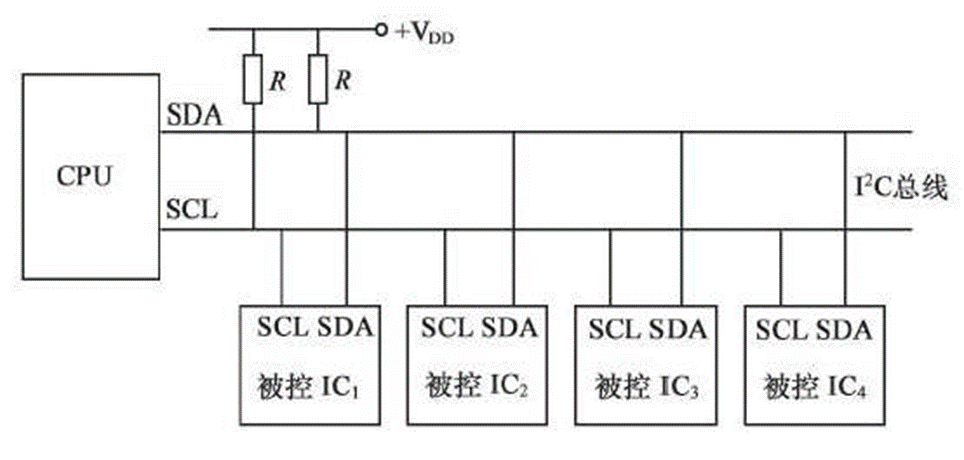
Το SCL όλων των συσκευών I2C είναι συνδεδεμένο μαζί και το SDA είναι συνδεδεμένο μαζί.
Τόσο το SCL όσο και το SDA της συσκευής πρέπει να ρυθμιστούν σε λειτουργία εξόδου ανοιχτής αποστράγγισης.
Προσθέστε μια pull-up αντίσταση σε καθένα από τα SCL και SDA, η τιμή αντίστασης είναι γενικά περίπου 4,7KΩ
Ένας κύριος και πολλαπλοί εξαρτημένοι υπολογιστές: Η CPU είναι ένας μικροϋπολογιστής με ένα τσιπ, ως κύριος του διαύλου, ο κύριος έχει τον πλήρη έλεγχο της γραμμής SCL ανά πάσα στιγμή. Επιπλέον, στην κατάσταση αδράνειας, ο κεντρικός υπολογιστής μπορεί να ξεκινήσει ενεργά τον έλεγχο του SDA Μόνο όταν ο εξαρτημένος διακομιστής αποκρίνεται, ο κεντρικός υπολογιστής θα μεταφέρει τον έλεγχο του SDA στον εξαρτημένο υπολογιστή.
Το ελεγχόμενο IC είναι ένα slave τοποθετημένο στο δίαυλο I2C, το οποίο μπορεί να είναι αισθητήρας στάσης, OLED, μνήμη, μονάδα ρολογιού κ.λπ. Η ισχύς του εξαρτήματος είναι σχετικά μικρή Για τη γραμμή ρολογιού SCL, δεν επιτρέπεται να ελέγχει τη γραμμή SCL μόνο παθητικά. Για τη γραμμή δεδομένων SDA, η υποτελής δεν επιτρέπεται να εκκινήσει ενεργά τον έλεγχο της SDA. Μόνο αφού ο κύριος στείλει μια εντολή για ανάγνωση του slave ή όταν ο slave αποκριθεί, μπορεί ο slave να αποκτήσει για λίγο τον έλεγχο του SDA.
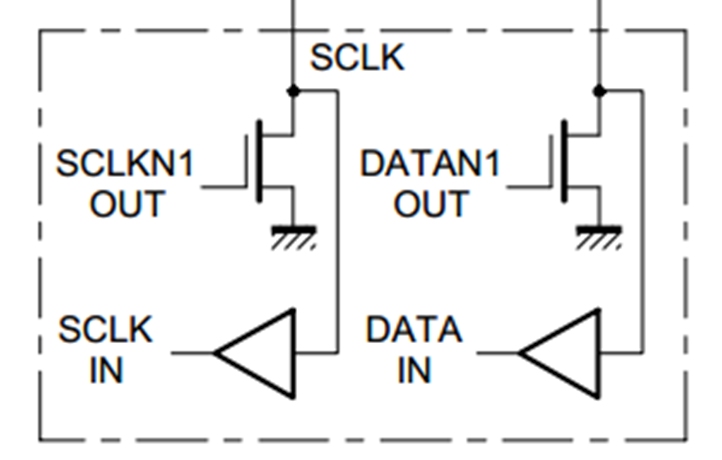
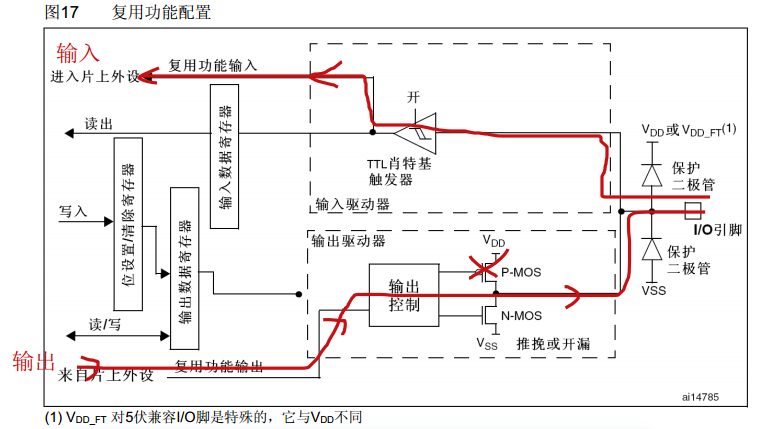
Εικόνα 2: SCL στα αριστερά και SDA στα δεξιά. Όλα τα δεδομένα μπορούν να εισαχθούν μέσω προσωρινής αποθήκευσης δεδομένων ή σκανδάλης Schmitt.
Επειδή η είσοδος δεν έχει καμία επίδραση στο κύκλωμα, οποιαδήποτε συσκευή μπορεί να έχει είσοδο ανά πάσα στιγμή.
Η έξοδος χρησιμοποιεί μια διαμόρφωση εξόδου ανοιχτής αποστράγγισης Όταν η έξοδος είναι χαμηλή, ο διακόπτης είναι ενεργοποιημένος και ο πείρος είναι απευθείας συνδεδεμένος με τη γείωση, κάτι που είναι ένα ισχυρό pull-down όταν η έξοδος είναι υψηλή, ο διακόπτης είναι απενεργοποιημένος δεν είναι συνδεδεμένο με τίποτα και είναι σε κατάσταση αιώρησης, έτσι ώστε όλες οι συσκευές να μπορούν να εξάγουν μόνο χαμηλή στάθμη αλλά όχι υψηλή στάθμη Προκειμένου να αποφευχθεί η αιώρηση που προκαλείται από την υψηλή στάθμη, το SCL και το SDA πρέπει να διαθέτουν εξωτερική αντίσταση έλξης. το λεωφορείο, μέσω μιας αντίστασης Τραβιέται σε υψηλό επίπεδο, επομένως είναι αδύναμο έλξη. Με αυτόν τον τρόπο, πρώτον, εξαλείφει τελείως το φαινόμενο του βραχυκυκλώματος και εξασφαλίζει την ασφάλεια του κυκλώματος, δεύτερον, αποφεύγει τη συχνή εναλλαγή των τρόπων ακίδων. Στη λειτουργία ανοιχτής αποστράγγισης, η έξοδος υψηλής στάθμης ισοδυναμεί με την αποσύνδεση της ακίδας, ώστε να μπορείτε να εξάγετε απευθείας ένα υψηλό επίπεδο πριν από την είσοδο. Τρίτον, αυτή η λειτουργία έχει ένα φαινόμενο "ενσύρματο ΚΑΙ" Εφόσον μία ή περισσότερες συσκευές εξάγουν χαμηλό επίπεδο, ο δίαυλος είναι σε χαμηλό επίπεδο. . Επομένως, το I2C μπορεί να εκμεταλλευτεί αυτό το φαινόμενο για να εκτελέσει συγχρονισμό ρολογιού και διαιτησία διαύλου σε λειτουργία πολλαπλού κύριου. Έτσι, παρόλο που το SCL εδώ μπορεί να χρησιμοποιήσει έξοδο push-pull σε μία λειτουργία κύριας και πολλαπλών υποτελών, εξακολουθεί να χρησιμοποιεί τη λειτουργία εξόδου ανοιχτής αποστράγγισης συν pull-out.
1.3 Βασική μονάδα χρονισμού I2C
1.3.1 Συνθήκες έναρξης και συνθήκες λήξης
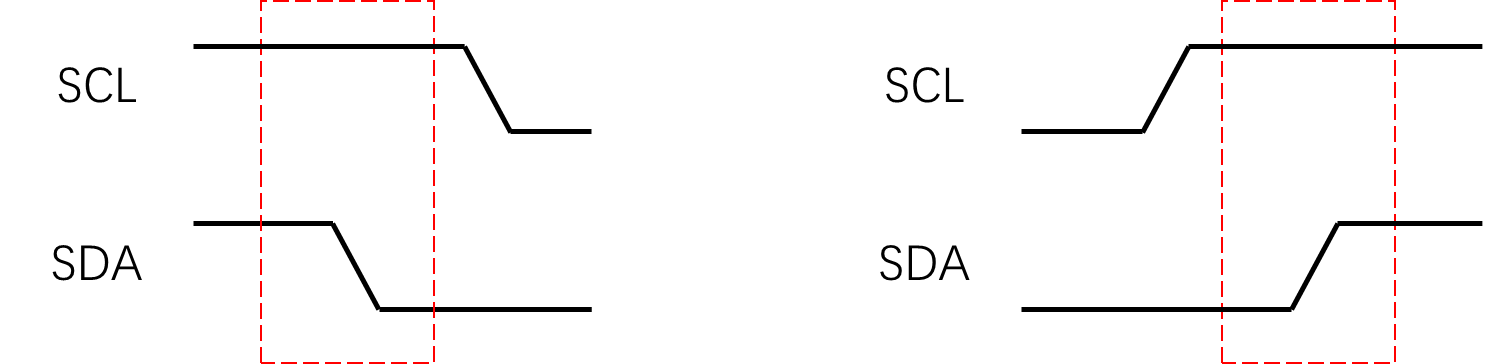
κατάσταση εκκίνησης: Κατά το υψηλό επίπεδο SCL, το SDA αλλάζει από υψηλό επίπεδο σε χαμηλό επίπεδο
Προϋπόθεση τερματισμού: Κατά τη διάρκεια του υψηλού επιπέδου SCL, το SDA αλλάζει από χαμηλό επίπεδο σε υψηλό επίπεδο
υπό αρχικές συνθήκες : Όταν ο δίαυλος I2C βρίσκεται σε κατάσταση αδράνειας, τόσο το SCL όσο και το SDA βρίσκονται σε κατάσταση υψηλού επιπέδου, δηλαδή, καμία συσκευή δεν αγγίζει το SCL και το SCL και το SDA έλκονται σε υψηλό επίπεδο από εξωτερικές αντιστάσεις έλξης και ο δίαυλος είναι σε ήσυχη κατάσταση. Όταν ο κεντρικός υπολογιστής χρειάζεται να στείλει και να λάβει δεδομένα, πρέπει πρώτα να σπάσει τη σιωπή του διαύλου και να δημιουργήσει μια συνθήκη εκκίνησης, δηλαδή το SCL να βρίσκεται σε υψηλό επίπεδο χωρίς να το αγγίξει και, στη συνέχεια, να τραβήξει το SDA προς τα κάτω για να δημιουργήσει μια πτώση. Όταν το slave καταγράψει το υψηλό επίπεδο SCL και το σήμα πτώσης του SDA, θα επαναρυθμιστεί και θα περιμένει την κλήση του master. Μετά την πτώση του SDA, ο κεντρικός υπολογιστής πρέπει να τραβήξει ξανά προς τα κάτω το SCL. Θα διασφαλιστεί αργότερα ότι, εκτός από τις συνθήκες έναρξης και διακοπής, το SCL κάθε διαδοχικής μονάδας ξεκινά με χαμηλό επίπεδο και τελειώνει με χαμηλό επίπεδο.
Στην κατάσταση τερματισμού : Το SCL αφήνει πρώτα και ριμπάουντ στο υψηλό επίπεδο, μετά το SDA αφήνει να πάει και αναπηδά στο υψηλό επίπεδο, δημιουργώντας ένα ανερχόμενο πλεονέκτημα, το οποίο ενεργοποιεί τη συνθήκη τερματισμού. Μετά την ταυτόχρονη συνθήκη τερματισμού, τόσο το SCL όσο και το SDA είναι υψηλά και επιστρέφουν στην αρχική κατάσταση ηρεμίας. Η έναρξη και η διακοπή δημιουργούνται από τον κεντρικό υπολογιστή και η υποτελής δεν επιτρέπεται να δημιουργήσει έναρξη και διακοπή. Επομένως, όταν το λεωφορείο είναι αδρανές, ο σκλάβος πρέπει πάντα να αφήνει τα χέρια του και δεν επιτρέπεται να πηδήξει έξω και να αγγίξει το λεωφορείο.
1.3.2 Στείλτε ένα byte
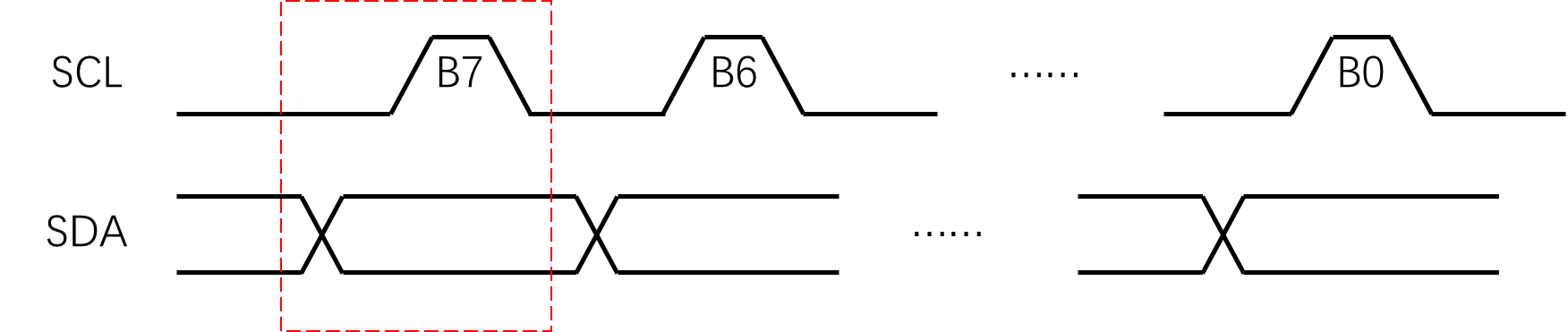
Στείλτε ένα byte: Κατά τη διάρκεια του χαμηλού επιπέδου του SCL, ο κεντρικός υπολογιστής τοποθετεί τα bit δεδομένων στη γραμμή SDA στη σειρά (υψηλό bit πρώτα) και στη συνέχεια απελευθερώνει το SCL Το slave θα διαβάσει τα bit δεδομένων κατά το υψηλό επίπεδο του SCL, επομένως το SDA δεν επιτρέπεται για να έχετε δεδομένα κατά τη διάρκεια του υψηλού επιπέδου SCL Όταν αλλάζουν τα δεδομένα, κυκλώστε την παραπάνω διαδικασία 8 φορές για να στείλετε ένα byte.
Ο κεντρικός υπολογιστής χαμηλού επιπέδου τοποθετεί δεδομένα και ο υποτελής υψηλού επιπέδου διαβάζει δεδομένα. Μετά τη συνθήκη έναρξης, το πρώτο byte πρέπει επίσης να σταλεί από τον κεντρικό υπολογιστή. Όταν το SCL είναι χαμηλό, αν ο κεντρικός υπολογιστής θέλει να στείλει 0, τραβάει το SDA χαμηλά εάν θέλει να στείλει το 1, αφήνει να πάει και το SDA επανέρχεται σε υψηλό επίπεδο. Κατά τη διάρκεια του χαμηλού επιπέδου του SCL, το επίπεδο του SDA επιτρέπεται να αλλάξει Μετά την τοποθέτηση των δεδομένων, ο κεντρικός υπολογιστής απελευθερώνει τη γραμμή του ρολογιού και το SCL επανέρχεται στο υψηλό επίπεδο. Κατά τη διάρκεια του υψηλού επιπέδου, είναι η ώρα που ο slave διαβάζει SDA, επομένως κατά το υψηλό επίπεδο, το SDA δεν επιτρέπεται να αλλάξει. Αφού το SCL βρίσκεται σε υψηλό επίπεδο, η υποτελής πρέπει να διαβάσει το SDA όσο το δυνατόν πιο γρήγορα. Επειδή το ρολόι ελέγχεται από τον κύριο, το slave δεν γνωρίζει πότε συμβαίνει η πτώση της ακμής, επομένως ο slave θα διαβάσει τα δεδομένα στην ανερχόμενη άκρη του SCL. Αφού ο κεντρικός υπολογιστής αφήσει το SCL για κάποιο χρονικό διάστημα, μπορεί να συνεχίσει να τραβάει το SCL χαμηλά και να μεταδίδει το επόμενο bit. Ο κεντρικός υπολογιστής πρέπει επίσης να τοποθετήσει δεδομένα στο SDA το συντομότερο δυνατό μετά την πτώση του SCL. Αλλά ο κεντρικός υπολογιστής έχει τον έλεγχο του ρολογιού, επομένως χρειάζεται μόνο να τοποθετήσει δεδομένα στο SDA οποιαδήποτε στιγμή όταν το χαμηλό επίπεδο είναι χαμηλό. Μετά την απελευθέρωση των δεδομένων, ο κεντρικός υπολογιστής απελευθερώνει ξανά το SCL, το SCL είναι υψηλό και το slave διαβάζει αυτό το bit. Επαναλάβετε αυτή τη διαδικασία: ο κεντρικός υπολογιστής τραβάει το SCL χαμηλά, τοποθετεί τα δεδομένα στο SDA, ο κεντρικός υπολογιστής απελευθερώνει το SCL και ο slave διαβάζει δεδομένα SDA. Κάτω από το συγχρονισμό του SCL, ο κύριος εκπέμπει και το slave λαμβάνει διαδοχικά Μετά από 8 κύκλους, αποστέλλονται δεδομένα 8 bit, που είναι ένα byte. Δεδομένου ότι είναι πρώτα bit υψηλής τάξης, το πρώτο bit είναι το υψηλότερο bit B7 ενός byte και το χαμηλότερο bit B0 αποστέλλεται τελευταίο.
1.3.3 Λήψη byte
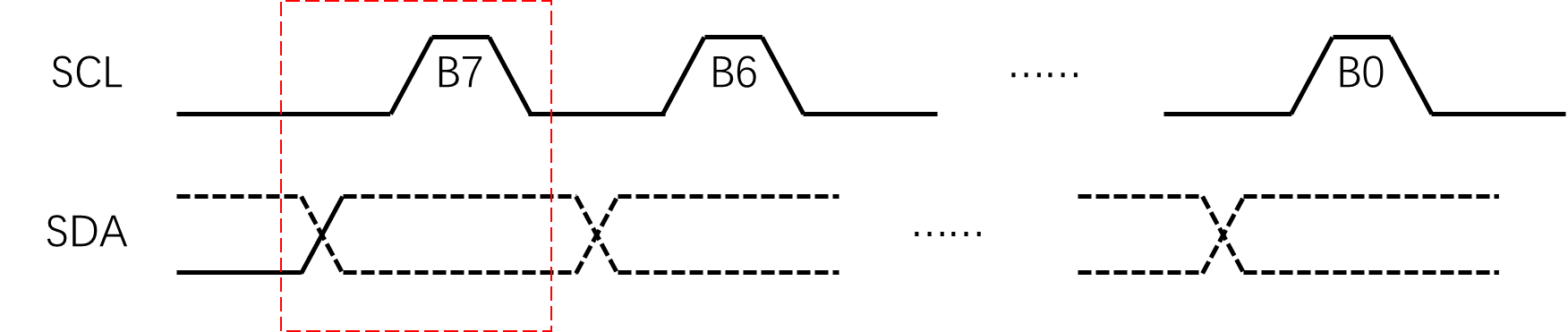
λάβετε ένα byte: Κατά τη διάρκεια του χαμηλού επιπέδου SCL, η υποτελής μονάδα τοποθετεί τα bit δεδομένων στη γραμμή SDA στη σειρά (υψηλό bit πρώτα) και στη συνέχεια απελευθερώνει το SCL Ο κεντρικός υπολογιστής θα διαβάσει τα bit δεδομένων κατά τη διάρκεια του υψηλού επιπέδου SCL, επομένως το SDA δεν επιτρέπεται για να έχετε δεδομένα κατά τη διάρκεια του υψηλού επιπέδου SCL Όταν αλλάζουν τα δεδομένα, κυκλώστε την παραπάνω διαδικασία 8 φορές για να λάβετε ένα byte (ο κεντρικός υπολογιστής πρέπει να απελευθερώσει το SDA πριν λάβει).
Το slave χαμηλού επιπέδου βάζει δεδομένα, ο κεντρικός υπολογιστής υψηλού επιπέδου διαβάζει δεδομένα Γραμμή SDA: Η κύρια μονάδα πρέπει να απελευθερώσει το SDA πριν από τη λήψη, η υποτελής μονάδα αποκτά τον έλεγχο του SDA, θα τραβάει το SDA χαμηλά ριμπάουντ σε υψηλό επίπεδο. Το χαμηλό επίπεδο μετατρέπει δεδομένα, το υψηλό επίπεδο διαβάζει δεδομένα. Η συμπαγής γραμμή αντιπροσωπεύει το επίπεδο που ελέγχεται από τον κύριο και η διακεκομμένη γραμμή αντιπροσωπεύει το επίπεδο που ελέγχεται από τον υποτελή. Το SCL ελέγχεται από τον κεντρικό υπολογιστή καθ' όλη τη διάρκεια της διαδικασίας και ο κεντρικός υπολογιστής SDA πρέπει να απελευθερωθεί πριν από την παραλαβή και να παραδοθεί στον slave για έλεγχο. Επειδή το ρολόι SCL ελέγχεται από τον κεντρικό υπολογιστή, η μετατροπή δεδομένων του slave πραγματοποιείται βασικά στην πτώση του SCL και ο κεντρικός υπολογιστής μπορεί να διαβάσει οποιαδήποτε στιγμή όταν το SCL είναι υψηλό.
1.3.4 Αποστολή απάντησης και λήψη απάντησης
Αποστολή απάντησης: Μετά τη λήψη ενός byte, ο κεντρικός υπολογιστής στέλνει ένα bit δεδομένων στο επόμενο ρολόι.
λάβετε απάντηση: Αφού ο κεντρικός υπολογιστής στείλει ένα byte, λαμβάνει ένα bit δεδομένων στο επόμενο ρολόι για να προσδιορίσει εάν το slave ανταποκρίνεται.
Δηλαδή, μετά την κλήση του χρονισμού αποστολής ενός byte, θα πρέπει να ακολουθείται από το χρονοδιάγραμμα κλήσης της απόκρισης λήψης, που χρησιμοποιείται για να προσδιοριστεί εάν ο slave έχει λάβει τα δεδομένα που μόλις του δόθηκαν. Εάν το λάβετε το slave, τότε στο bit απόκρισης, όταν το master απελευθερώσει το SDA, το slave θα πρέπει να τραβήξει αμέσως το SDA προς τα κάτω και, στη συνέχεια, κατά τη διάρκεια του υψηλού επιπέδου SCL, ο κεντρικός υπολογιστής διαβάζει το bit απόκρισης. Εάν το bit απόκρισης είναι 0, σημαίνει ότι το slave το έχει όντως λάβει. Όταν λαμβάνετε ένα byte, πρέπει να καλέσετε την απάντηση αποστολής. Ο σκοπός της αποστολής μιας απάντησης είναι να πείτε στον δούλο εάν θέλετε να συνεχίσετε την αποστολή. Εάν η εξαρτημένη μηχανή λάβει μια απάντηση από την κύρια μηχανή μετά την αποστολή ενός κομματιού δεδομένων, η υποτελής μηχανή θα συνεχίσει να στέλνει εάν η εξαρτημένη μηχανή δεν λάβει απάντηση από την κύρια μηχανή, η υποτελής μηχανή θα σκεφτεί ότι ένα τμήμα δεδομένων έχει. έχει σταλεί, αλλά η κύρια μηχανή με αγνοεί.
1.4 Χρονισμός I2C
1.4.1 Καθορίστε τη διεύθυνση για εγγραφή
Καθορίστε τη διεύθυνση για εγγραφή
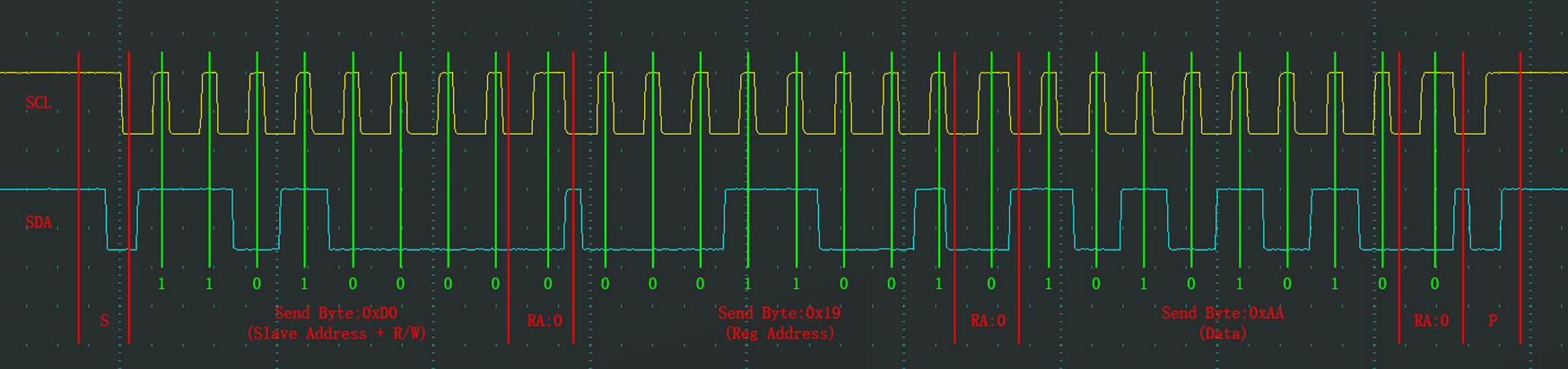
Για την καθορισμένη συσκευή (Slave Address), γράψτε τα καθορισμένα δεδομένα (Data) στην καθορισμένη διεύθυνση (Reg Address) (δηλαδή τη διεύθυνση μητρώου της καθορισμένης συσκευής)
επεξεργάζομαι, διαδικασία: (1) Συνθήκες εκκίνησης (2) Χρόνος αποστολής ενός byte—0xD0 (υποτελής διεύθυνση (7bit) + εγγραφή (1bit)-0) (1101 0000) (3) Λήψη απόκρισης: RA = 0 (λήψη απόκρισης από την υποτελή) (4) Καθορισμένη διεύθυνση: 0x19 (0001 1001) (5) Λήψη απόκρισης: RA = 0 (λήψη απόκρισης από την υποτελή) (6) Γράψτε τα καθορισμένα δεδομένα: 0xAA (1010 1010) (7) Λήψη απάντησης: RA = 0 (8) Stop bit P (συνθήκη τερματισμού)
Μετά τη συνθήκη έναρξης, πρέπει να είναι ο χρόνος αποστολής ενός byte. Το περιεχόμενο του byte πρέπει να είναι η υποτελής διεύθυνση + bit ανάγνωσης και εγγραφής 8 bit. Η αποστολή της υποτελούς διεύθυνσης είναι για τον προσδιορισμό του αντικειμένου επικοινωνίας και η αποστολή του bit ανάγνωσης και εγγραφής είναι για να επιβεβαιώσετε εάν θα γράψετε ή θα διαβάσετε στη συνέχεια. Τώρα ο κεντρικός υπολογιστής στέλνει ένα κομμάτι δεδομένων. Το περιεχόμενο του byte μετατρέπεται σε δεκαεξαδικό. Το μπιτ εγγραφής τελειώνει και το SCL τραβιέται χαμηλά Μετά από αυτό, ο κεντρικός υπολογιστής πρέπει να απελευθερώσει το SDA, ακολουθούμενο από το bit επιβεβαίωσης RA.
Το υψηλό επίπεδο μετά το τέλος του bit απόκρισης RA δημιουργείται από το slave που απελευθερώνει τον έλεγχο του SDA Επειδή ο slave θέλει να ανταλλάξει δεδομένα το συντομότερο δυνατό στο χαμηλό επίπεδο του SDA και του SDA. η πτώση του SCL συνέβη σχεδόν ταυτόχρονα.
Αφού ολοκληρωθεί η απόκριση, εάν συνεχίσετε να στέλνετε ένα byte, το δεύτερο byte μπορεί να σταλεί στο εσωτερικό της καθορισμένης συσκευής. Γενικά, το δεύτερο byte μπορεί να είναι μια διεύθυνση μητρώου ή μια λέξη ελέγχου εντολών, κ.λπ., και το τρίτο byte είναι το περιεχόμενο που θέλει να γράψει ο κεντρικός υπολογιστής στη διεύθυνση καταχωρητή (δεύτερο byte).
Το P είναι το bit διακοπής.
Ο σκοπός αυτού του πλαισίου δεδομένων είναι: για τη συσκευή που καθορίζει την υποτελή διεύθυνση 1101000, γράψτε τα δεδομένα 0xAA στον εσωτερικό της καταχωρητή στη διεύθυνση 0x19. 0 σημαίνει: ο κεντρικός υπολογιστής θα εκτελέσει μια λειτουργία εγγραφής στον επόμενο χρονισμό. 1 σημαίνει: ο κεντρικός υπολογιστής θα εκτελέσει μια λειτουργία ανάγνωσης στην επόμενη ακολουθία χρονισμού.
1.4.2 Ανάγνωση τρέχουσας διεύθυνσης
Διαβάστηκε η τρέχουσα διεύθυνση
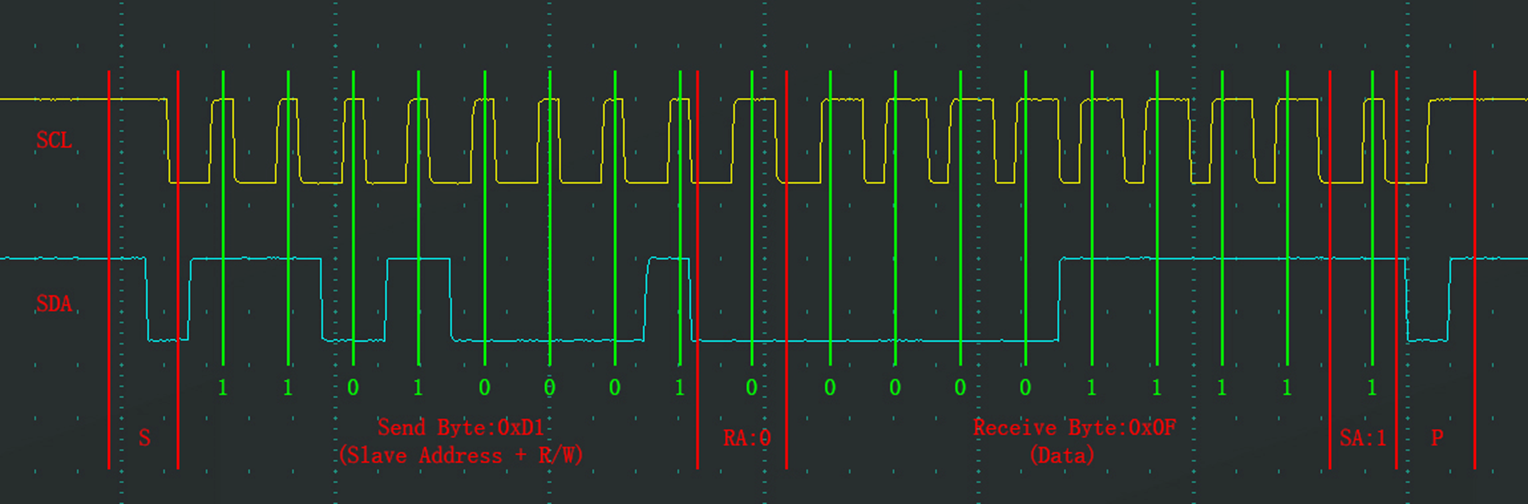
Για την καθορισμένη συσκευή (Slave Address), διαβάστε τα υποτελή δεδομένα (Data) στη διεύθυνση που υποδεικνύεται από τον τρέχοντα δείκτη διεύθυνσης.
επεξεργάζομαι, διαδικασία: (1) Συνθήκες εκκίνησης (2) Χρόνος αποστολής ενός byte—0xD1 (slave address (7bit) + read (1bit)-1) (1101 0001) (3) Λήψη απόκρισης: RA = 0 (λήψη απόκρισης από την υποτελή) (4) Ανάγνωση υποτελών δεδομένων: 0x0F (0000 1111) (7) Αποστολή απάντησης: SA = 0 (8) Stop bit P (συνθήκη τερματισμού)
Το bit ανάγνωσης και εγγραφής είναι 1, υποδεικνύοντας ότι πρόκειται να εκτελεστεί η επόμενη λειτουργία ανάγνωσης. Αφού αποκριθεί η υποτελής μονάδα (RA=0), η κατεύθυνση μετάδοσης δεδομένων θα αντιστραφεί. Ο κύριος θέλει να παραδώσει τον έλεγχο του SDA στο slave και ο κύριος καλεί το χρόνο λήψης ενός byte για να εκτελέσει τη λειτουργία λήψης.
Στο δεύτερο byte, το slave λαμβάνει άδεια από τον master και μπορεί να γράψει στο SCL κατά τη διάρκεια του υψηλού επιπέδου του SCL 8 bit, λαμβάνεται ένα byte δεδομένων που αποστέλλεται από το slave, το οποίο είναι 0x0F. Ποιος καταχωρητής όμως του slave είναι 0x0F; Στον χρονισμό ανάγνωσης, το πρωτόκολλο I2C ορίζει ότι όταν ο κεντρικός υπολογιστής διευθυνσιοδοτεί, μόλις η σημαία ανάγνωσης και εγγραφής οριστεί σε 1. Το επόμενο byte θα αλλάξει αμέσως σε χρονισμό ανάγνωσης. Επομένως, ο κεντρικός υπολογιστής θα αρχίσει να λαμβάνει πριν προλάβει να καθορίσει ποιο μητρώο θέλει να διαβάσει, επομένως δεν υπάρχει σύνδεσμος για να καθορίσετε τη διεύθυνση εδώ. Στη δευτερεύουσα μηχανή, όλοι οι καταχωρητές εκχωρούνται σε μια γραμμική περιοχή και θα υπάρχει μια ξεχωριστή μεταβλητή δείκτη που υποδεικνύει έναν από τους καταχωρητές Μετά την ανάγνωση ενός byte, ο δείκτης θα αυξηθεί αυτόματα μία φορά και θα μετακινηθεί στην επόμενη θέση. Στη συνέχεια, κατά την κλήση του χρόνου ανάγνωσης της τρέχουσας διεύθυνσης, εάν ο κεντρικός υπολογιστής δεν καθορίσει ποια διεύθυνση θα διαβάσει, ο υποτελής θα επιστρέψει στον καταχωρητή που επισημαίνεται από το. τρέχουσα τιμή.
1.4.3 Ανάγνωση σε καθορισμένη διεύθυνση
Καθορίστε τη διεύθυνση προς ανάγνωση
Για την καθορισμένη συσκευή (Slave Address), κάτω από την καθορισμένη διεύθυνση (Reg Address), διαβάστε τα υποτελή δεδομένα (Data)
Ξεκινήστε πρώτα, μετά επαναλάβετε την έναρξη και μετά σταματήστε επεξεργάζομαι, διαδικασία: (1) Συνθήκες εκκίνησης (2) Χρόνος αποστολής ενός byte—0xD0 (υποτελής διεύθυνση (7bit) + εγγραφή (1bit)-0) (1101 0000) (3) Λήψη απόκρισης: RA = 0 (λήψη απόκρισης από την υποτελή) (4) Καθορισμένη διεύθυνση: 0x19 (0001 1001) (5) Λήψη απόκρισης: RA = 0 (λήψη απόκρισης από την υποτελή) (6) Επαναλάβετε την αρχική συνθήκη (7) Χρόνος αποστολής ενός byte—0xD1 (slave address (7bit) + read (1bit)-1) (1101 0001) (8) Λήψη απάντησης: RA = 0 (9) Ανάγνωση υποτελών δεδομένων: 0xAA (1010 1010) (10) Αποστολή απάντησης: SA = 0 (11) Stop bit P (συνθήκη τερματισμού)
Το πρώτο μέρος είναι να γράψετε στην καθορισμένη διεύθυνση, αλλά καθορίζεται μόνο η διεύθυνση και δεν υπάρχει χρόνος για να γράψετε το δεύτερο μέρος είναι να διαβάσετε την τρέχουσα διεύθυνση, επειδή η διεύθυνση έχει μόλις καθοριστεί, επομένως η τρέχουσα διεύθυνση είναι ανάγνωση ξανακάλεσε.
Η καθορισμένη υποτελής διεύθυνση είναι 1101000, η σημαία ανάγνωσης-εγγραφής είναι 0, και η λειτουργία εγγραφής εκτελείται μετά την απόκριση του εξαρτήματος, γράφεται ένα άλλο byte (το δεύτερο byte) για να καθοριστεί η διεύθυνση δείκτης διεύθυνσης, δηλαδή, αφού η υποτελής μονάδα λάβει τα δεδομένα, ο δείκτης καταχωρητή της δείχνει στη θέση 0x19.
Το Sr είναι μια επαναλαμβανόμενη συνθήκη έναρξης, η οποία ισοδυναμεί με την έναρξη ενός νέου χρονισμού Επειδή η καθορισμένη σημαία ανάγνωσης και εγγραφής μπορεί να ακολουθεί μόνο το πρώτο byte της συνθήκης έναρξης, επομένως, εάν θέλετε να αλλάξετε την κατεύθυνση ανάγνωσης και εγγραφής, μπορείτε μόνο να έχετε. άλλη συνθήκη εκκίνησης.
Στη συνέχεια, μετά τη συνθήκη έναρξης, επαναδιευθυνθείτε και καθορίστε το bit σημαίας ανάγνωσης-εγγραφής Αυτή τη στιγμή, το bit σημαίας ανάγνωσης-εγγραφής είναι 1, υποδεικνύοντας ότι πρόκειται να διαβαστεί. Στη συνέχεια, ο κεντρικός υπολογιστής λαμβάνει ένα byte 0xAA στη διεύθυνση 0x19.
2. MPU6050
2.1 Εισαγωγή στο MPU6050
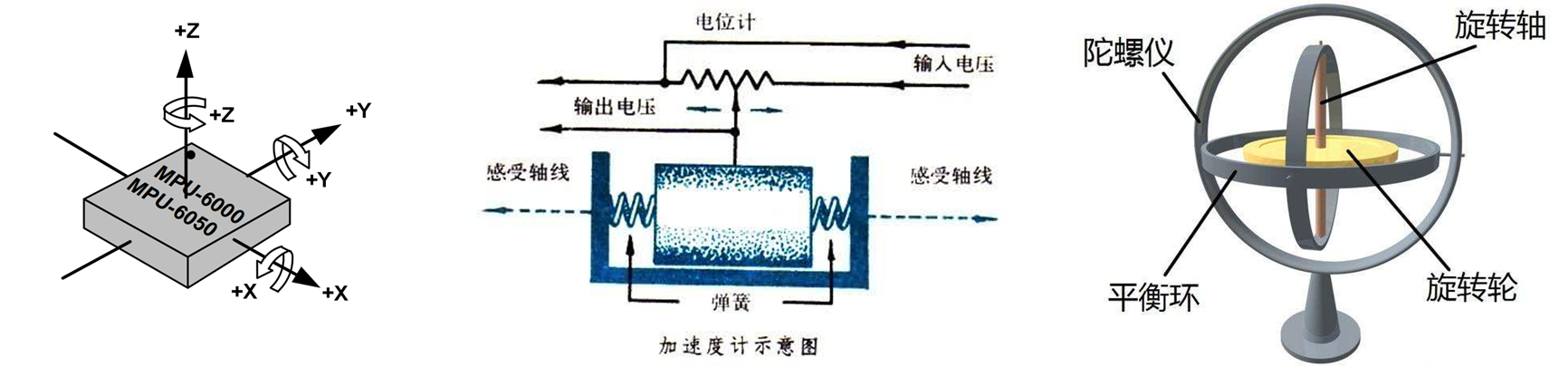
Το MPU6050 είναι ένας αισθητήρας στάσης 6 αξόνων που μπορεί να μετρήσει τις παραμέτρους της επιτάχυνσης και της γωνιακής ταχύτητας των αξόνων X, Y και Z του τσιπ Μέσω της σύντηξης δεδομένων, η γωνία στάσης (γωνία Euler) χρησιμοποιείται συχνά εξισορρόπηση οχημάτων, αεροσκαφών κ.λπ. που πρέπει να ανιχνεύσουν τον εαυτό τους
Επιταχυνσιόμετρο 3 αξόνων (Accelerometer): μετρά την επιτάχυνση των αξόνων X, Y και Z
Γυροσκοπικός αισθητήρας 3 αξόνων (Γυροσκόπιο): μετρά τη γωνιακή ταχύτητα των αξόνων X, Y και Z
Λαμβάνοντας ως παράδειγμα την άτρακτο του αεροσκάφους, η γωνία Euler είναι η γωνία μεταξύ της ατράκτου του αεροσκάφους και των αρχικών τριών αξόνων.
αεροπλάνοΗ μύτη του αεροσκάφους γέρνει προς τα κάτω ή προς τα πάνω, ονομάζεται η γωνία μεταξύ αυτού του άξοναΠίσσα;
αεροπλάνοΗ άτρακτος κυλά αριστερά ή δεξιά, ονομάζεται η γωνία μεταξύ αυτού του άξοναΡολό;
αεροπλάνοΔιατηρήστε το επίπεδο της ατράκτου,Γυρίστε τη μύτη του αεροσκάφους προς τα αριστερά ή προς τα δεξιά, ονομάζεται η γωνία μεταξύ αυτού του άξοναΕκτρέπομαι της οδού。
Η γωνία Euler αντιπροσωπεύει τη στάση του αεροσκάφους αυτή τη στιγμή, είτε έχει κλίση προς τα πάνω ή προς τα κάτω, είτε έχει κλίση προς τα αριστερά ή προς τα δεξιά.
Οι κοινοί αλγόριθμοι σύντηξης δεδομένων περιλαμβάνουν γενικά το συμπληρωματικό φιλτράρισμα, το φιλτράρισμα Kalman, κ.λπ., και τον υπολογισμό στάσης στην αδρανειακή πλοήγηση.
Επιταχυνσιόμετρο : Η διακεκομμένη γραμμή στη μέση είναι ο άξονας επαγωγής Στη μέση υπάρχει ένα μικρό ρυθμιστικό με μια συγκεκριμένη μάζα που μπορεί να γλιστρήσει αριστερά και δεξιά. Όταν το ρυθμιστικό κινείται, θα οδηγήσει το ποτενσιόμετρο σε αυτό για να κινηθεί. Αυτό το επιταχυνσιόμετρο είναι στην πραγματικότητα ένα δυναμόμετρο ελατηρίου. Υπάρχει ένα επιταχυνσιόμετρο σε κάθε έναν από τους άξονες X, Y και Z. Τα επιταχυνσιόμετρα έχουν στατική σταθερότητα αλλά όχι δυναμική σταθερότητα.
Γυροσκοπικός αισθητήρας : Στη μέση είναι ένας περιστρεφόμενος τροχός με μια ορισμένη μάζα Όταν ο περιστρεφόμενος τροχός περιστρέφεται με υψηλή ταχύτητα, σύμφωνα με την αρχή της διατήρησης της γωνιακής ορμής, ο περιστρεφόμενος τροχός έχει την τάση να διατηρεί την αρχική του γωνιακή ορμή κατεύθυνση του άξονα περιστροφής αμετάβλητη. Όταν η κατεύθυνση του εξωτερικού αντικειμένου περιστρέφεται, η κατεύθυνση του εσωτερικού άξονα περιστροφής δεν θα περιστρέφεται, γεγονός που θα δημιουργήσει μια γωνιακή απόκλιση στη σύνδεση του δακτυλίου ισορροπίας. Εάν βάλετε ένα περιστρεφόμενο ποτενσιόμετρο στη σύνδεση και μετρήσετε την τάση του ποτενσιόμετρου, μπορείτε να πάρετε τη γωνία περιστροφής. Το γυροσκόπιο θα πρέπει να μπορεί να λαμβάνει απευθείας τη γωνία, αλλά το γυροσκόπιο αυτού του MPU6050 δεν μπορεί να μετρήσει απευθείας τη γωνία, δηλαδή τη γωνιακή ταχύτητα του τσιπ που περιστρέφεται γύρω από τον άξονα Χ, τον άξονα Υ και τον άξονα Z. -άξονας. Το ολοκλήρωμα της γωνιακής ταχύτητας είναι η γωνία Ωστόσο, όταν το αντικείμενο είναι ακίνητο, η τιμή της γωνιακής ταχύτητας δεν μπορεί να επιστραφεί πλήρως στο μηδέν λόγω του θορύβου. που είναι η γωνία που προκύπτει με την ολοκλήρωση της γωνιακής ταχύτητας Δεν μπορεί να αντέξει τη δοκιμασία του χρόνου, αλλά αυτή η γωνία δεν αποτελεί πρόβλημα είτε είναι ακίνητη είτε κινούμενη, και δεν επηρεάζεται από την κίνηση του αντικειμένου. Τα γυροσκόπια έχουν δυναμική σταθερότητα, όχι στατική σταθερότητα.
Σύμφωνα με το επιταχυνσιόμετρο, το οποίο έχει στατική σταθερότητα αλλά δεν έχει δυναμική σταθερότητα, αλλά δεν έχει στατική ευστάθεια, ώστε να μπορούμε να μάθουμε ο ένας από τα δυνατά σημεία του άλλου και να συμπληρώσουμε τις αδυναμίες του άλλου , μπορούμε να ενσωματώσουμε και στατική και δυναμική σταθερότητα Η στάση είναι άβολη.
2.2 παράμετροι MPU6050
Το ADC 16 bit συλλέγει το αναλογικό σήμα του αισθητήρα, εύρος κβαντισμού: -32768~32767
Επιλογή πλήρους κλίμακας γυροσκοπίου: ±250, ±500, ±1000, ±2000 (°/sec, βαθμός/δευτερόλεπτο, μονάδα γωνιακής ταχύτητας, πόσες μοίρες περιστροφής ανά δευτερόλεπτο) (όσο μεγαλύτερη είναι η επιλογή πλήρους κλίμακας, τόσο ευρύτερη είναι η εύρος μέτρησης Όσο μικρότερο είναι το εύρος πλήρους κλίμακας, τόσο μεγαλύτερη θα είναι η ανάλυση της μέτρησης)
Ρυθμιζόμενο ψηφιακό χαμηλοπερατό φίλτρο: Ένας καταχωρητής μπορεί να διαμορφωθεί για να επιλέγει το χαμηλοπερατό φιλτράρισμα των δεδομένων εξόδου.
Ρυθμιζόμενη πηγή ρολογιού
Ρυθμιζόμενη διαίρεση συχνότητας δειγματοληψίας: Η πηγή ρολογιού μπορεί να διαιρεθεί με το διαιρέτη συχνότητας για να παρέχει ρολόγια για μετατροπή AD και άλλα εσωτερικά κυκλώματα. Με τον έλεγχο του συντελεστή διαίρεσης συχνότητας, μπορείτε να ελέγξετε την ταχύτητα της μετατροπής AD.
Διεύθυνση υποτελούς υπηρεσίας I2C: 1101000 (AD0=0) ή 1101001 (AD0=1)
Το 110 1000 μετατρέπεται σε δεκαεξαδικό, το οποίο είναι 0x68, επομένως κάποιοι λένε ότι η υποτελής διεύθυνση του MPU6050 είναι 0x68. Αλλά στην επικοινωνία I2C, τα υψηλά 7 bit του πρώτου byte είναι η υποτελής διεύθυνση και το χαμηλότερο bit είναι το bit ανάγνωσης και εγγραφής. Επομένως, εάν νομίζετε ότι το 0x68 είναι η υποτελής διεύθυνση, κατά την αποστολή του πρώτου byte, πρέπει πρώτα να αλλάξετε. 0x68 Μετατόπιση αριστερά κατά 1 bit (0x68 << 1), στη συνέχεια ανάγνωση και εγγραφή bit κατά bit ή προς τα επάνω, ανάγνωση 1 και εγγραφή 0.
Μια άλλη μέθοδος είναι η μετατόπιση των δεδομένων του 0x68 προς τα αριστερά κατά 1 bit (0x68 << 1) ως υποτελής διεύθυνση, η οποία είναι 0xD0, σε αυτήν την περίπτωση, η υποτελής διεύθυνση του MPU6050 είναι 0xD0. Αυτή τη στιγμή, κατά την αποστολή του πρώτου byte, εάν θέλετε να γράψετε, χρησιμοποιήστε απλώς 0xD0 ως πρώτο byte, χρησιμοποιήστε 0xD0 ή 0x01 (0xD0 | 0x01), δηλαδή 0xD1 . Αυτή η αναπαράσταση δεν απαιτεί λειτουργία μετατόπισης προς τα αριστερά, ή με άλλα λόγια, αυτή η αναπαράσταση ενσωματώνει τα bit ανάγνωσης και εγγραφής στη διεύθυνση εξαρτημένης λειτουργίας. 0xD0 είναι η διεύθυνση εγγραφής και 0xD1 είναι η διεύθυνση ανάγνωσης.
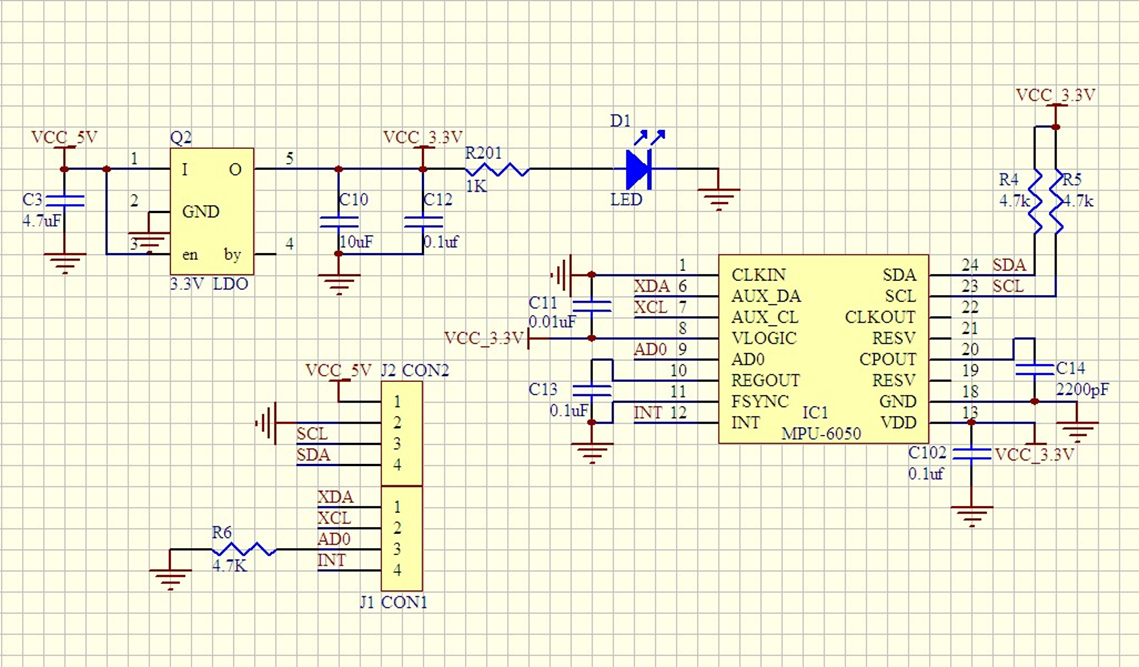
2.3 Κύκλωμα υλικού
καρφίτσα
Λειτουργία
VCC, GND
παροχή ηλεκτρικού ρεύματος
SCL, SDA
Καρφίτσα επικοινωνίας I2C
XCL, XDA
Υποδοχή ακίδων επικοινωνίας I2C
μ.Χ.0
Το χαμηλότερο bit της υποτελούς διεύθυνσης
INT
Έξοδος σήματος διακοπής
LDO: γραμμικός ρυθμιστής τάσης χαμηλής πτώσης, ρυθμιστής τάσης 3,3 V.
SCL και SDA: Είναι ακροδέκτες επικοινωνίας I2C Η μονάδα έχει ενσωματωμένες αντιστάσεις έλξης 4,7K, επομένως κατά την καλωδίωση, απλώς συνδέστε το SDA και το SCL απευθείας στη θύρα GPIO .
XCL, XDA: Host I2C pins επικοινωνίας Αυτές οι δύο ακίδες έχουν σχεδιαστεί για να επεκτείνουν τις λειτουργίες του chip. Συνήθως χρησιμοποιείται για εξωτερικά μαγνητόμετρα ή βαρόμετρα Όταν αυτά τα τσιπ επέκτασης είναι συνδεδεμένα, η διεπαφή κεντρικού υπολογιστή του MPU6050 μπορεί να έχει άμεση πρόσβαση στα δεδομένα αυτών των τσιπ επέκτασης στο MPU6050 υπολογισμός στάσης. AD0 pin: Είναι το χαμηλότερο bit της εξαρτημένης διεύθυνσης, εάν είναι συνδεδεμένη σε χαμηλό επίπεδο, η δευτερεύουσα διεύθυνση 7 bit είναι 1101000, εάν είναι συνδεδεμένη σε υψηλό επίπεδο, η δευτερεύουσα διεύθυνση 7 bit είναι 1101001. Υπάρχει μια αντίσταση στο διάγραμμα κυκλώματος, η οποία είναι ασθενώς κατεβασμένη σε χαμηλή στάθμη από προεπιλογή, οπότε αν η ακίδα αφεθεί να επιπλέει, είναι χαμηλή στάθμη Εάν θέλετε να τη συνδέσετε σε υψηλή στάθμη, μπορείτε να οδηγήσετε απευθείας το AD0 στο VCC και τραβήξτε το δυνατά σε υψηλό επίπεδο.
INT: Διακοπή της ακίδας εξόδου Μπορείτε να διαμορφώσετε ορισμένα συμβάντα μέσα στο τσιπ ώστε να ενεργοποιούν την έξοδο της ακίδας διακοπής, όπως είναι τα δεδομένα ετοιμότητας, το σφάλμα κεντρικού υπολογιστή I2C, κ.λπ.
Το τσιπ έχει επίσης ενσωματωμένο: ανίχνευση ελεύθερης πτώσης, ανίχνευση κίνησης, ανίχνευση μηδενικής κίνησης κ.λπ. Αυτά τα σήματα μπορούν να ενεργοποιήσουν τον ακροδέκτη INT για να δημιουργήσουν μια μετάβαση επιπέδου και τα σήματα διακοπής μπορούν να διαμορφωθούν εάν είναι απαραίτητο.
Το τροφοδοτικό του τσιπ MPU6050 είναι 2.375-3.46V, το οποίο είναι μια συσκευή τροφοδοσίας 3.3V και δεν μπορεί να συνδεθεί απευθείας σε 5V. Επομένως, προστίθεται ένας ρυθμιστής τάσης 3,3 V και η τάση του ακροδέκτη εισόδου VCC_5V μπορεί να είναι μεταξύ 3,3 V και 5 V, στη συνέχεια, ο ρυθμιστής τάσης 3,3 V εξάγει σταθερή τάση 3,3 V για να τροφοδοτήσει το τσιπ , Η ενδεικτική λυχνία λειτουργίας θα ανάψει.
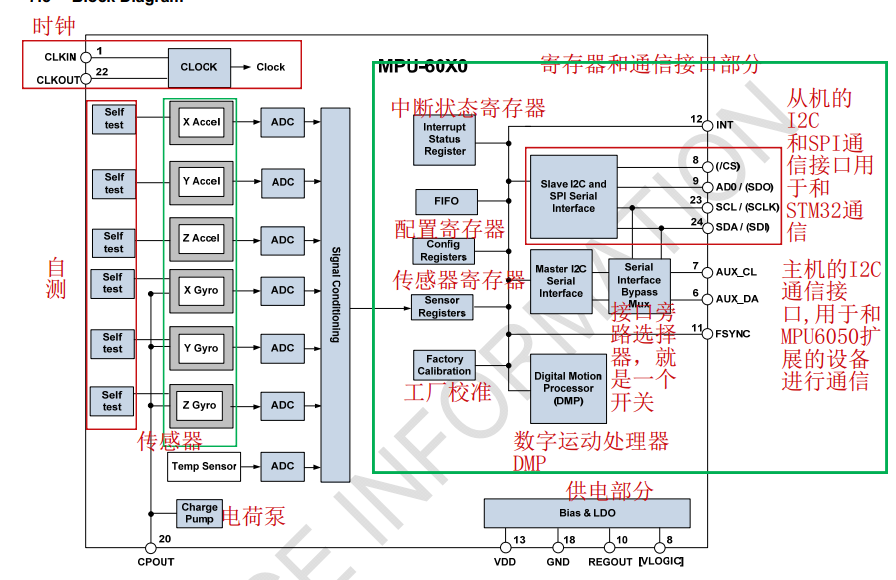
2.4 Μπλοκ διάγραμμα MPU6050
Το CLKIN και το CLKOUT είναι ακίδες εισόδου ρολογιού και ακροδέκτες εξόδου ρολογιού, αλλά γενικά χρησιμοποιούμε το εσωτερικό ρολόι.
Το γκρι μέρος: είναι ο αισθητήρας μέσα στο τσιπ, το επιταχυνσιόμετρο στον άξονα XYZ και το γυροσκόπιο στον άξονα XYZ.
Υπάρχει επίσης ένας ενσωματωμένος αισθητήρας θερμοκρασίας που μπορεί να χρησιμοποιηθεί για τη μέτρηση της θερμοκρασίας.
Αυτοί οι αισθητήρες είναι ουσιαστικά ισοδύναμοι με μεταβλητές αντιστάσεις Μετά τη διαίρεση της τάσης, εξάγουν μια αναλογική τάση και στη συνέχεια εκτελούν μετατροπή αναλογικού σε ψηφιακό μέσω του ADC. Αφού ολοκληρωθεί η μετατροπή, τα δεδομένα από αυτούς τους αισθητήρες τοποθετούνται ομοιόμορφα στα δεδομένα καταχωρητή, η οποία μπορεί να ληφθεί με την ανάγνωση του καταχωρητή δεδομένων Η τιμή που μετράται από τον αισθητήρα. Όλες οι μετατροπές σε αυτό το τσιπ είναι πλήρως αυτοματοποιημένες.
Κάθε αισθητήρας έχει μια μονάδα αυτοελέγχου, η οποία χρησιμοποιείται για την επαλήθευση της ποιότητας του τσιπ Όταν ξεκινήσει ο αυτοέλεγχος, το τσιπ θα προσομοιώσει μια εξωτερική δύναμη που ασκείται στον αισθητήρα μεγαλύτερο από το συνηθισμένο. Διαδικασία αυτοδιαγνωστικού ελέγχου: Μπορείτε να ενεργοποιήσετε πρώτα τον αυτοέλεγχο, να διαβάσετε τα δεδομένα, μετά να ενεργοποιήσετε τον αυτοέλεγχο, να διαβάσετε τα δεδομένα, να αφαιρέσετε τα δύο δεδομένα και τα δεδομένα που προκύπτουν ονομάζονται απόκριση αυτοδιαγνωστικού ελέγχου. Για αυτήν την απόκριση αυτοελέγχου, το εγχειρίδιο δίνει ένα εύρος τιμών, αυτό σημαίνει ότι δεν υπάρχει πρόβλημα με το τσιπ.
Αντλία φόρτισης: Είναι αντλία φόρτισης ή αντλία φόρτισης.
Ο ακροδέκτης CPOUT απαιτεί εξωτερικό πυκνωτή.
Καταχωρητής κατάστασης διακοπής: μπορεί να ελέγξει ποια εσωτερικά συμβάντα εξάγονται στον ακροδέκτη διακοπής,
FIFO: First-in-first-out καταχωρητής, ο οποίος μπορεί να αποθηκεύσει προσωρινά τη ροή δεδομένων.
Καταχωρητής διαμόρφωσης: Μπορείτε να διαμορφώσετε διάφορα εσωτερικά κυκλώματα
Καταχωρητής αισθητήρα: Καταχωρητής δεδομένων, ο οποίος αποθηκεύει τα δεδομένα κάθε αισθητήρα.
Factory Calibrated: Αυτό σημαίνει ότι οι αισθητήρες στο εσωτερικό είναι βαθμονομημένοι.
Ψηφιακός επεξεργαστής κίνησης: DMP για συντομία, είναι ένας αλγόριθμος υλικού για τον υπολογισμό της στάσης που βρίσκεται μέσα στο τσιπ. Μπορεί να χρησιμοποιηθεί για τον υπολογισμό της στάσης με την επίσημη βιβλιοθήκη DMP.
FSYNC: Συγχρονισμός καρέ.
3. 10-1 Λογισμικό I2C ανάγνωσης και γραφής MPU6050
3.1 Σύνδεση υλικού
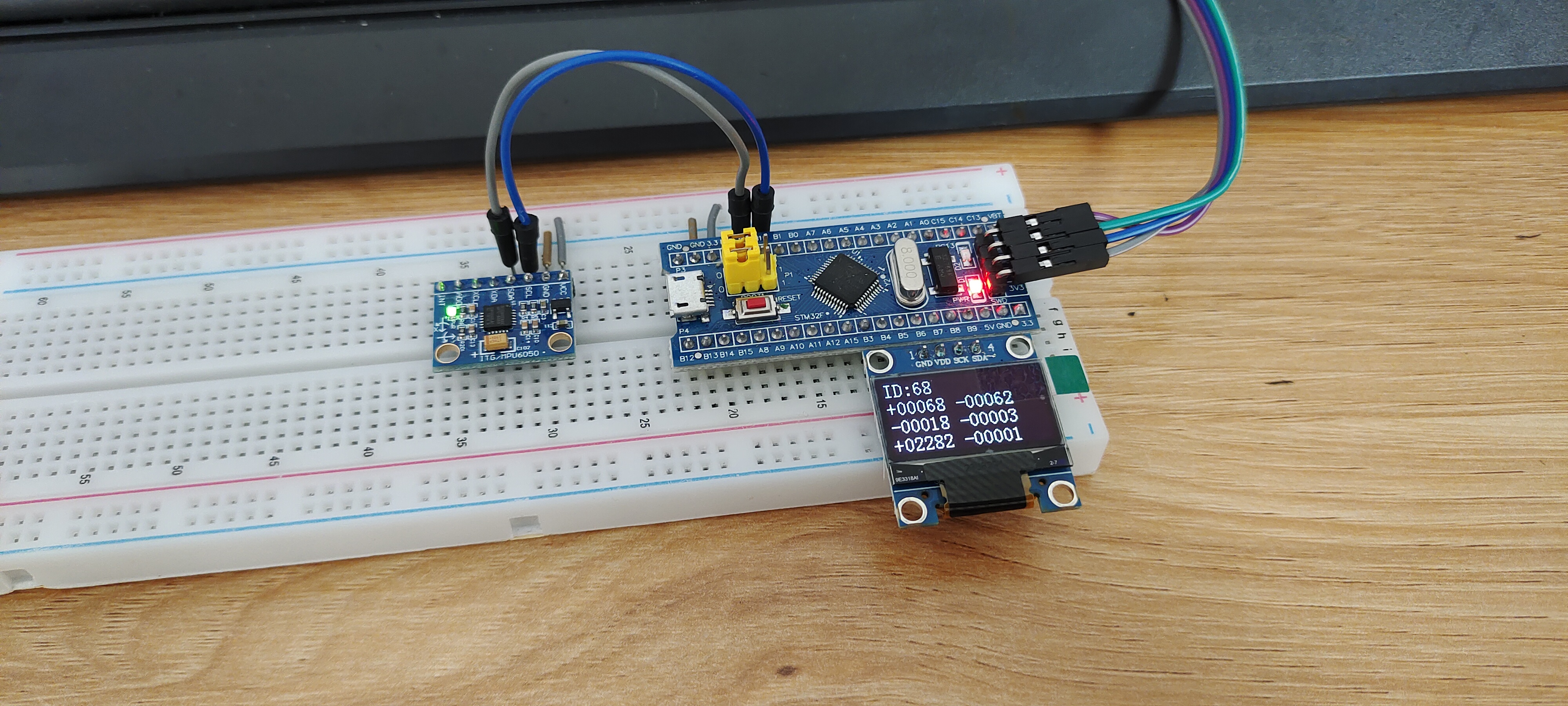
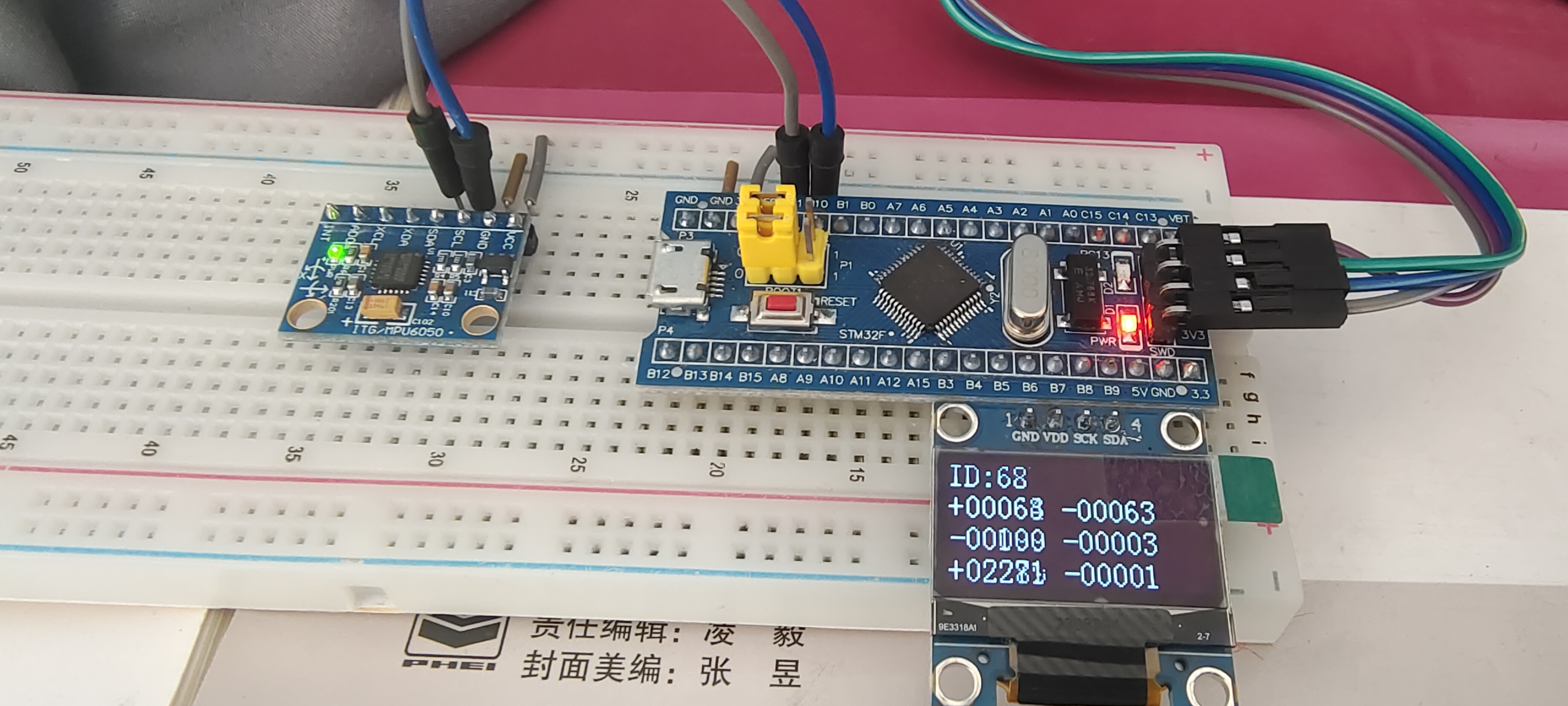
Μέσω της επικοινωνίας του λογισμικού I2C, διαβάστε και γράψτε τους καταχωρητές μέσα στο τσιπ MPU6050 Εγγράφοντας στον καταχωρητή διαμόρφωσης, μπορείτε να ρυθμίσετε τις παραμέτρους της μονάδας προσθήκης Διαβάζοντας το μητρώο δεδομένων Τα δεδομένα ανάγνωσης θα εμφανιστούν σε OLED, τα κορυφαία δεδομένα είναι ο αριθμός ID της συσκευής. Παρακάτω, τα τρία στα αριστερά είναι τα δεδομένα εξόδου του αισθητήρα επιτάχυνσης, τα οποία είναι η επιτάχυνση του άξονα X, του άξονα Y και του άξονα Z αντίστοιχα. που είναι η γωνιακή ταχύτητα του άξονα Χ, του άξονα Υ και του άξονα Ζ. Το SCL συνδέεται με τον ακροδέκτη PB10 του STM32 και το SDA συνδέεται στον ακροδέκτη PB11. Δεδομένου ότι η αναστροφή επιπέδου λογισμικού εφαρμόζεται εδώ, δύο θύρες GPIO μπορούν να συνδεθούν κατά βούληση.
3.2 Αποτελέσματα λειτουργίας
3.3 Ροή κώδικα
Το STM32 είναι ο κεντρικός υπολογιστής και το MPU6050 είναι το slave, το οποίο είναι μια λειτουργία master-slave.
Δημιουργήστε τις μονάδες .c και .h του επιπέδου επικοινωνίας I2C
Βασισμένο στη μονάδα επικοινωνίας I2C, υλοποιεί την ανάγνωση στην καθορισμένη διεύθυνση, την εγγραφή στην καθορισμένη διεύθυνση, την εγγραφή καταχωρητών για τη διαμόρφωση του τσιπ και την ανάγνωση των καταχωρητών για τη λήψη δεδομένων αισθητήρα.
κύρια.γ
Καλέστε τη μονάδα MPU6050, αρχικοποιήστε, λάβετε τα δεδομένα και εμφανίστε τα δεδομένα
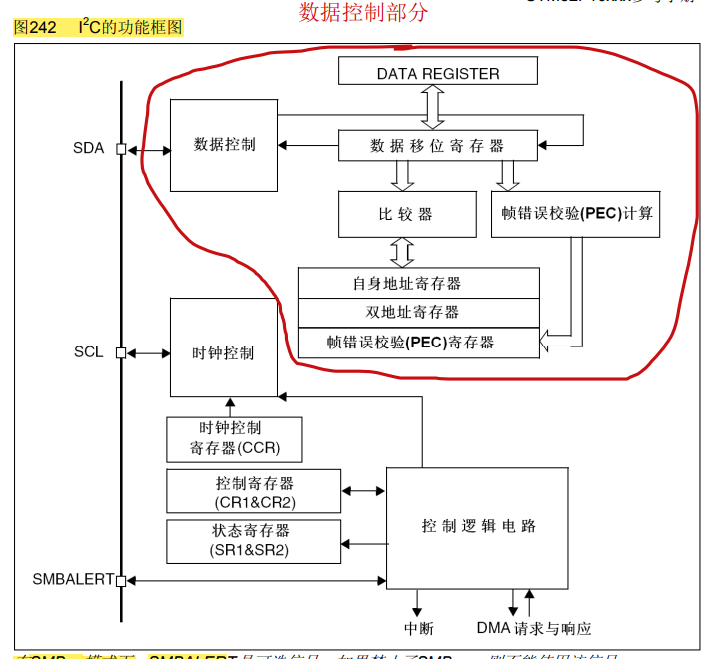
Το STM32 ενσωματώνει ένα κύκλωμα πομποδέκτη I2C υλικού, το οποίο μπορεί να εκτελέσει αυτόματα λειτουργίες όπως δημιουργία ρολογιού, δημιουργία κατάστασης έναρξης και λήξης, μετάδοση και λήψη bit απόκρισης και μετάδοση και λήψη δεδομένων από το υλικό, μειώνοντας την επιβάρυνση της CPU.
Στα αριστερά υπάρχουν οι ακίδες επικοινωνίας: Το SDA και το SCL χρησιμοποιούνται από το SMBus. Οι ακίδες που προέρχονται από γενικά περιφερειακά συνήθως συνδέονται με τον έξω κόσμο μέσω της λειτουργίας πολυπλεξίας της θύρας GPIO (δείτε τον πίνακα)
Το παραπάνω είναι το τμήμα ελέγχου δεδομένων: SDA Το βασικό μέρος της μετάδοσης και λήψης δεδομένων είναι ο καταχωρητής δεδομένων DR (DATA REGISTER) και ο καταχωρητής μετατόπισης δεδομένων. Όταν πρέπει να σταλούν δεδομένα, ένα byte δεδομένων μπορεί να εγγραφεί στον καταχωρητή δεδομένων DR Όταν ο καταχωρητής shift δεν έχει δεδομένα για μετατόπιση, η τιμή του καταχωρητή δεδομένων θα μεταφερθεί περαιτέρω στον καταχωρητή μετατόπισης. Κατά τη διαδικασία μετατόπισης, τα επόμενα δεδομένα μπορούν να τοποθετηθούν απευθείας στον καταχωρητή δεδομένων και να περιμένουν. Μόλις ολοκληρωθεί η προηγούμενη μετατόπιση δεδομένων, τα επόμενα δεδομένα μπορούν να συνδεθούν απρόσκοπτα και να συνεχίσουν να αποστέλλονται. Όταν τα δεδομένα μεταφέρονται από τον καταχωρητή δεδομένων στον καταχωρητή μετατόπισης, το bit TXE του καταχωρητή κατάστασης ορίζεται σε 1, υποδεικνύοντας ότι ο καταχωρητής μετάδοσης είναι κενός.
Λήψη: Τα δεδομένα εισόδου μετακινούνται από τον ακροδέκτη στον καταχωρητή shift bit-bit Όταν συλλέγεται ένα byte δεδομένων, τα δεδομένα μεταφέρονται από τον καταχωρητή shift στον καταχωρητή δεδομένων ως σύνολο και η σημαία RXNE ορίζεται στο την ίδια στιγμή, υποδεικνύοντας τη λήψη Ο καταχωρητής δεν είναι κενός, τότε τα δεδομένα μπορούν να διαβαστούν από το μητρώο δεδομένων. Όσον αφορά το πότε να λάβετε και πότε να στείλετε, πρέπει να γράψετε τα αντίστοιχα bit στον καταχωρητή ελέγχου για λειτουργία.
Ο συγκριτής και ο καταχωρητής διευθύνσεων χρησιμοποιούνται σε λειτουργία υποτελούς λειτουργίας.
SCL: Ο έλεγχος ρολογιού χρησιμοποιείται για τον έλεγχο της γραμμής SCL. Γράψτε το αντίστοιχο bit στον καταχωρητή ελέγχου ρολογιού και το κύκλωμα θα εκτελέσει την αντίστοιχη λειτουργία. Λογικό κύκλωμα ελέγχου, η εγγραφή στον καταχωρητή ελέγχου μπορεί να ελέγξει ολόκληρο το κύκλωμα. Η κατάσταση λειτουργίας του κυκλώματος μπορεί να γίνει γνωστή διαβάζοντας τον καταχωρητή κατάστασης.
Κατά την αποστολή και λήψη πολλών byte, το DMA μπορεί να χρησιμοποιηθεί για τη βελτίωση της αποτελεσματικότητας.
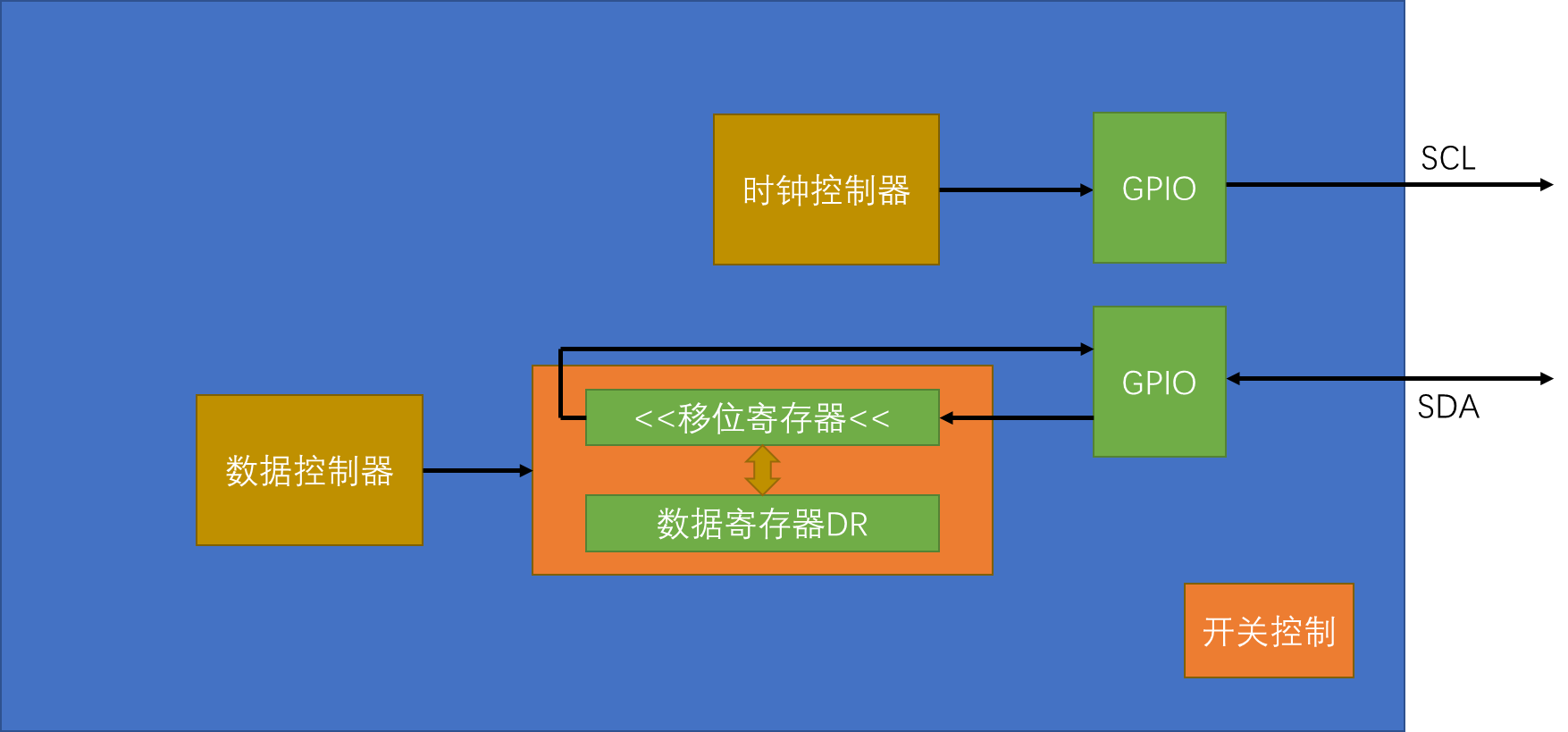
4.3 Βασική δομή I2C
SDA: Εφόσον το I2C είναι πρώτα υψηλής τάξης, αυτός ο καταχωρητής μετατόπισης μετατοπίζεται προς τα αριστερά. Κατά την αποστολή, το υψηλό bit μετακινείται πρώτα και μετά το δεύτερο υψηλό bit. Ένα ρολόι SCL μετατοπίζεται μία φορά και μετατοπίζεται 8 φορές και 8 byte μπορούν να τοποθετηθούν στη γραμμή SDA από υψηλό bit σε χαμηλό bit. Κατά τη λήψη, τα δεδομένα μετακινούνται από τα δεξιά μέσω της θύρας GPIO και, τέλος, 8 φορές, λαμβάνεται ένα byte. Τα δεδομένα εξόδου εξάγονται στη θύρα μέσω της θύρας GPIO. Τα δεδομένα εισόδου εισάγονται στον καταχωρητή shift μέσω της θύρας GPIO.
Η θύρα GPIO πρέπει να διαμορφωθεί σε λειτουργία εξόδου πολλαπλής αποστράγγισης σημαίνει ότι η κατάσταση της θύρας GPIO ελέγχεται από περιφερειακά στο τσιπ και η έξοδος ανοιχτής αποστράγγισης είναι η διαμόρφωση θύρας που απαιτείται από το πρωτόκολλο I2C. Ακόμη και σε λειτουργία εξόδου ανοιχτής αποστράγγισης, η θύρα GPIO μπορεί να εισαχθεί.
SCL: Ο ελεγκτής ρολογιού ελέγχει τη γραμμή του ρολογιού μέσω του GPIO.
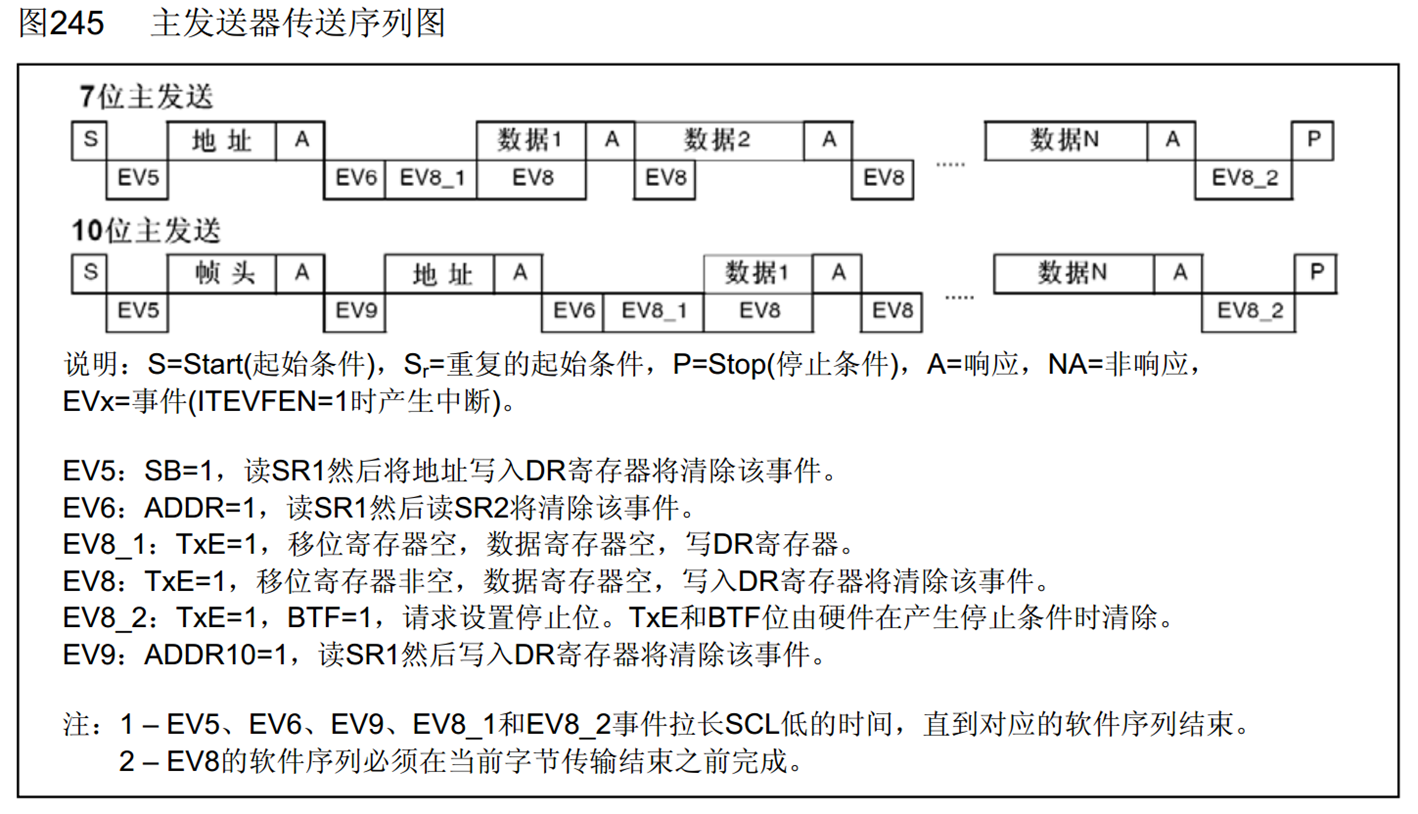
4.4 Αποστολές κεντρικού υπολογιστή
Όταν το STM32 θέλει να γράψει σε μια καθορισμένη διεύθυνση, πρέπει να ακολουθήσει το διάγραμμα ακολουθίας μετάδοσης πομπού.
Διεύθυνση 7-bit: Διευθυνσιοδοτείται το ένα byte μετά την συνθήκη έναρξης
Διεύθυνση 10-bit: Τα δύο byte μετά τη συνθήκη έναρξης είναι διευθυνσιοδοτήσεις Καθαρή διεύθυνση 8-bit.
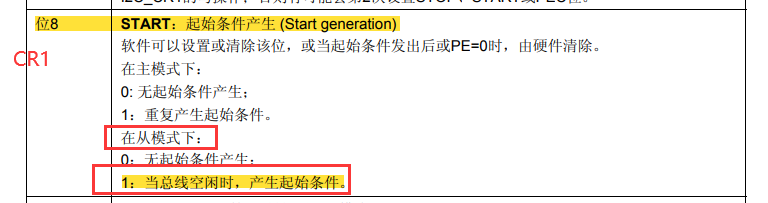
Μετά την αρχικοποίηση, ο δίαυλος ορίζεται από προεπιλογή σε κατάσταση αδράνειας και STM από προεπιλογή σε κατάσταση υποτελούς λειτουργίας Για να δημιουργηθεί μια συνθήκη έναρξης, το STM32 πρέπει να γράψει στον καταχωρητή ελέγχου (CR1), να γράψει 1 και, στη συνέχεια, το STM32 αλλάζει από κατάσταση υποτελούς λειτουργίας σε λειτουργία κύριας. .
Το συμβάν EV5 μπορεί να θεωρηθεί ως ένα bit σημαίας SB είναι ένα bit του καταχωρητή κατάστασης, υποδεικνύοντας την κατάσταση του υλικού SB=1.
Στη συνέχεια, μπορείτε να στείλετε ένα byte της εξαρτημένης διεύθυνσης. Η δευτερεύουσα διεύθυνση πρέπει να γραφτεί στον καταχωρητή δεδομένων DR. αποστέλλεται στο δίαυλο I2C και, στη συνέχεια, το υλικό θα λάβει αυτόματα την απάντηση και θα κρίνει εάν δεν υπάρχει απάντηση, το υλικό θα ορίσει τη σημαία αποτυχίας απόκρισης και, στη συνέχεια, η σημαία μπορεί να υποβάλει αίτηση για διακοπή για να μας υπενθυμίσει.
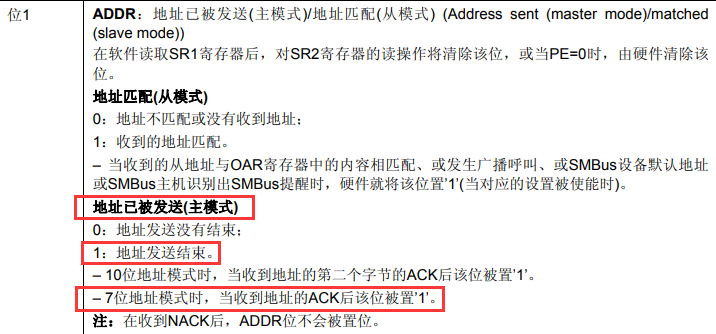
Όταν ολοκληρωθεί η διευθυνσιοδότηση, θα συμβεί το συμβάν EV6 και το bit σημαίας ADDR θα είναι 1. Αυτό το bit σημαίας υποδεικνύει το τέλος της μετάδοσης διεύθυνσης σε λειτουργία κύριας λειτουργίας.
Το συμβάν EV8_1 σημαίνει ότι η σημαία TxE είναι 1, ο καταχωρητής shift είναι κενός και ο καταχωρητής δεδομένων είναι άδειος θα αλλάξει αμέσως στο shift. Το συμβάν EV8 θα συμβεί Ο καταχωρητής shift δεν είναι κενός και ο καταχωρητής δεδομένων είναι κενός, πράγμα που σημαίνει ότι ο καταχωρητής μετατόπισης αποστέλλει δεδομένα. Αυτή τη στιγμή, τα δεδομένα 2 θα εγγραφούν στον καταχωρητή δεδομένων και βρίσκονται σε αναμονή Μετά τη λήψη του bit απόκρισης, τα bit δεδομένων μεταφέρονται στον καταχωρητή στροφής για μετάδοση Ο καταχωρητής δεδομένων είναι κενός, οπότε αυτή τη στιγμή, το περιστατικό EV8 συνέβη ξανά.
Στη συνέχεια αποστέλλονται τα δεδομένα 2, αλλά αυτή τη φορά τα επόμενα δεδομένα έχουν γραφτεί στον καταχωρητή δεδομένων και περιμένουν. Μόλις εντοπιστεί το συμβάν EV8, μπορούν να εγγραφούν τα επόμενα δεδομένα.
Αφού εγγραφούν τα δεδομένα που θέλετε να στείλετε, δεν εγγράφονται νέα δεδομένα στον καταχωρητή δεδομένων. Συμβάν EV8_2, TxE=1 σημαίνει ότι ο καταχωρητής μετατόπισης είναι κενός, ο καταχωρητής δεδομένων είναι κενός, BTF: σημαία λήξης μετάδοσης byte, κατά τη μετάδοση, πότε θα σταλεί νέα δεδομένα και ο καταχωρητής δεδομένων δεν έχει γραφτεί με νέα δεδομένα. Όταν εντοπιστεί EV8_2, μπορεί να δημιουργηθεί η συνθήκη τερματισμού Stop. Για να δημιουργηθεί μια συνθήκη τερματισμού, προφανώς, θα πρέπει να υπάρχουν αντίστοιχα bits στον καταχωρητή ελέγχου που μπορούν να ελεγχθούν. Με αυτόν τον τρόπο, η ακολουθία αποστολής έχει τελειώσει.
Πρώτα, γράψτε το bit έναρξης του καταχωρητή ελέγχου για να δημιουργήσετε μια συνθήκη έναρξης και, στη συνέχεια, περιμένετε για το συμβάν EV5 (που υποδεικνύει ότι η συνθήκη έναρξης έχει σταλεί).
Μετά τη διευθυνσιοδότηση, λαμβάνεται η απάντηση και μετά το τέλος δημιουργείται ένα συμβάν EV6 (που υποδεικνύει ότι η διευθυνσιοδότηση έχει ολοκληρωθεί).
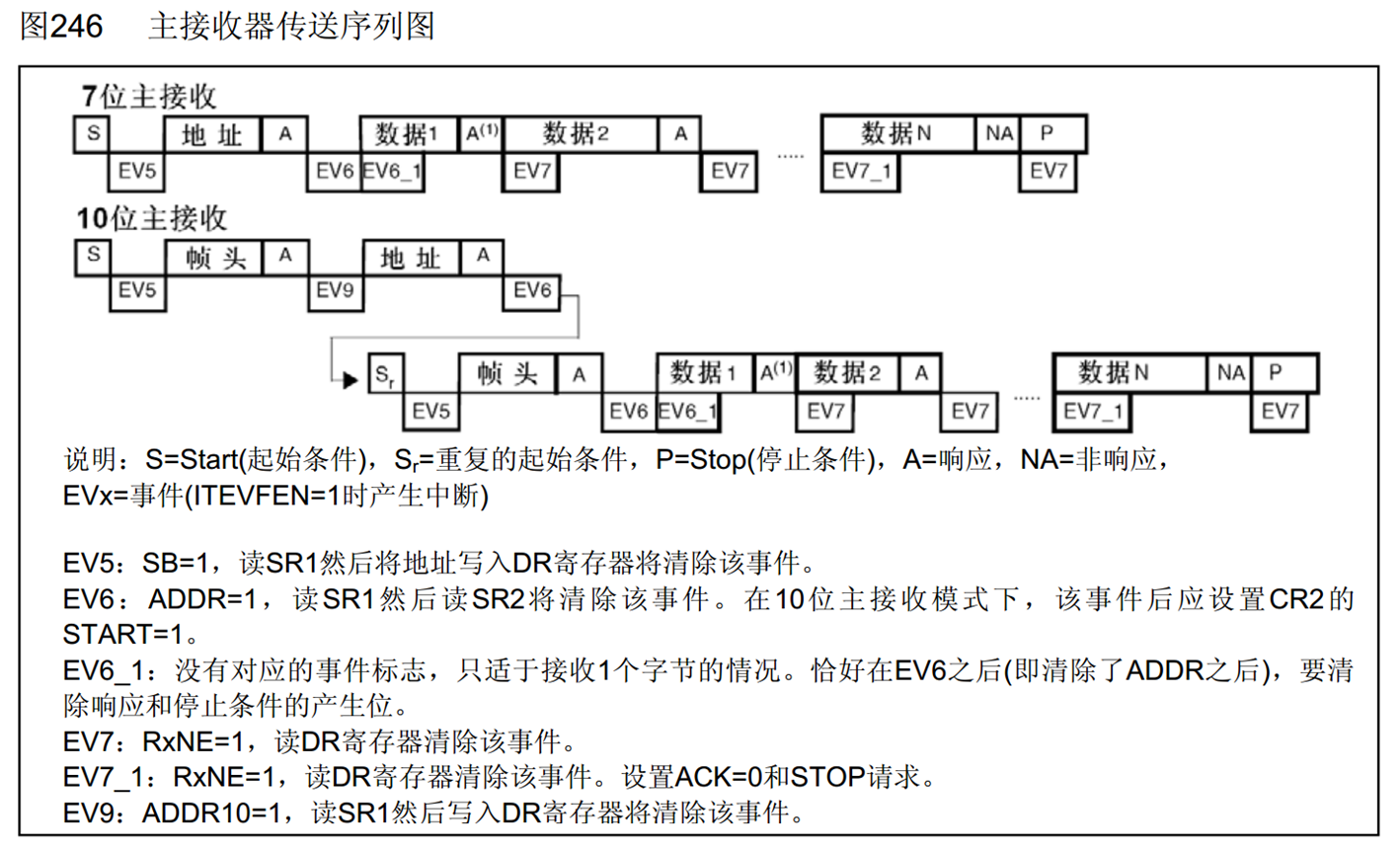
Δεδομένα 1 σημαίνει ότι τα δεδομένα εισάγονται μέσω του καταχωρητή μετατόπισης.
Το EV6_1 υποδεικνύει ότι τα δεδομένα εξακολουθούν να μετατοπίζονται Μετά τη λήψη της απάντησης, σημαίνει ότι ο καταχωρητής μετατόπισης έχει μετακινηθεί επιτυχώς σε ένα byte δεδομένων 1. Αυτή τη στιγμή, το μετατοπισμένο byte μεταφέρεται στον καταχωρητή δεδομένων ως σύνολο. Η σημαία RxNE ορίζεται ταυτόχρονα, υποδεικνύοντας ότι ο καταχωρητής δεδομένων δεν είναι κενός, δηλαδή έχει ληφθεί ένα byte δεδομένων. Η κατάσταση είναι ένα συμβάν EV7, RxNE=1 διαγράφει το συμβάν ότι τα δεδομένα έχουν ληφθεί Αφού διαβάσουμε τα δεδομένα, το συμβάν Δεν υπάρχει άλλο.
Φυσικά, όταν τα δεδομένα 1 δεν έχουν διαβαστεί, τα δεδομένα 2 μπορούν να μετακινηθούν απευθείας στον καταχωρητή μετατόπισης Μετά από αυτό, η μετατόπιση των δεδομένων 2 ολοκληρώνεται, τα δεδομένα 2 λαμβάνονται, ένα συμβάν EV7 δημιουργείται, τα δεδομένα 2 διαβάζονται και. το συμβάν EV7 έχει φύγει.
Όταν δεν χρειάζεται άλλη λήψη, ο καταχωρητής ελέγχου bit απόκρισης ACK πρέπει να ρυθμιστεί εκ των προτέρων στο 0 όταν εμφανιστεί η τελευταία μονάδα χρονισμού και να οριστεί το αίτημα τερματισμού, δηλαδή το συμβάν EV7_1, στη συνέχεια, ένα συμβάν μη απόκρισης Θα δοθεί αφού έχει οριστεί το bit STOP, δημιουργείται μια συνθήκη τερματισμού.
Το SCL συνδέεται με τον ακροδέκτη PB10 του STM32 και το SDA συνδέεται στον ακροδέκτη PB11. Δεδομένου ότι η αναστροφή επιπέδου λογισμικού εφαρμόζεται εδώ, δύο θύρες GPIO μπορούν να συνδεθούν κατά βούληση. Τα κορυφαία δεδομένα του OLED είναι ο αριθμός ID της συσκευής Ο αριθμός ID αυτού του MPU6050 είναι σταθερός στο 0x68. Παρακάτω, τα τρία στα αριστερά είναι τα δεδομένα εξόδου του αισθητήρα επιτάχυνσης, τα οποία είναι η επιτάχυνση του άξονα X, του άξονα Y και του άξονα Z αντίστοιχα. που είναι η γωνιακή ταχύτητα του άξονα Χ, του άξονα Υ και του άξονα Ζ.
5.2.2 Αποτελέσματα λειτουργίας
5.2.3 Διαδικασία εφαρμογής κώδικα
Διαμόρφωση περιφερειακών I2C, προετοιμασία περιφερειακών I2C, αντικατάσταση MyI2C_Init (1) Ενεργοποιήστε το ρολόι της περιφερειακής συσκευής I2C και της αντίστοιχης θύρας GPIO, (2) Εκκινήστε τη θύρα GPIO που αντιστοιχεί στο περιφερειακό I2C στη λειτουργία πολυπλεξίας ανοιχτής αποστράγγισης (3) Χρησιμοποιήστε τη δομή για να διαμορφώσετε ολόκληρο το I2C (4) I2C_Cmd, ενεργοποιήστε το I2C
Ελέγξτε τα περιφερειακά κυκλώματα, συνειδητοποιήστε το χρόνο εγγραφής σε καθορισμένες διευθύνσεις και αντικαταστήστε το WriteReg
Ελέγξτε το περιφερειακό κύκλωμα για να συνειδητοποιήσετε το χρονισμό της ανάγνωσης της καθορισμένης διεύθυνσης και αντικαταστήστε το ReadReg