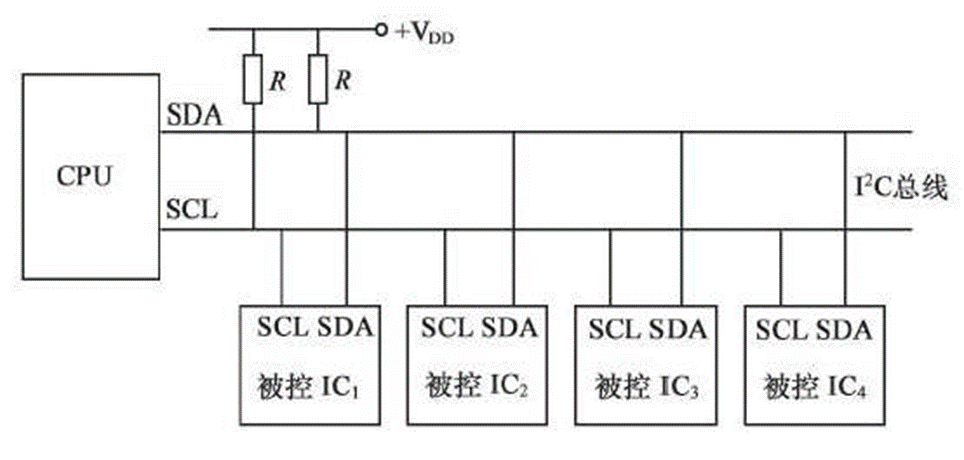
Supporta il montaggio di più dispositivi sul bus (un master e più slave, più master e più slave)
Un master, più slave: il microcontrollore funge da host e domina il funzionamento del bus I2C. Tutti i moduli esterni montati sul bus I2C sono slave. Gli slave possono controllare il bus I2C solo dopo essere stati nominati dall'host e non possono toccarlo senza autorizzazione. bus I2C per prevenire conflitti.
Multimaster e multislave: qualsiasi modulo sul bus può saltare fuori attivamente e fungere da master. Quando si verifica un conflitto sul bus, il protocollo I2C condurrà l'arbitrato. La parte che vince l'arbitrato ottiene il controllo del bus e la parte perdente diventa automaticamente una schiava.
1.2 Circuito hardware
Gli SCL di tutti i dispositivi I2C sono collegati insieme e l'SDA è collegato insieme.
Sia SCL che SDA del dispositivo devono essere configurati in modalità di uscita open-drain.
Aggiungi un resistore pull-up a ciascuno tra SCL e SDA, il valore della resistenza è generalmente di circa 4,7 KΩ
Un master e più slave: la CPU è un microcomputer a chip singolo, in quanto master del bus, include il controllo completo della linea SCL in qualsiasi momento. Inoltre, nello stato inattivo, l'host può avviare attivamente il controllo di SDA. Solo quando lo slave invia dati e lo slave risponde, l'host trasferirà il controllo di SDA allo slave.
L'IC controllato è uno slave montato sul bus I2C, che può essere un sensore di assetto, un OLED, una memoria, un modulo orologio, ecc. La potenza dello slave è relativamente piccola. Per la linea di clock SCL, può solo leggere passivamente in qualsiasi momento. Allo slave non è consentito controllare la linea SCL. Per la linea dati SDA, allo slave non è consentito avviare attivamente il controllo di SDA. Solo dopo che il master invia un comando di lettura allo slave, o quando lo slave risponde, lo slave può acquisire brevemente il controllo dell'SDA.
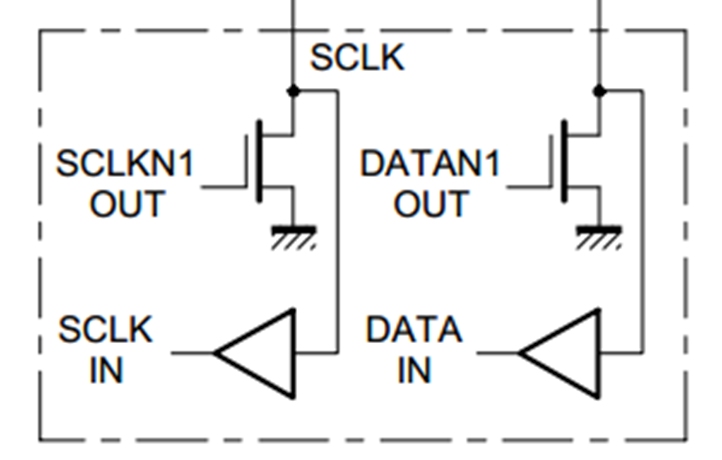
Figura 2: SCL a sinistra e SDA a destra. Tutti i dati possono essere immessi tramite un buffer di dati o un trigger Schmitt.
Poiché l'ingresso non ha alcun effetto sul circuito, qualsiasi dispositivo può avere ingresso in qualsiasi momento.
L'uscita utilizza una configurazione di uscita a drain aperto. Quando l'uscita è bassa, l'interruttore è acceso e il pin è collegato direttamente a terra, che è un forte pulldown; quando l'uscita è alta, l'interruttore è spento e il pin non è collegato a nulla ed è in uno stato fluttuante, in modo che tutti i dispositivi possano emettere solo un livello basso ma non un livello alto. Per evitare il fluttuazione causato dal livello alto, SCL e SDA devono avere un resistore pull-up esterno il bus, attraverso un resistore, è tirato ad un livello alto, quindi è un pull-up debole. In questo modo, in primo luogo, si elimina completamente il fenomeno del cortocircuito di alimentazione e si garantisce la sicurezza del circuito, in secondo luogo si evita la commutazione frequente delle modalità dei pin; In modalità open-drain, emettere un livello alto equivale a scollegare il pin, quindi è possibile emettere direttamente un livello alto prima dell'immissione. In terzo luogo, questa modalità ha un fenomeno "AND cablato". Finché uno o più dispositivi emettono un livello basso, il bus è a un livello basso. Solo quando tutti i dispositivi emettono un livello alto, il bus è a un livello alto. . Pertanto, I2C può trarre vantaggio da questo fenomeno per eseguire la sincronizzazione dell'orologio e l'arbitraggio del bus in modalità multi-master. Quindi, sebbene SCL qui possa utilizzare l'uscita push-pull in modalità un master e più slave, utilizza comunque la modalità di uscita open-drain più pull-out.
1.3 Unità base di temporizzazione I2C
1.3.1 Condizioni iniziali e condizioni finali
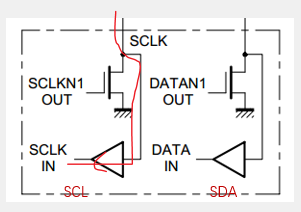
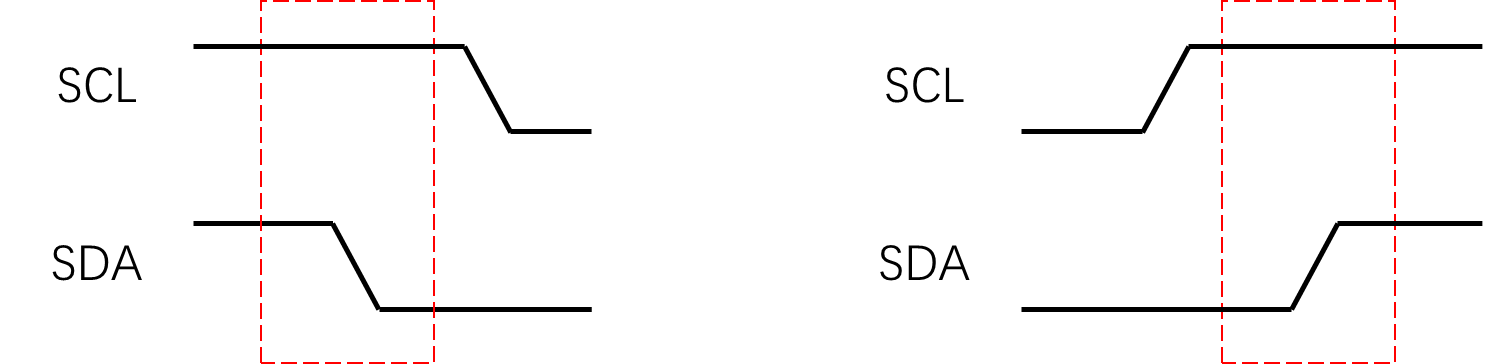
condizione di partenza: Durante il livello alto SCL, SDA passa dal livello alto al livello basso
Condizione di cessazione: Durante il livello alto SCL, SDA passa dal livello basso al livello alto
nelle condizioni iniziali : Quando il bus I2C è in stato inattivo, sia SCL che SDA sono in uno stato di livello alto, ovvero nessun dispositivo tocca SCL e SDA e SDA vengono portati a livello alto da resistori pull-up esterni e il bus lo è in uno stato tranquillo. Quando l'host deve inviare e ricevere dati, deve prima rompere il silenzio del bus e generare una condizione di avvio, ovvero SCL è a un livello alto senza toccarlo, quindi abbassare SDA per generare un fronte di discesa. Quando lo slave cattura il livello alto SCL e il segnale del fronte di discesa SDA, si resetterà e attenderà la chiamata del master. Dopo il fronte di discesa di SDA, l'host deve abbattere nuovamente SCL, da un lato per occupare il bus e, dall'altro, anche per facilitare la giunzione dell'unità di base. Successivamente verrà garantito che, ad eccezione delle condizioni di avvio e arresto, l'SCL di ciascuna unità sequenziale inizia con un livello basso e termina con un livello basso.
Nello stato della condizione di terminazione : SCL lascia andare per primo e rimbalza al livello alto, poi SDA lascia andare e rimbalza al livello alto, generando un fronte di salita, che innesca la condizione di terminazione. Dopo la condizione di terminazione simultanea, sia SCL che SDA sono elevati e ritornano allo stato calmo iniziale. L'avvio e l'arresto sono generati dall'host e allo slave non è consentito generare l'avvio e l'arresto. Pertanto, quando l'autobus è inattivo, lo schiavo deve sempre rilasciare le mani e non gli è consentito saltare fuori e toccare l'autobus.
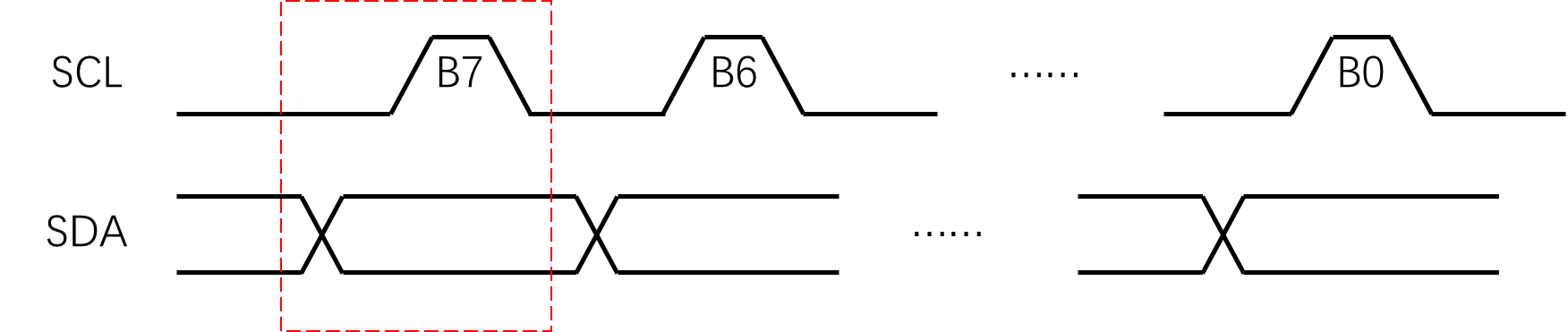
1.3.2 Invia un byte
Invia un byte: Durante il livello basso di SCL, l'host inserisce i bit di dati sulla linea SDA in sequenza (prima il bit alto), quindi rilascia SCL. Lo slave leggerà i bit di dati durante il livello alto di SCL, quindi SDA non è consentito per avere tutti i dati durante il livello alto di SCL. Quando i dati cambiano, ripetere il processo sopra 8 volte per inviare un byte.
L'host di basso livello inserisce i dati e lo slave di alto livello legge i dati. Dopo la condizione di avvio, anche il primo byte deve essere inviato dall'host. Quando SCL è basso, se l'host vuole inviare 0, abbassa SDA, se vuole inviare 1, lascia andare e SDA ritorna al livello alto; Durante il livello basso di SCL, il livello di SDA può cambiare Dopo che i dati sono stati inseriti, l'host rilascia la linea dell'orologio e SCL ritorna al livello alto. Durante il livello alto, è il momento in cui lo slave legge SDA, quindi durante il livello alto, SDA non può cambiare. Dopo che SCL ha raggiunto un livello alto, lo slave deve leggere SDA il più rapidamente possibile. Generalmente, lo slave ha completato la lettura sul fronte di salita di SCL. Poiché l'orologio è controllato dal master, lo slave non sa quando si verifica il fronte di discesa, quindi leggerà i dati sul fronte di salita di SCL. Dopo che l'host ha lasciato andare SCL per un periodo di tempo, può continuare a abbassare SCL e trasmettere il bit successivo. L'host deve inoltre inserire i dati su SDA il prima possibile dopo il fronte di discesa di SCL. Ma l'host ha il controllo sull'orologio, quindi deve solo inserire i dati su SDA in qualsiasi momento quando il livello basso è basso. Dopo che i dati sono stati rilasciati, l'host rilascia nuovamente SCL, SCL è alto e lo slave legge questo bit. Ripeti questo processo: l'host abbassa SCL, inserisce i dati su SDA, l'host rilascia SCL e lo slave legge i dati SDA. Nella sincronizzazione di SCL, il master trasmette e lo slave riceve in sequenza. Dopo 8 cicli, vengono inviati dati a 8 bit, ovvero un byte. Poiché è il bit di ordine più alto per primo, il primo bit è il bit più alto B7 di un byte e il bit più basso B0 viene inviato per ultimo.
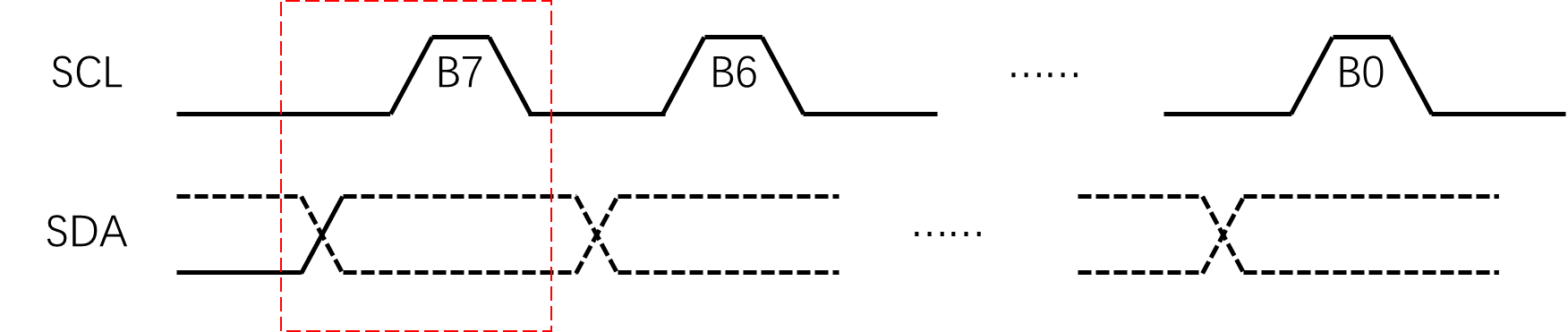
1.3.3 Ricevere un byte
ricevere un byte: Durante il livello basso di SCL, lo slave mette i bit di dati sulla linea SDA in sequenza (prima il bit alto), quindi rilascia SCL. L'host leggerà i bit di dati durante il livello alto di SCL, quindi SDA non è consentito per avere tutti i dati durante il livello alto di SCL Quando i dati cambiano, ripetere il processo sopra 8 volte per ricevere un byte (l'host deve rilasciare SDA prima di ricevere).
Lo slave di basso livello inserisce i dati, l'host di alto livello legge i dati Linea SDA: il master deve rilasciare SDA prima di ricevere. In questo momento, lo slave ottiene il controllo di SDA. Se lo slave deve inviare 0, abbassa SDA. Se lo slave deve inviare 1, lascia andare e SDA rimbalza ad alti livelli. Il livello basso converte i dati, il livello alto legge i dati. La linea continua rappresenta il livello controllato dal master, mentre la linea tratteggiata rappresenta il livello controllato dallo slave. SCL è controllato dall'host durante l'intero processo e l'host SDA deve essere rilasciato prima di ricevere e consegnato allo slave per il controllo. Poiché l'orologio SCL è controllato dall'host, la conversione dei dati dello slave viene sostanzialmente eseguita sul fronte di discesa di SCL e l'host può leggere in qualsiasi momento quando SCL è alto.
1.3.4 Invia risposta e ricevi risposta
Invia risposta: Dopo aver ricevuto un byte, l'host invia un bit di dati all'orologio successivo. I dati 0 indicano la risposta e i dati 1 indicano la mancata risposta.
ricevere risposta: Dopo che l'host ha inviato un byte, riceve un bit di dati all'orologio successivo per determinare se lo slave risponde. Dati 0 indica risposta, dati 1 indica mancata risposta (l'host deve rilasciare SDA prima di ricevere).
Cioè, dopo aver chiamato il tempo di invio di un byte, deve essere seguito il tempo di chiamata della risposta di ricezione, che serve per determinare se lo slave ha ricevuto i dati appena forniti. Se lo slave lo riceve, nel bit di risposta, quando il master rilascia SDA, lo slave dovrebbe immediatamente abbassare SDA e quindi durante il livello alto di SCL, l'host legge il bit di risposta. Se il bit di risposta è 0 significa che lo slave lo ha effettivamente ricevuto. Quando si riceve un byte, è necessario chiamare la risposta di invio. Lo scopo dell'invio di una risposta è dire allo slave se si desidera continuare a inviare. Se la macchina slave riceve una risposta dal master dopo aver inviato un dato, la macchina slave continuerà a inviare. Se la macchina slave non riceve una risposta dalla macchina master, la macchina slave penserà che sia presente un dato stato inviato, ma la macchina master mi ignora. Forse L'host non lo vuole In questo momento, lo slave rilascerà obbedientemente SDA e cederà il controllo di SDA per evitare interferenze con le operazioni successive dell'host.
1.4 Tempistiche I2C
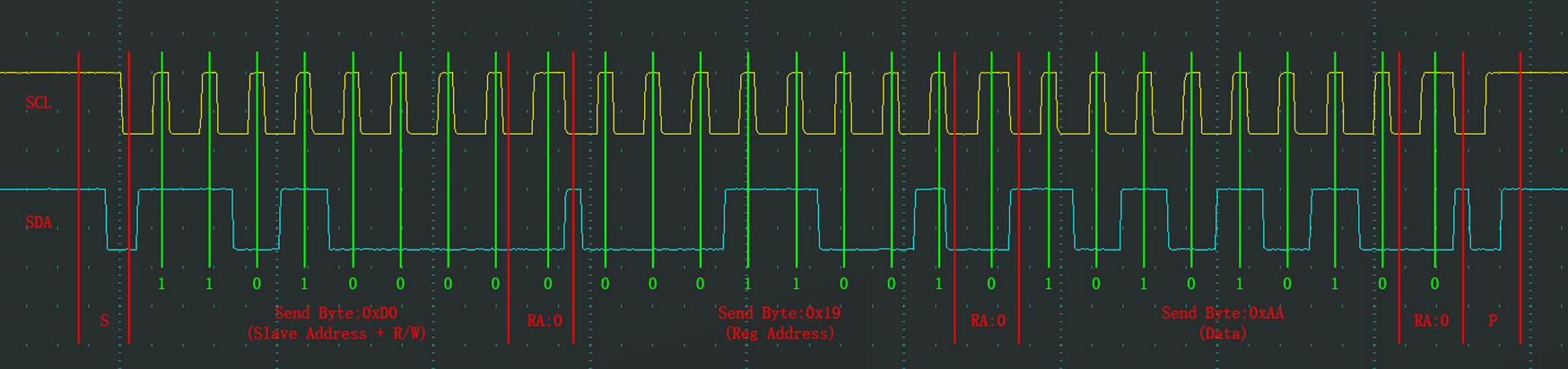
1.4.1 Specificare l'indirizzo da scrivere
Specificare l'indirizzo a cui scrivere
Per il dispositivo specificato (indirizzo slave), scrivere i dati specificati (dati) all'indirizzo specificato (indirizzo registro) (ovvero, l'indirizzo del registro del dispositivo specificato)
processi: (1) Condizioni iniziali (2) Momento di invio di un byte: 0xD0 (indirizzo slave (7 bit) + scrittura (1 bit)-0) (1101 0000) (3) Ricevi risposta: RA = 0 (ricevi la risposta dallo slave) (4) Indirizzo specificato: 0x19 (0001 1001) (5) Ricevi risposta: RA = 0 (ricevi la risposta dallo slave) (6) Scrivi i dati specificati: 0xAA (1010 1010) (7) Ricevere risposta: RA = 0 (8) Bit di stop P (condizione di terminazione)
Dopo la condizione di avvio, deve essere il momento di inviare un byte. Il contenuto del byte deve essere l'indirizzo dello slave + i bit di lettura e scrittura. L'indirizzo dello slave è di 7 bit e i bit di lettura e scrittura sono di 1 bit, che è esattamente 8 bit. L'invio dell'indirizzo dello slave serve per determinare l'oggetto di comunicazione, mentre l'invio del bit di lettura e scrittura serve per confermare se scrivere o leggere successivamente. Ora l'host invia un pezzo di dati. Il contenuto del byte viene convertito in esadecimale. Il bit di ordine superiore è 0xD0. L'unità successiva è il bit di risposta (RA) dello slave ricevente. il bit di scrittura termina e SCL viene abbassato. Successivamente, l'host deve rilasciare SDA, seguito dal bit di riconoscimento RA.
Il livello alto dopo la fine del bit di risposta RA è generato dallo slave che rilascia SDA. Lo slave passa il controllo di SDA poiché lo slave vuole scambiare dati il prima possibile al livello basso di SCL, il fronte di salita di SDA e il fronte di discesa di SCL è avvenuto quasi simultaneamente.
Una volta completata la risposta, se si continua a inviare un byte, il secondo byte può essere inviato all'interno del dispositivo designato. Il dispositivo slave può definire l'utilizzo del secondo sé e dei byte successivi. Generalmente, il secondo byte può essere un indirizzo di registro o una parola di controllo di istruzione, ecc., e il terzo byte è il contenuto che l'host desidera scrivere nell'indirizzo di registro (secondo byte).
P è il bit di stop.
Lo scopo di questo frame di dati è: per il dispositivo che specifica l'indirizzo slave 1101000, scrivere i dati 0xAA nel suo registro interno all'indirizzo 0x19. 0 significa: l'host eseguirà un'operazione di scrittura nelle tempistiche successive; 1 significa: l'host eseguirà un'operazione di lettura nella sequenza temporale successiva;
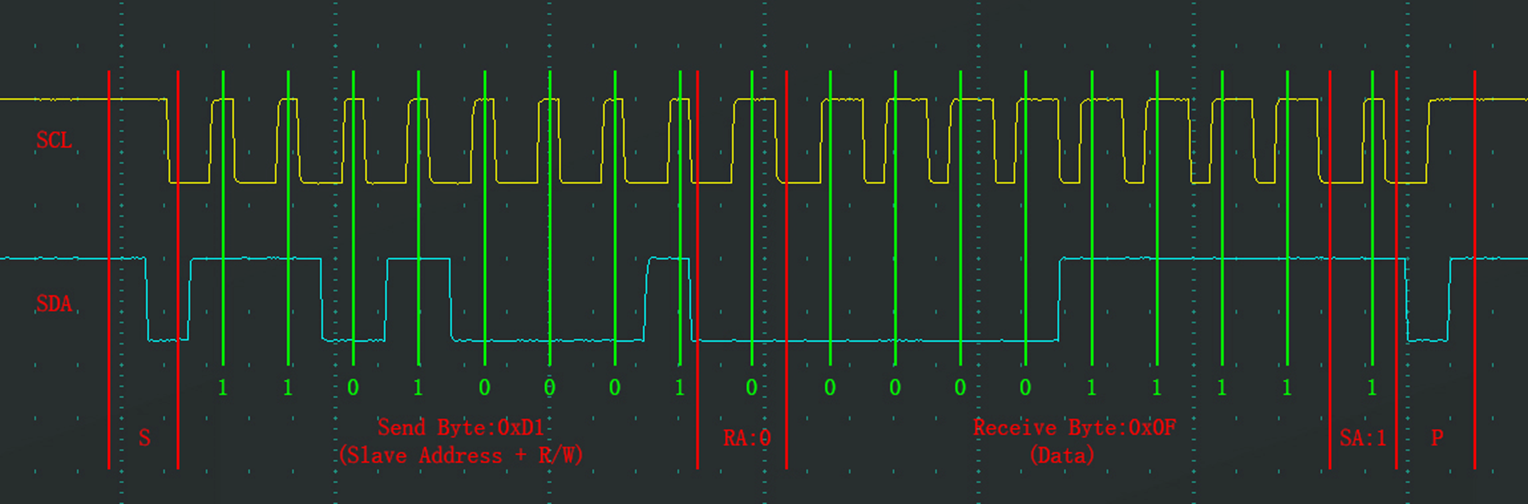
1.4.2 Lettura indirizzo corrente
Indirizzo attuale letto
Per il dispositivo specificato (indirizzo slave), leggere i dati dello slave (dati) all'indirizzo indicato dal puntatore dell'indirizzo corrente.
processi: (1) Condizioni iniziali (2) Momento di invio di un byte: 0xD1 (indirizzo slave (7 bit) + lettura (1 bit)-1) (1101 0001) (3) Ricevi risposta: RA = 0 (ricevi la risposta dallo slave) (4) Leggi i dati dello slave: 0x0F (0000 1111) (7) Invia risposta: SA = 0 (8) Bit di stop P (condizione di terminazione)
Il bit di lettura e scrittura è 1, indicando che deve essere eseguita la successiva operazione di lettura. Dopo la risposta dello slave (RA=0), la direzione di trasmissione dei dati verrà invertita. Il master vuole cedere il controllo di SDA allo slave e il master chiama il tempo di ricezione di un byte per eseguire l'operazione di ricezione.
Nel secondo byte, lo slave ottiene il permesso dal master e può scrivere su SCL durante il livello basso di SCL. Il master legge SDA durante il livello alto di SCL. Infine, il master legge in sequenza durante il livello alto di SCL 8 bit, viene ricevuto un byte di dati inviato dallo slave, che è 0x0F. Ma quale registro dello slave è 0x0F? Nei tempi di lettura, il protocollo I2C stabilisce che quando l'host si sta indirizzando, una volta che il flag di lettura e scrittura è impostato su 1. Il byte successivo passerà immediatamente alla temporizzazione di lettura. Pertanto, l'host inizierà a ricevere prima di avere il tempo di specificare quale registro desidera leggere, quindi non è presente alcun collegamento per specificare l'indirizzo qui. Nella macchina slave, tutti i registri sono allocati in un'area lineare e ci sarà una variabile puntatore separata che indica uno dei registri. Questo puntatore per impostazione predefinita è all'accensione, generalmente punta all'indirizzo 0 e ogni volta che viene scritto un byte e Dopo aver letto un byte, il puntatore si incrementerà automaticamente una volta e si sposterà alla posizione successiva. Quindi, quando si richiama il tempo di lettura dell'indirizzo corrente, se l'host non specifica quale indirizzo leggere, lo slave tornerà al registro puntato dal. puntatore corrente.
1.4.3 Leggi all'indirizzo specificato
Specificare l'indirizzo da leggere
Per il dispositivo specificato (Slave Address), sotto l'indirizzo specificato (Reg Address), leggere i dati dello slave (Data)
Inizia prima, poi ripeti l'avvio, quindi fermati processi: (1) Condizioni iniziali (2) Momento di invio di un byte: 0xD0 (indirizzo slave (7 bit) + scrittura (1 bit)-0) (1101 0000) (3) Ricevi risposta: RA = 0 (ricevi la risposta dallo slave) (4) Indirizzo specificato: 0x19 (0001 1001) (5) Ricevi risposta: RA = 0 (ricevi la risposta dallo slave) (6) Ripetere la condizione iniziale (7) Momento di invio di un byte: 0xD1 (indirizzo slave (7 bit) + lettura (1 bit)-1) (1101 0001) (8) Ricevere risposta: RA = 0 (9) Leggi i dati dello slave: 0xAA (1010 1010) (10) Invia risposta: SA = 0 (11) Bit di stop P (condizione di terminazione)
La prima parte è scrivere all'indirizzo specificato, ma viene specificato solo l'indirizzo e non c'è tempo per scrivere; la seconda parte è leggere l'indirizzo corrente, poiché l'indirizzo è appena stato specificato, quindi l'indirizzo corrente è letto; chiamato di nuovo.
L'indirizzo dello slave specificato è 1101000, il flag di lettura-scrittura è 0 e l'operazione di scrittura viene eseguita dopo che lo slave ha risposto, viene scritto un altro byte (il secondo byte) per specificare l'indirizzo 0x19 nello slave puntatore dell'indirizzo, vale a dire, dopo che lo slave ha ricevuto i dati, il suo puntatore del registro punta alla posizione 0x19.
Sr è una condizione di avvio ripetuta, che equivale ad avviare una nuova temporizzazione. Poiché il flag di lettura e scrittura specificato può seguire solo il primo byte della condizione di avvio, quindi se si desidera invertire la direzione di lettura e scrittura, è possibile avere solo. un'altra condizione iniziale.
Quindi, dopo la condizione di avvio, reindirizzare e specificare il bit del flag di lettura-scrittura. A questo punto, il bit del flag di lettura-scrittura è 1, indicando che deve essere letto. Quindi l'host riceve un byte, che rappresenta i dati 0xAA all'indirizzo 0x19.
2. MPU6050
2.1 Introduzione all'MPU6050
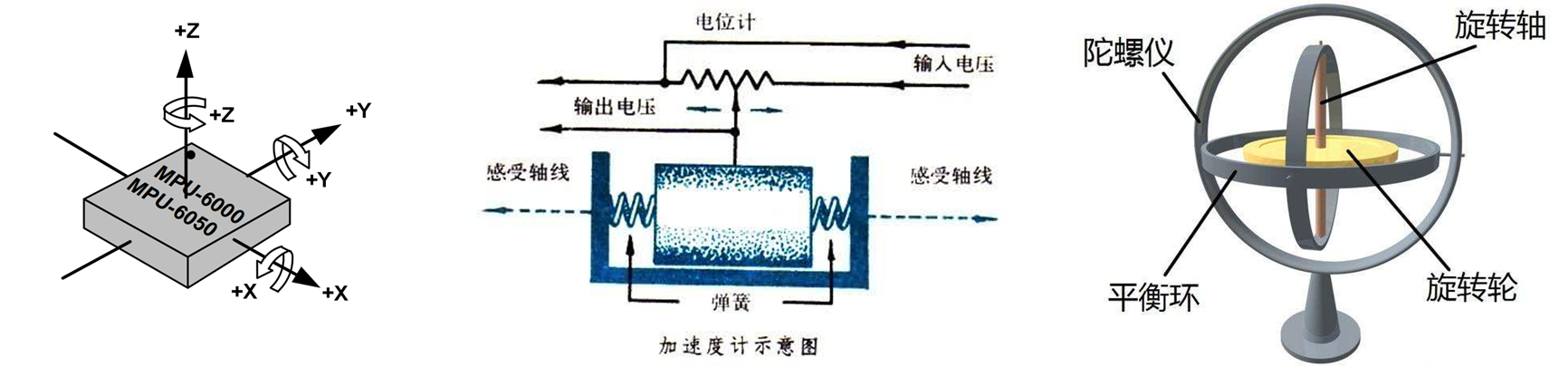
MPU6050 è un sensore di assetto a 6 assi in grado di misurare i parametri di accelerazione e velocità angolare degli assi X, Y e Z del chip. Attraverso la fusione dei dati, è possibile ottenere ulteriormente l'angolo di assetto (angolo di Eulero). bilanciare veicoli, aerei, ecc. che devono rilevare la scena del gesto
Accelerometro a 3 assi (Accelerometro): misura l'accelerazione degli assi X, Y e Z
Sensore giroscopico a 3 assi (giroscopio): misura la velocità angolare degli assi X, Y e Z
Prendendo come esempio la fusoliera dell'aereo, l'angolo di Eulero è l'angolo tra la fusoliera dell'aereo e i tre assi iniziali.
aereoIl muso dell'aereo si inclina verso il basso o verso l'alto, si chiama l'angolo compreso tra questo assePece;
aereoLa fusoliera rotola a sinistra o a destra, si chiama l'angolo compreso tra questo asseRotolo;
aereoMantenere la fusoliera a livello,Girare il muso dell'aereo a sinistra o a destra, si chiama l'angolo compreso tra questo asseImbardata。
L'angolo di Eulero rappresenta l'assetto dell'aereo in questo momento, sia che sia inclinato verso l'alto o verso il basso, inclinato a sinistra o a destra.
Gli algoritmi comuni di fusione dei dati includono generalmente il filtraggio complementare, il filtraggio di Kalman, ecc. e il calcolo dell'assetto nella navigazione inerziale.
Accelerometro : La linea tratteggiata al centro è l'asse di induzione. Al centro c'è un piccolo cursore con una certa massa che può scorrere a destra e a sinistra. Contro di esso c'è una molla. Quando il cursore si muove, farà muovere il potenziometro su di esso. Questo potenziometro è un resistore divisore di tensione. Misurando la tensione in uscita dal potenziometro, è possibile ottenere il valore di accelerazione del piccolo cursore. Questo accelerometro è in realtà un dinamometro a molla. Secondo la seconda legge di Newton, F = ma, se vuoi misurare l'accelerazione a, puoi trovare un oggetto con massa unitaria e misurare la forza F. Questo è tutto. C'è un accelerometro su ciascuno degli assi X, Y e Z. Gli accelerometri hanno stabilità statica ma non stabilità dinamica.
Sensore giroscopico : Al centro c'è una ruota rotante con una certa massa. Quando la ruota rotante gira ad alta velocità, secondo il principio di conservazione del momento angolare, la ruota rotante ha la tendenza a mantenere il suo momento angolare originale direzione dell'asse di rotazione invariata. Quando la direzione dell'oggetto esterno ruota, la direzione dell'asse di rotazione interna non ruoterà, il che produrrà una deviazione angolare in corrispondenza della connessione dell'anello di bilanciamento. Se si inserisce un potenziometro rotante sul collegamento e si misura la tensione del potenziometro, è possibile ottenere l'angolo di rotazione. Il giroscopio dovrebbe essere in grado di ottenere direttamente l'angolo, ma il giroscopio di questo MPU6050 non può misurare direttamente l'angolo. Misura la velocità angolare, ovvero la velocità angolare del chip che ruota attorno all'asse X, all'asse Y e all'asse Z. -asse. L'integrale della velocità angolare è l'angolo. Tuttavia, quando l'oggetto è fermo, il valore della velocità angolare non può essere completamente riportato a zero a causa del rumore. Quindi, dopo l'accumulo continuo di integrali, questo piccolo rumore causerà una lenta deriva dell'angolo calcolato. che è l'angolo ottenuto integrando la velocità angolare. Non può resistere alla prova del tempo, ma questo angolo non è un problema se è fermo o in movimento e non sarà influenzato dal movimento dell'oggetto. I giroscopi hanno stabilità dinamica, non stabilità statica.
Secondo l'accelerometro, che ha stabilità statica ma non ha stabilità dinamica; il giroscopio ha stabilità dinamica ma non ha stabilità statica. Queste due caratteristiche possono quindi imparare dai reciproci punti di forza e integrarsi a vicenda eseguendo filtri complementari , possiamo integrare sia la stabilità statica che quella dinamica. La postura è scomoda.
2.2 Parametri dell'MPU6050
L'ADC a 16 bit raccoglie il segnale analogico del sensore, intervallo di quantizzazione: -32768~32767
Selezione fondo scala giroscopio: ±250, ±500, ±1000, ±2000 (°/sec, gradi/secondo, unità di velocità angolare, quanti gradi di rotazione al secondo) (maggiore è la selezione fondo scala, più ampia è la intervallo di misurazione. Quanto più piccolo è il campo di fondo scala, tanto maggiore sarà la risoluzione della misurazione).
Filtro passa-basso digitale configurabile: è possibile configurare un registro per selezionare il filtraggio passa-basso dei dati di uscita.
Sorgente orologio configurabile
Divisione della frequenza di campionamento configurabile: la sorgente del clock può essere divisa dal divisore di frequenza per fornire clock per la conversione AD e altri circuiti interni. Controllando il coefficiente di divisione della frequenza, è possibile controllare la velocità della conversione AD.
Indirizzo slave I2C: 1101000 (AD0=0) o 1101001 (AD0=1)
110 1000 viene convertito in esadecimale, ovvero 0x68, quindi alcuni dicono che l'indirizzo slave di MPU6050 è 0x68. Ma nella comunicazione I2C, i 7 bit alti del primo byte sono l'indirizzo dello slave e il bit più basso è il bit di lettura e scrittura. Pertanto, se si pensa che 0x68 sia l'indirizzo dello slave, quando si invia il primo byte, è necessario prima modificarlo 0x68 Sposta a sinistra di 1 bit (0x68 << 1), quindi leggi e scrivi bit bit a bit o in alto, leggi 1 e scrivi 0.
Un altro metodo consiste nello spostare i dati di 0x68 a sinistra di 1 bit (0x68 << 1) come indirizzo slave, che è 0xD0. In questo caso, l'indirizzo slave di MPU6050 è 0xD0. A questo punto, quando si invia effettivamente il primo byte, se si desidera scrivere, utilizzare semplicemente 0xD0 come primo byte; se si desidera leggere, utilizzare 0xD0 o 0x01 (0xD0 | 0x01), ovvero 0xD1 come primo byte . Questa rappresentazione non richiede un'operazione di spostamento a sinistra o, in altre parole, questa rappresentazione integra i bit di lettura e scrittura nell'indirizzo dello slave. 0xD0 è l'indirizzo di scrittura e 0xD1 è l'indirizzo di lettura.
2.3 Circuito hardware
spillo
Funzione
VCC, GND
Alimentazione elettrica
SCL, SDA
Pin di comunicazione I2C
XCL, XDA
Pin di comunicazione Host I2C
Annuncio0
Il bit più basso dell'indirizzo dello slave
INTERNO
Uscita del segnale di interruzione
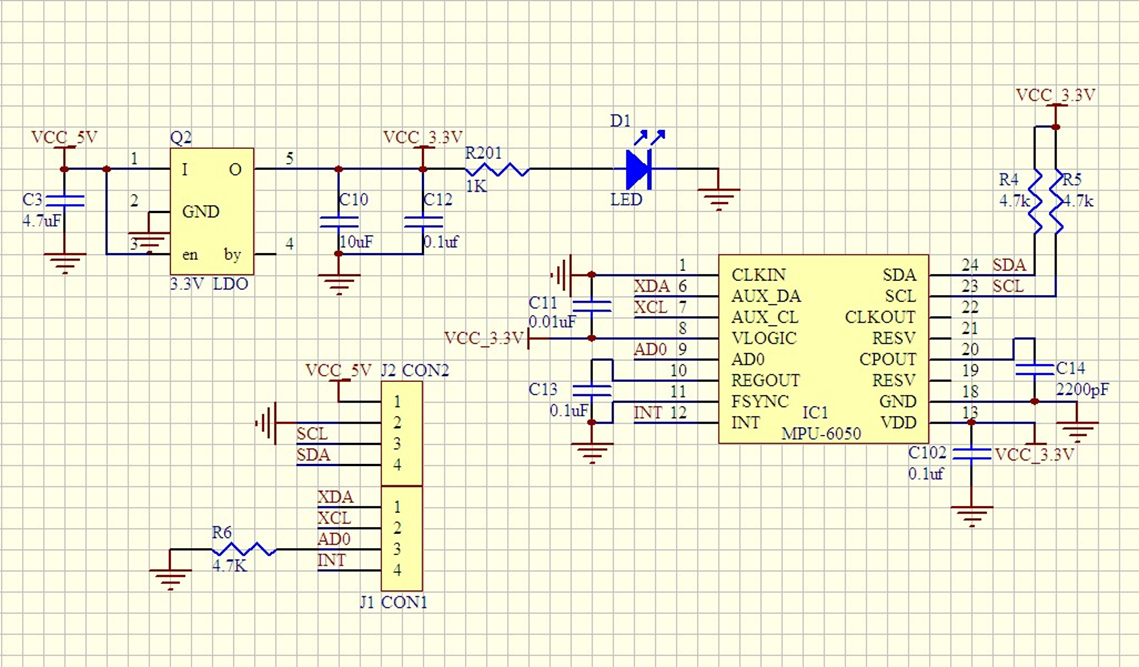
LDO: regolatore di tensione lineare a bassa caduta, regolatore di tensione 3,3 V.
SCL e SDA: sono pin di comunicazione I2C Il modulo ha due resistori pull-up integrati da 4,7K, quindi durante il cablaggio è sufficiente collegare SDA e SCL direttamente alla porta GPIO. Non è necessario collegare resistori pull-up esterni .
XCL, XDA: pin di comunicazione Host I2C Questi due pin sono progettati per espandere le funzioni del chip. Solitamente utilizzato per magnetometri o barometri esterni. Quando questi chip di espansione sono collegati, l'interfaccia host di MPU6050 può accedere direttamente ai dati di questi chip di espansione e leggere i dati di questi chip di espansione in MPU6050 dotato di un'unità DMP calcolo dell'atteggiamento. Pin AD0: è il bit più basso dell'indirizzo dello slave se è collegato a un livello basso, l'indirizzo dello slave a 7 bit è 1101000; se è collegato a un livello alto, l'indirizzo dello slave a 7 bit è 1101001; C'è un resistore nello schema elettrico, che per impostazione predefinita è debolmente abbassato al livello basso, quindi se il pin viene lasciato flottante, è a livello basso. Se vuoi collegarlo al livello alto, puoi collegare direttamente AD0 a VCC e tirarlo su con forza fino al livello alto.
INT: pin di uscita di interruzione È possibile configurare alcuni eventi all'interno del chip per attivare l'uscita del pin di interruzione, come dati pronti, errore host I2C, ecc.
Il chip dispone inoltre di: rilevamento caduta libera, rilevamento movimento, rilevamento movimento zero, ecc. Questi segnali possono attivare il pin INT per generare una transizione di livello e, se necessario, è possibile configurare i segnali di interruzione.
L'alimentazione del chip MPU6050 è 2,375-3,46 V, che è un dispositivo di alimentazione da 3,3 V e non può essere collegato direttamente a 5 V. Pertanto, viene aggiunto un regolatore di tensione da 3,3 V e la tensione del terminale di ingresso VCC_5V può essere compresa tra 3,3 V e 5 V. Quindi il regolatore di tensione da 3,3 V emette una tensione stabile da 3,3 V per alimentare il chip finché il terminale da 3,3 V è alimentato , La spia di alimentazione si accenderà.
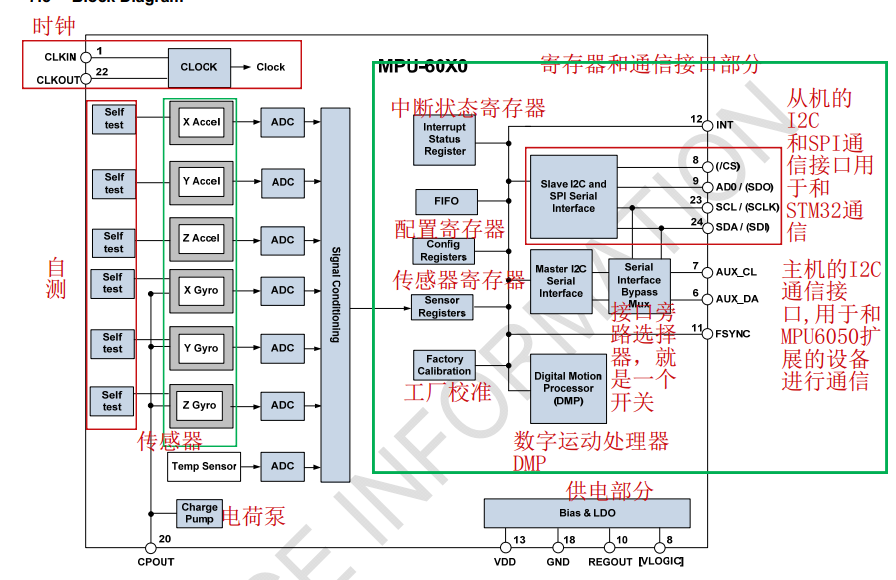
2.4 Schema a blocchi dell'MPU6050
CLKIN e CLKOUT sono pin di ingresso e uscita del clock, ma generalmente utilizziamo il clock interno.
La parte grigia: è il sensore all'interno del chip, l'accelerometro sull'asse XYZ e il giroscopio sull'asse XYZ.
C'è anche un sensore di temperatura integrato che può essere utilizzato per misurare la temperatura.
Questi sensori sono essenzialmente equivalenti a resistori variabili. Dopo aver diviso la tensione, emettono una tensione analogica e quindi eseguono la conversione da analogico a digitale attraverso l'ADC. Una volta completata la conversione, i dati provenienti da questi sensori vengono inseriti in modo uniforme nei dati registro, che può essere ottenuto leggendo il registro dati. Il valore misurato dal sensore. Tutte le conversioni all'interno di questo chip sono completamente automatizzate.
Ogni sensore ha un'unità di autotest, che viene utilizzata per verificare la qualità del chip. Quando viene avviato l'autotest, il chip simulerà una forza esterna esercitata sul sensore. Questa forza esterna farà sì che i dati del sensore vengano rilevati più grande del solito. Processo di autotest: è possibile abilitare prima l'autotest, leggere i dati, quindi abilitare l'autotest, leggere i dati, sottrarre i due dati e i dati risultanti vengono chiamati risposta all'autotest. Per questa risposta di autotest, il manuale fornisce un intervallo. Se rientra in questo intervallo, significa che non ci sono problemi con il chip.
Pompa di carica: è una pompa di carica o pompa di carica. La pompa di carica è un circuito di boost.
Il pin CPOUT richiede un condensatore esterno.
Registro dello stato di interruzione: può controllare quali eventi interni vengono inviati al pin di interruzione,
FIFO: registro first-in-first-out, che può memorizzare nella cache il flusso di dati.
Registro di configurazione: è possibile configurare vari circuiti interni
Registro sensori: registro dati, che memorizza i dati di ciascun sensore.
Calibrato in fabbrica: ciò significa che i sensori interni sono calibrati.
Processore di movimento digitale: DMP in breve, è un algoritmo hardware per il calcolo dell'assetto integrato nel chip. Può essere utilizzato per il calcolo dell'assetto con la libreria DMP ufficiale.
FSYNC: sincronizzazione dei frame.
3. 10-1 Software I2C di lettura e scrittura MPU6050
3.1 Collegamento hardware
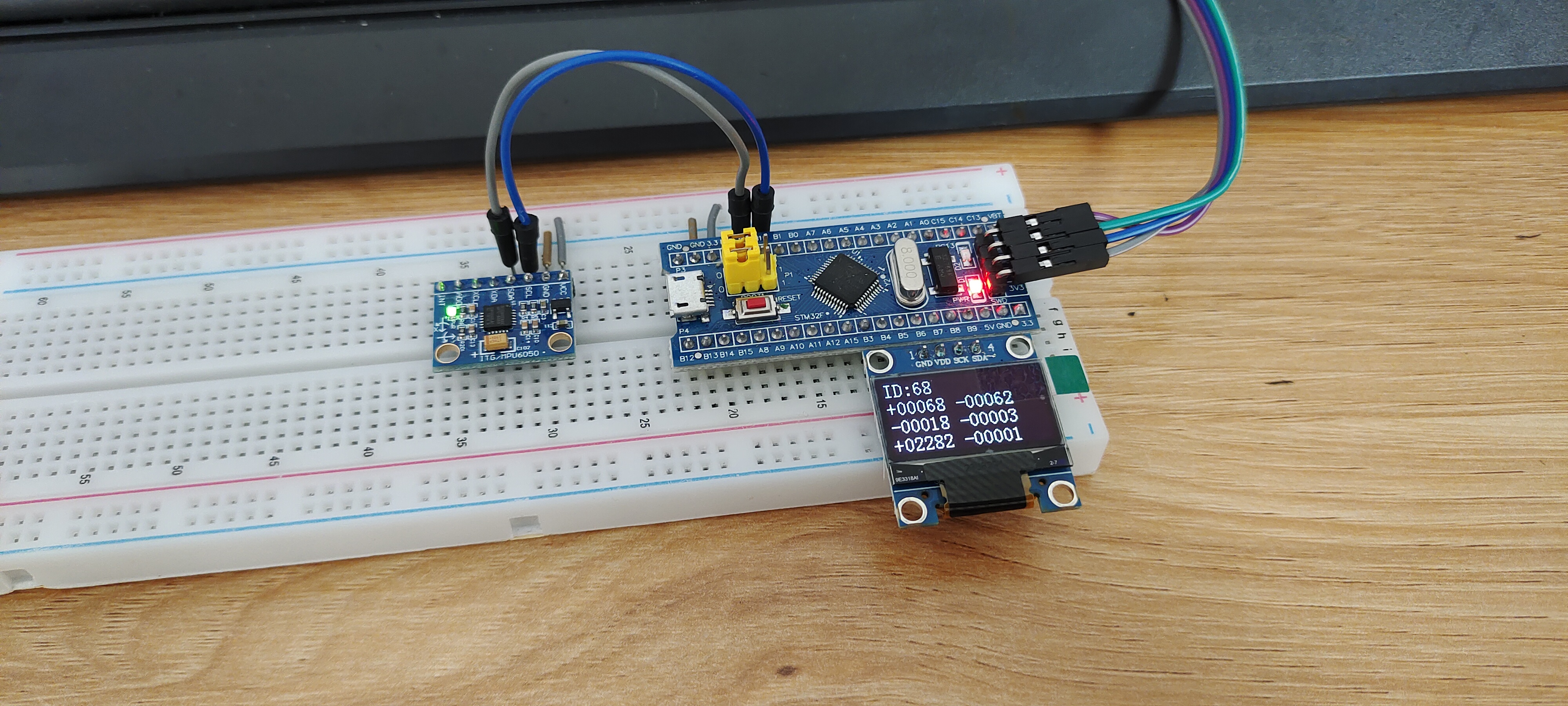
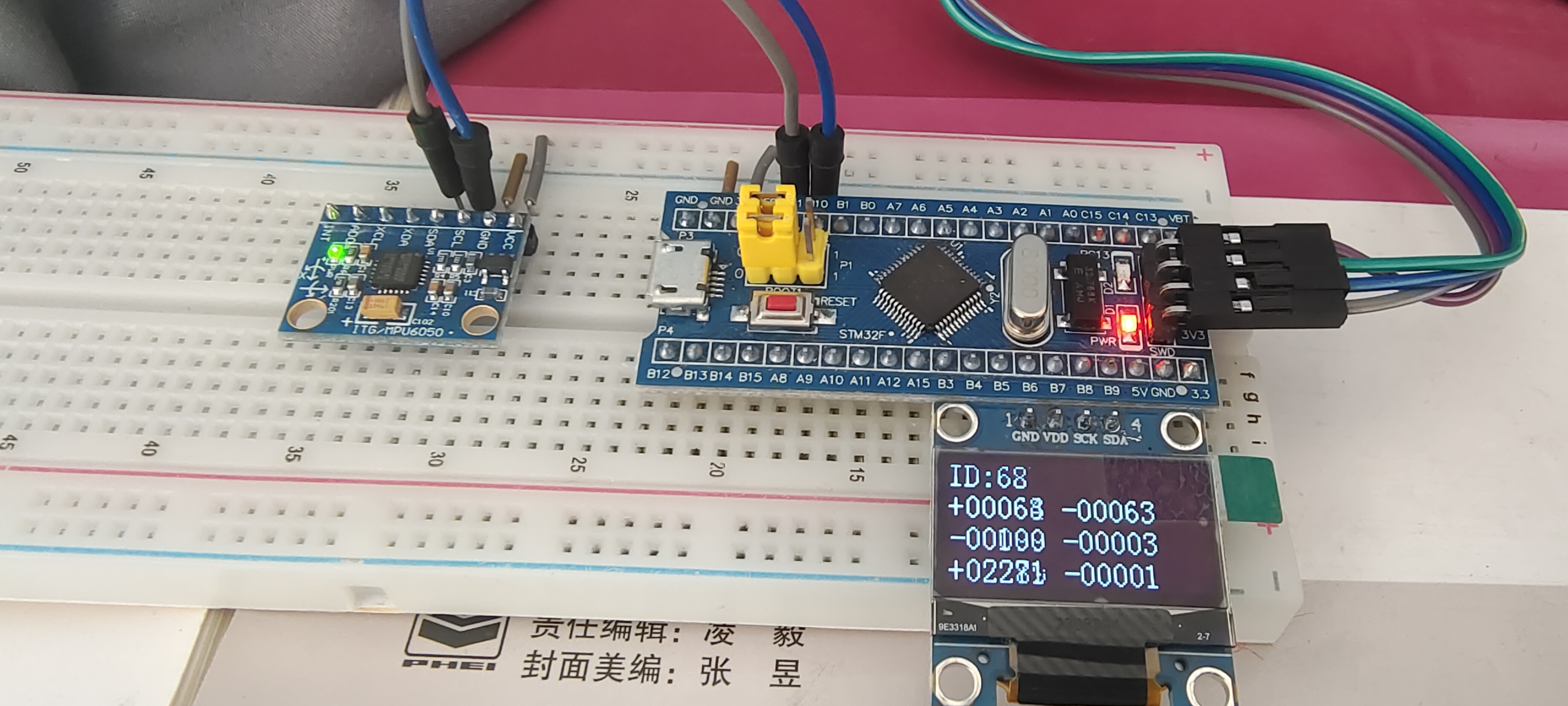
Attraverso la comunicazione I2C del software, leggere e scrivere i registri all'interno del chip MPU6050. Scrivendo nel registro di configurazione, è possibile configurare il modulo plug-in. Leggendo il registro dati, è possibile ottenere i dati del modulo plug-in verranno visualizzati i dati letti. Sull'OLED, i dati in alto sono il numero ID del dispositivo. Il numero ID di questo MPU6050 è fisso su 0x68. Sotto, i tre a sinistra sono i dati di output del sensore di accelerazione, che sono rispettivamente l'accelerazione dell'asse X, dell'asse Y e dell'asse Z. I tre a destra sono i dati di output del sensore giroscopico. che sono la velocità angolare dell'asse X, dell'asse Y e dell'asse Z. SCL è collegato al pin PB10 di STM32 e SDA è collegato al pin PB11. Poiché qui è implementato il ribaltamento a livello software, è possibile collegare due porte GPIO a piacimento.
3.2 Risultati dell'operazione
3.3 Flusso del codice
STM32 è l'host e MPU6050 è lo slave, che è una modalità master-slave.
Stabilire i moduli .c e .h del livello di comunicazione I2C
Scrivi l'inizializzazione GPIO sottostante di I2C
6 unità di temporizzazione di base: inizio, fine, invia un byte, ricevi un byte, invia risposta, ricevi risposta
Creare i moduli .c e .h di MPU6050
Basato sul modulo di comunicazione I2C, implementa la lettura all'indirizzo specificato, la scrittura all'indirizzo specificato, la scrittura dei registri per configurare il chip e la lettura dei registri per ottenere i dati del sensore.
principale.c
Richiama il modulo MPU6050, inizializza, ottieni i dati e visualizza i dati
STM32 integra un circuito ricetrasmettitore hardware I2C, che può eseguire automaticamente funzioni quali generazione di clock, generazione di condizioni di inizio e fine, trasmissione e ricezione di bit di risposta e trasmissione e ricezione di dati da parte dell'hardware, riducendo il carico sulla CPU.
Supporta il modello multi-host
Supporta la modalità indirizzo a 7 bit/10 bit
Supporta diverse velocità di comunicazione, velocità standard (fino a 100 kHz), veloce (fino a 400 kHz)
Supporta DMA
Compatibile con il protocollo SMBus
Risorse hardware I2C STM32F103C8T6: I2C1, I2C2
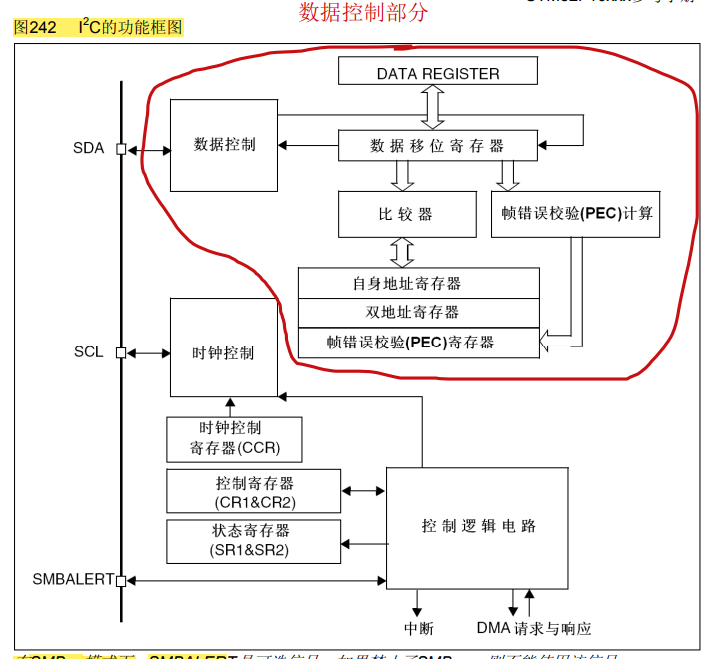
4.2 Schema a blocchi I2C
A sinistra ci sono i pin di comunicazione: SDA e SCL sono utilizzati da SMBus; I pin derivati dalle periferiche generiche sono solitamente collegati al mondo esterno attraverso la modalità multiplexing della porta GPIO (vedi tabella)
Quanto sopra è la parte di controllo dei dati: SDA La parte centrale della trasmissione e della ricezione dei dati è il registro dati DR (DATA REGISTER) e il registro a scorrimento dei dati. Quando i dati devono essere inviati, un byte di dati può essere scritto nel registro dati DR. Quando il registro a scorrimento non ha dati da spostare, il valore del registro dati verrà ulteriormente trasferito al registro a scorrimento. Durante il processo di spostamento, i dati successivi possono essere inseriti direttamente nel registro dati e attesi. Una volta completato lo spostamento dei dati precedente, i dati successivi possono essere collegati senza problemi e continuare a essere inviati. Quando i dati vengono trasferiti dal registro dati al registro a scorrimento, il bit TXE del registro di stato viene impostato a 1, indicando che il registro di trasmissione è vuoto.
Ricezione: i dati di ingresso vengono spostati dal pin al registro a scorrimento bit per bit. Quando viene raccolto un byte di dati, i dati vengono trasferiti dal registro a scorrimento al registro dati nel suo complesso e il flag RXNE viene impostato su. contemporaneamente, indicando la ricezione. Il registro non è vuoto, i dati possono essere letti dal registro dati. Per quanto riguarda quando ricevere e quando inviare, è necessario scrivere i bit corrispondenti nel registro di controllo per il funzionamento. Le condizioni di avvio, le condizioni di terminazione, i bit di risposta, ecc. vengono completati tramite il controllo dei dati.
Il comparatore e il registro degli indirizzi vengono utilizzati in modalità slave.
SCL: il controllo dell'orologio viene utilizzato per controllare la linea SCL. Scrivi il bit corrispondente nel registro di controllo dell'orologio e il circuito eseguirà la funzione corrispondente. Circuito logico di controllo, la scrittura nel registro di controllo può controllare l'intero circuito. Lo stato di funzionamento del circuito può essere conosciuto leggendo il registro di stato.
Quando si inviano e ricevono molti byte, è possibile utilizzare DMA per migliorare l'efficienza.
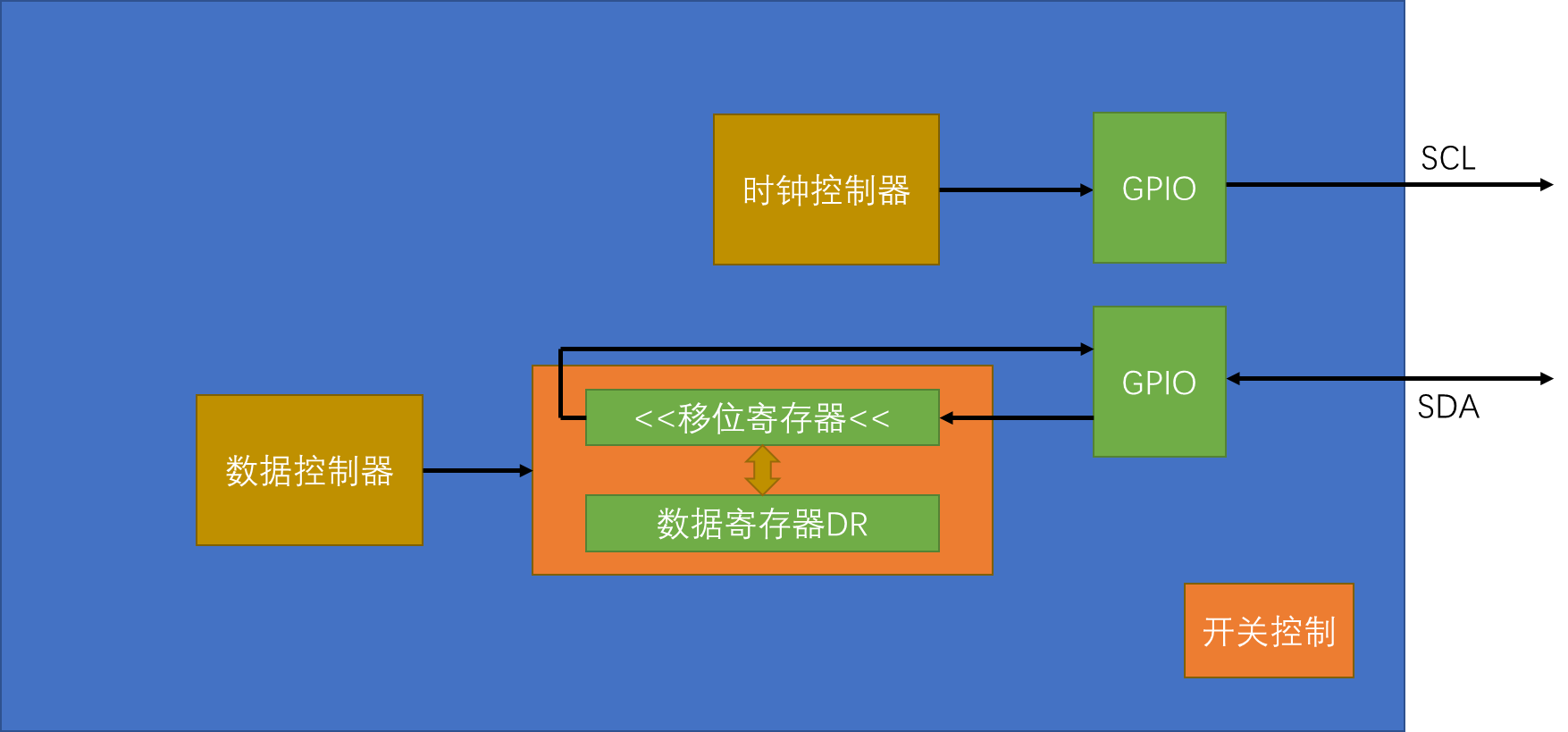
4.3 Struttura base I2C
SDA: poiché I2C è il primo di ordine superiore, questo registro a scorrimento si sposta a sinistra. Durante l'invio viene spostato prima il bit alto, poi il secondo bit alto. Un clock SCL viene spostato una volta e poi spostato 8 volte e 8 byte possono essere posizionati sulla linea SDA dal bit alto al bit basso. Durante la ricezione, i dati vengono spostati da destra attraverso la porta GPIO e infine viene ricevuto un byte per 8 volte. I dati di output vengono inviati alla porta tramite la porta GPIO. I dati di input vengono immessi nel registro a scorrimento tramite la porta GPIO.
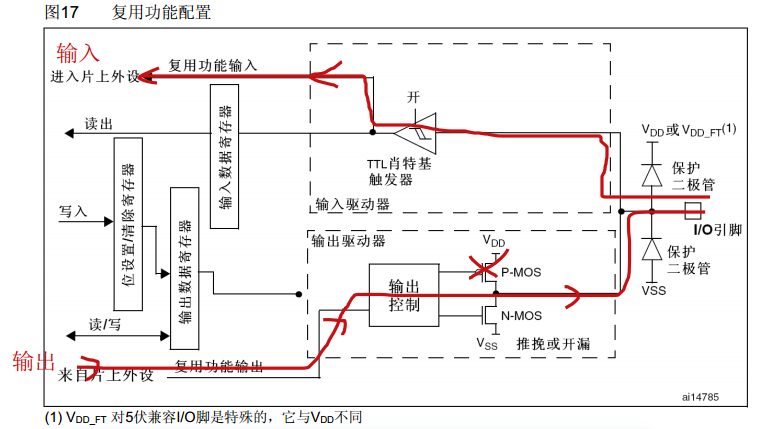
La porta GPIO deve essere configurata per la modalità di uscita multiplex a drain aperto. Multiplexing significa che lo stato della porta GPIO è controllato da periferiche su chip e l'uscita a drain aperto è la configurazione della porta richiesta dal protocollo I2C. Anche in modalità di output open-drain, è possibile inserire la porta GPIO.
SCL: il controller dell'orologio controlla la linea dell'orologio tramite GPIO.
4.4 L'host invia
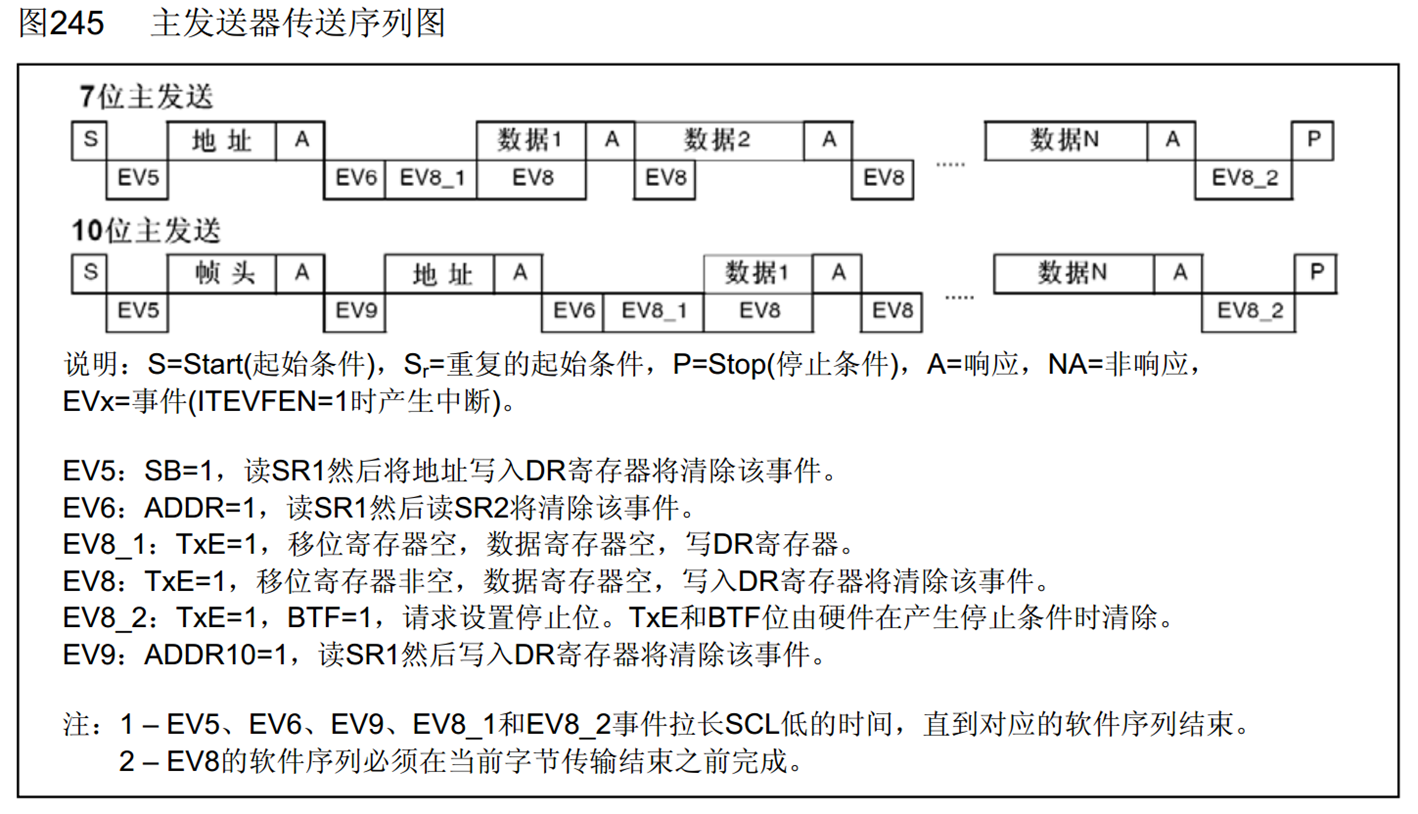
Quando STM32 desidera scrivere a un indirizzo specificato, deve seguire il diagramma della sequenza di trasmissione del trasmettitore.
Indirizzo a 7 bit: il byte successivo all'indirizzamento della condizione di avvio
Indirizzo a 10 bit: i due byte dopo la condizione di avvio vengono indirizzati. Il primo byte è l'intestazione del frame e il contenuto è il bit flag a 5 bit 11110 + indirizzo a 2 bit + 1 bit di lettura-scrittura è il byte successivo Indirizzo puro a 8 bit.
Processo a 7 bit: avvio, indirizzo slave, risposta, dati, risposta, dati, risposta... Stop
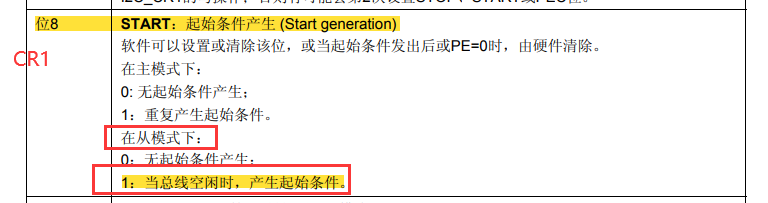
Dopo l'inizializzazione, il bus passa allo stato inattivo e STM passa alla modalità slave. Per generare una condizione di avvio, STM32 deve scrivere nel registro di controllo (CR1), scrivere 1, quindi STM32 passa dalla modalità slave alla modalità master. .
L'evento EV5 può essere considerato un bit di flag. SB è un bit del registro di stato, indica lo stato dell'hardware. SB=1 significa che la condizione di avvio è stata inviata.
Quindi è possibile inviare un byte dell'indirizzo dello slave. L'indirizzo dello slave deve essere scritto nel registro dati DR. Dopo aver scritto nel DR, il circuito hardware trasferirà automaticamente il byte dell'indirizzo nel registro a scorrimento, quindi trasferirà la parola Il nodo è inviato al bus I2C, quindi l'hardware riceverà automaticamente la risposta e giudicherà se non c'è risposta, l'hardware imposterà il flag di errore di risposta, quindi il flag potrà richiedere un'interruzione per ricordarcelo.
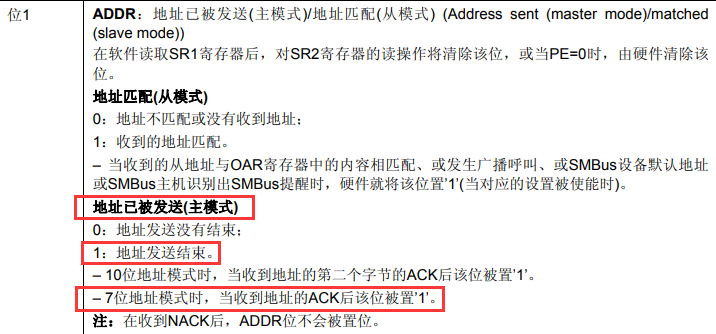
Una volta completato l'indirizzamento, si verificherà l'evento EV6 e il bit del flag ADDR sarà 1. Questo bit del flag indica la fine della trasmissione dell'indirizzo in modalità master.
L'evento EV8_1 significa che il flag TxE è 1, il registro a scorrimento è vuoto e il registro dati è vuoto. Dobbiamo scrivere nel registro dati DR per inviare i dati. Dopo aver scritto a DR, poiché il registro a scorrimento è vuoto, DR passerà immediatamente al registro a scorrimento per inviare. Si verificherà l'evento EV8. Il registro a scorrimento non è vuoto e il registro dati è vuoto, il che significa che il registro a scorrimento sta inviando dati. Pertanto, nel processo viene generata la temporizzazione dei dati 1. In questo momento, i dati 2 verranno scritti nel registro dati e saranno in attesa. Dopo aver ricevuto il bit di risposta, i bit di dati verranno trasferiti al registro a scorrimento per la trasmissione. Lo stato in questo momento è che il registro a scorrimento non è vuoto e il registro dei dati è vuoto, quindi in questo momento l'incidente dell'EV8 si è verificato di nuovo.
Quindi viene inviato il dato 2, ma questa volta il dato successivo è stato scritto nel registro dati ed è in attesa. Una volta rilevato l'evento EV8, è possibile scrivere i dati successivi.
Dopo che i dati che si desidera inviare sono stati scritti, non vengono scritti nuovi dati nel registro dati. Quando lo spostamento dei dati corrente nel registro a scorrimento è completato, il registro a scorrimento è vuoto e anche il registro dati è vuoto, ovvero. Evento EV8_2, TxE=1 significa che il registro a scorrimento è vuoto, il registro dati è vuoto, BTF: flag di fine trasmissione byte, durante la trasmissione, quando verranno inviati nuovi dati e il registro dati non è stato scritto con nuovi dati. Quando viene rilevato EV8_2, è possibile generare la condizione di terminazione Stop. Per generare una condizione di terminazione, ovviamente, dovrebbero esserci dei bit corrispondenti nel registro di controllo che possono essere controllati. In questo modo la sequenza di invio è terminata.
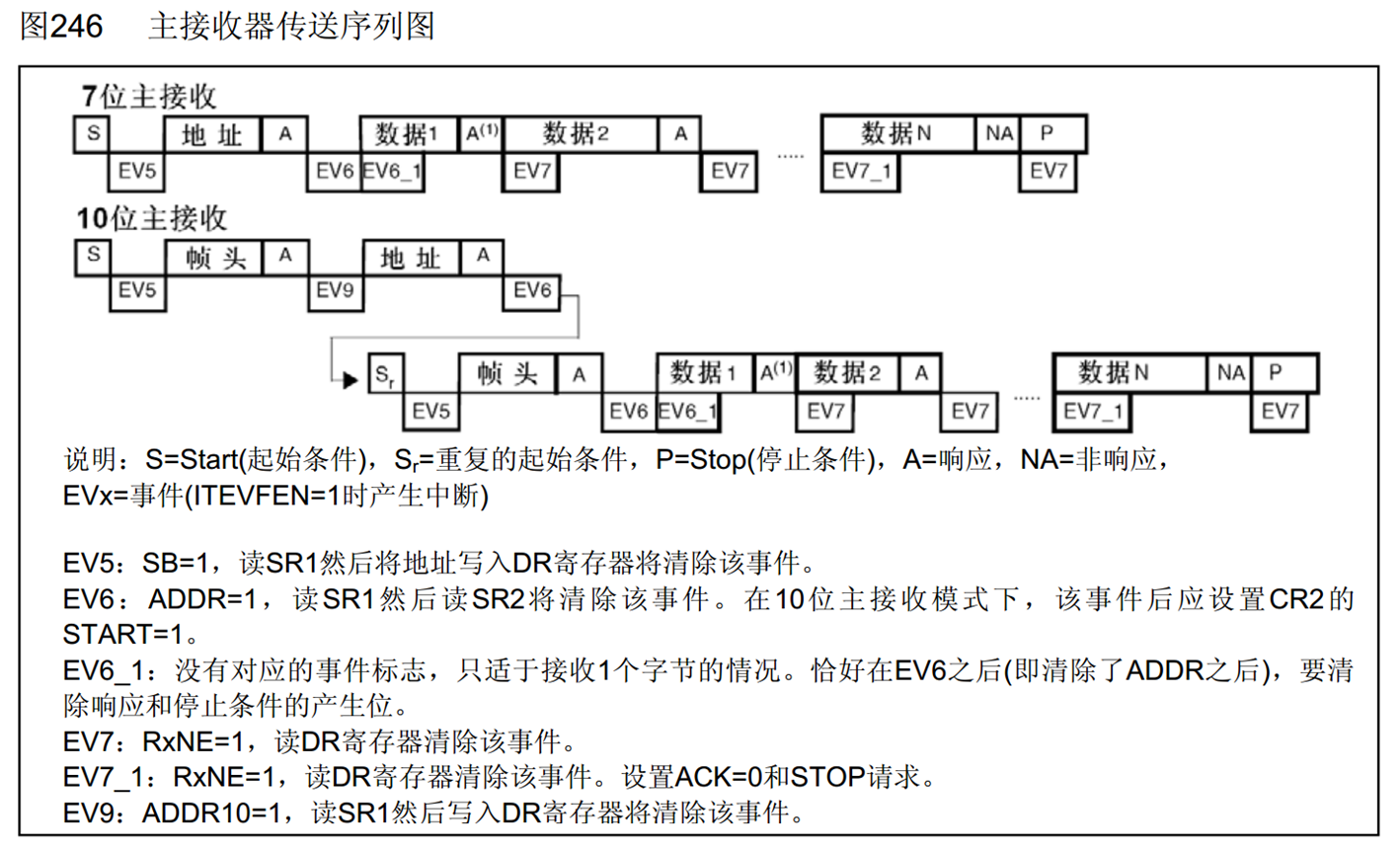
Innanzitutto, scrivere il bit Start del registro di controllo per generare una condizione di avvio, quindi attendere l'evento EV5 (che indica che la condizione di avvio è stata inviata).
Dopo l'indirizzamento viene ricevuta la risposta e al termine viene generato un evento EV6 (che indica che l'indirizzamento è completato).
Dati 1 significa che i dati vengono immessi tramite il registro a scorrimento.
EV6_1 indica che i dati sono ancora in fase di spostamento Dopo aver ricevuto la risposta, significa che il registro a scorrimento è stato spostato con successo in un byte di dati 1. In questo momento, il byte spostato viene trasferito nel registro dati nel suo insieme e. contemporaneamente viene impostato il flag RxNE, che indica che il registro dati non è vuoto, ovvero è stato ricevuto un byte di dati, lo stato è un evento EV7, RxNE=1 che i dati sono stati ricevuti Dopo aver letto i dati, l'evento non c'è più.
Naturalmente, quando i dati 1 non sono stati letti, i dati 2 possono essere spostati direttamente nel registro a scorrimento. Successivamente, lo spostamento dei dati 2 viene completato, i dati 2 vengono ricevuti, viene generato un evento EV7, i dati 2 vengono letti e. l'evento EV7 è scomparso.
Quando non è più necessaria alcuna ricezione, il registro di controllo del bit di risposta ACK deve essere impostato a 0 in anticipo quando si verifica l'ultima unità di temporizzazione e viene impostata la richiesta della condizione di terminazione, ovvero l'evento EV7_1 Successivamente, una mancata risposta NA verrà fornito Poiché il bit STOP è impostato, viene generata una condizione di terminazione.
4.6 Confronto delle forme d'onda software/hardware
5.2 Hardware I2C lettura e scrittura Implementazione MPU6050
5.2.1 Collegamento hardware
SCL è collegato al pin PB10 di STM32 e SDA è collegato al pin PB11. Poiché qui è implementato il ribaltamento a livello software, è possibile collegare due porte GPIO a piacimento. I dati principali di OLED sono il numero ID del dispositivo. Il numero ID di questo MPU6050 è fissato su 0x68. Sotto, i tre a sinistra sono i dati di output del sensore di accelerazione, che sono rispettivamente l'accelerazione dell'asse X, dell'asse Y e dell'asse Z. I tre a destra sono i dati di output del sensore giroscopico. che sono la velocità angolare dell'asse X, dell'asse Y e dell'asse Z.
5.2.2 Risultati dell'operazione
5.2.3 Processo di implementazione del codice
Configura le periferiche I2C, inizializza le periferiche I2C, sostituisci MyI2C_Init (1) Accendere l'orologio della periferica I2C e la porta GPIO corrispondente, (2) Inizializzare la porta GPIO corrispondente alla periferica I2C in modalità multiplexed open-drain (3) Utilizzare la struttura per configurare l'intero I2C (4) I2C_Cmd, abilita I2C
Controlla i circuiti periferici, realizza i tempi di scrittura sugli indirizzi specificati e sostituisce WriteReg
Controllare il circuito periferico per realizzare i tempi di lettura dell'indirizzo specificato e sostituire ReadReg