2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
This design carefully builds a comprehensive embedded system with STM32MP157A high-performance single-chip microcomputer as the core control unit. The system cleverly integrates multiple peripheral modules such as buzzer, digital tube display, dot matrix screen, temperature and humidity sensor, LED indicator light and button to form a hybrid intelligent device with rich functions and convenient operation. Through serial communication, users can flexibly switch the working mode of the system and easily realize basic functions such as alarm clock, music box playback and temperature and humidity monitoring and control.
Core Hardware
software platform
System Function Highlights
Flexible mode switching: Through serial port communication, users can easily switch between the three modes of alarm clock, music box playback and temperature and humidity monitoring to meet the usage needs in different scenarios.
Dynamic information display:The dot matrix screen serves as the information display window of the system. It can display the corresponding Chinese characters according to the current working mode (such as "钟" represents the alarm clock mode, "音" represents the music box mode, and "传" can be regarded as a simplified symbol for temperature and humidity monitoring), providing users with intuitive operation feedback.
Key interaction experience:The design fully considers the user's interactive experience. The corresponding functional operations can be performed in each mode by pressing buttons, such as adjusting the speed and volume of the music box, switching songs, pause/play control, as well as adjusting the alarm time, setting multiple alarms, turning off the alarm, etc.
Intelligent temperature and humidity control:The system has a built-in temperature and humidity sensor that can monitor environmental conditions in real time and receive user instructions through the serial port to adjust the upper and lower thresholds of temperature and humidity. Once the environmental parameters exceed the set range, the LED indicator will light up as a boundary prompt to help users take timely measures.
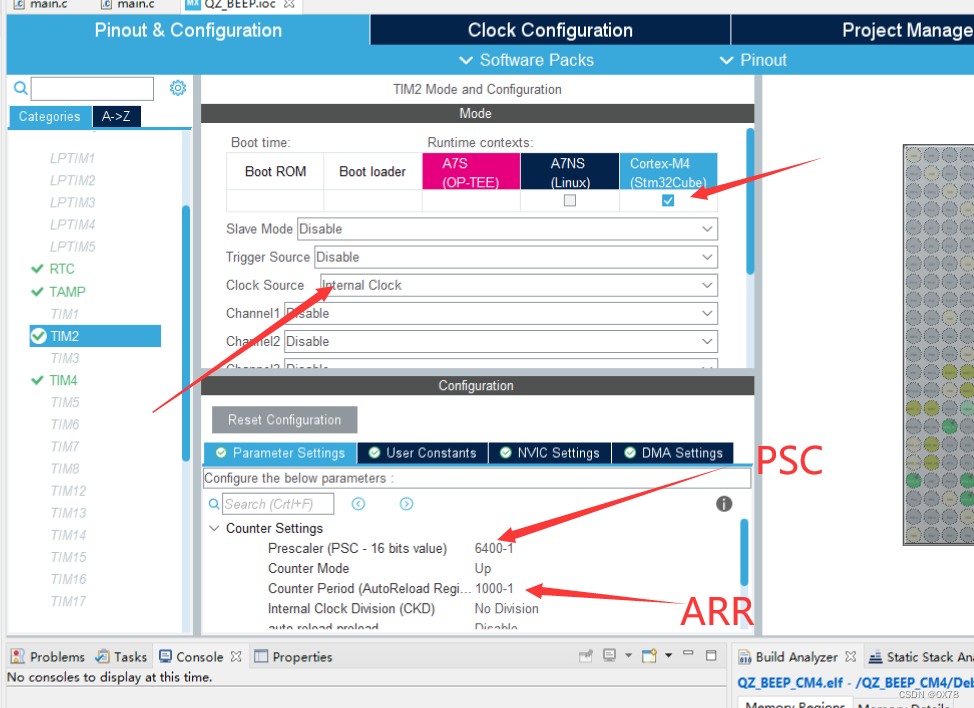
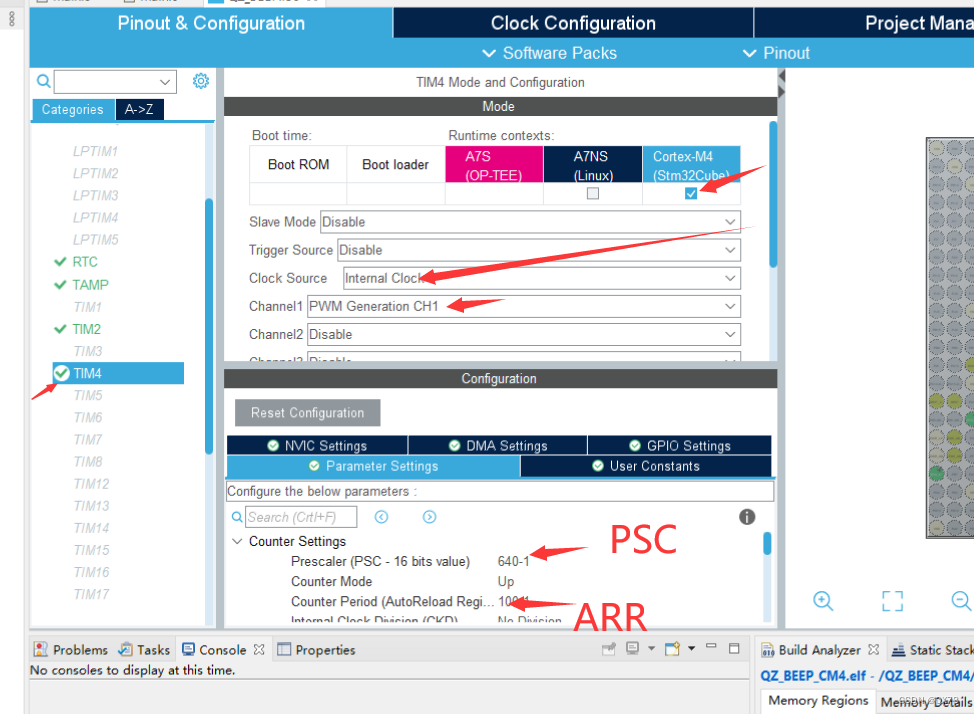
The music box has been made before so the configuration does not change:STM32 Music Box


Note the pins





The music box has been written before, so I will not repeat the previous operations here. We will add the serial port and mode conversion.
-
- //串口音乐控制函数
- void music_kz(){
- if(EN_music == 1)//启动
- play_music(list,Low_volume);
- else
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
-
-
-
- if(strcmp("music volume increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 10;
- }
-
- if(strcmp("music volume reduction",(char *)uart4_data)==0){
- Low_volume = Low_volume - Low_volume_cnt;
- if(Low_volume <= 0)
- Low_volume = 0;
- }
-
-
- if(strcmp("music speed increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
- if(strcmp("music speed reduction",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i--;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(strcmp("music next song",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- list++;
- if(list > list_max){
- list = list_max;
- }
- }
- if(strcmp("music previous song",(char *)uart4_data)==0){
- list--;
- uart4_data[0] = '0';
- if(list < 0){
- list = 0;
- }
- }
-
- if(strcmp("music start",(char *)uart4_data)==0){
- EN_music = 1;
- }
- if(strcmp("music stop",(char *)uart4_data)==0){
- EN_music = 0;
- }
-
-
- }
The mode variable is used to represent the mode, and the same applies to the next three buttons.
-
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- void uart_mode(){
-
- if(strcmp("mode = music",(char *)uart4_data)==0){
- mode = 0;
- }
- if(strcmp("mode = clock",(char *)uart4_data)==0){
- mode = 1;
- }
- if(strcmp("mode = sensor",(char *)uart4_data)==0){
- mode = 2;
- }
- }
-
- uint8_t DZP_data[6][34]={
- {0xAA,0x55,
- 0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
- 0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//音
-
- {0xAA,0x55,
- 0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
- 0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//钟//1//
-
- {0xAA,0x55,
- 0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
- 0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//传//2//
-
- };
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
main.c
-
- //数码管闹钟基础变量
- extern int buf[8];
- extern int shi_shi;
- extern int shi_ge ;
- extern int fen_shi;
- extern int fen_ge ;
- extern int miao_shi ;
- extern int miao_ge ;
-
- extern int miao ;
- extern int shi ;
- extern int fen;
- //闹钟保存数组
- extern int alarm_clock_array[20][4];
- extern int alarm_clock_array_cnt;
stm32mp1xx_it.c basic variables
-
-
- //数码管闹钟基础设置
- int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
- int buf[8] = {0};
-
- //闹钟保存数组
- int alarm_clock_array[20][4] = {0};
- int alarm_clock_array_cnt = 0;
- //实时时钟信息
- int shi_shi = 0;
- int shi_ge = 0;
- int fen_shi = 0;
- int fen_ge = 0;
- int miao_shi = 0;
- int miao_ge = 0;
- int miao = 0;
- int shi = 0;
- int fen = 0;
-
- int EN_clock = 0;//闹钟设置使能
- extern int en_clock;//用于控制闹钟响铃
-
- //闹钟设置信息
- int shi_shi_clock = 0;
- int shi_ge_clock = 0;
- int fen_shi_clock = 0;
- int fen_ge_clock = 0;
- int miao_shi_clock = 0;
- int miao_ge_clock = 0;
- int miao_clock = 0, shi_clock = 0, fen_clock = 0;
-
- void TIM2_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM2_IRQn 0 */
- if(EN_music == 1)
- time_100ms_cnt++;
- else
- time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
-
- if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
- time_100ms_cnt = 0;
- flag = 1; //发�?�音节结束信�???????
- }
-
-
- //数码�????
- static int smg_time_100ms = 0;
- smg_time_100ms++;
- if(smg_time_100ms>=10){
- miao++;
- smg_time_100ms = 0;
- }
-
-
- if (miao>=60)
- {
- miao=0;
- fen++;
- if(fen>=60)
- {
- fen=0;
- shi++;
- if(shi>=24)
- {
- shi=0;
- }
- }
- }
-
-
- if(miao >= 60){
- miao = miao-60;
- fen++;
- }
- if(fen>=60){
- fen = fen-60;
- shi ++;
- }
- if(shi>= 24){
- shi = shi -24;
-
- }
-
-
- miao_shi=miao/10;
- miao_ge=miao%10;
-
- fen_shi=fen/10;
- fen_ge=fen%10;
-
- shi_shi=shi/10;
- shi_ge=shi%10;
-
-
- if(EN_clock == 0){
- buf[0]=smg_number[shi_shi];
- buf[1]=smg_number[shi_ge];
- buf[3]=smg_number[fen_shi];
- buf[4]=smg_number[fen_ge];
- buf[6]=smg_number[miao_shi];
- buf[7]=smg_number[miao_ge];
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
- }
-
- /* USER CODE END TIM2_IRQn 0 */
- HAL_TIM_IRQHandler(&htim2);
- /* USER CODE BEGIN TIM2_IRQn 1 */
-
- /* USER CODE END TIM2_IRQn 1 */
- }
-
- void EXTI9_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI9_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
- EN_music = !EN_music;
- }
-
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
- if(EN_clock == 1){
- //闹钟设置成功
- alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
- alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
- alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
- alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
- alarm_clock_array_cnt++;
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- EN_clock = 0;
- }
- else if(EN_clock == 0){
- //设置闹钟
- shi_shi_clock = shi_shi;
- shi_ge_clock = shi_ge;
- fen_shi_clock = fen_shi;
- fen_ge_clock = fen_ge;
- miao_shi_clock = 0;
- miao_ge_clock = 0;
- miao_clock = 0;
- shi_clock = shi;
- fen_clock = fen;
- EN_clock = 1;
- }
- }
-
-
-
-
-
-
- /* USER CODE END EXTI9_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
- /* USER CODE BEGIN EXTI9_IRQn 1 */
-
- /* USER CODE END EXTI9_IRQn 1 */
- }
-
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line1 interrupt.
- */
- void EXTI1_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI1_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
- {
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
- fen_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- if(fen_clock>=60)
- {
- fen_clock=0;
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI1_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
- /* USER CODE BEGIN EXTI1_IRQn 1 */
-
- /* USER CODE END EXTI1_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line2 interrupt.
- */
- void EXTI2_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI2_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
- {
- list++;
- if(list > list_max){
- list = 0;
- }
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
- //在此处关闭闹�????
- en_clock = 0;
- }
- /* USER CODE END EXTI2_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
- /* USER CODE BEGIN EXTI2_IRQn 1 */
-
- /* USER CODE END EXTI2_IRQn 1 */
- }
- //通过输入不同的n,返回shi fen miao
- int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
-
- time_miao = time_miao + add_miao;
- time_fen = time_fen + time_miao/60;
- time_miao = time_miao % 60;
-
- time_fen = time_fen + add_fen;
- time_shi = time_shi + time_fen / 60;
- time_fen = time_fen%60;
-
- time_shi = time_shi + add_shi;
- time_shi = time_shi%24;
-
- if(n == 0) return time_shi;
- if(n == 1) return time_fen;
- if(n == 2) return time_miao;
-
- return -1;
- }
-
- // 函数定义:从字符串中提取两位数字
- int extract_two_digits(const char *str, const char *prefix, int *value) {
- char *pos = strstr(str, prefix); // 查找前缀的位�?????
- if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
-
- // 跳过前缀的长度,找到数字�?????始的位置
- pos += strlen(prefix);
-
- // �?????查接下来的两个字符是否是数字
- if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
- // 转换字符为数�?????
- *value = (pos[0] - '0') * 10 + (pos[1] - '0');
- return 1; // 成功提取,返�?????1
- }
-
- return 0; // 提取失败,返�?????0
- }
-
- //判断是否到底闹钟
- int en_clock = 0;//用于控制闹钟响铃
- int en_clock_cnt = 0;
- int clock_end[3] = {0};//记录闹钟无人时关闭的时间
- //串口设置闹钟
- void uart_clock(){
- int ci = 0;
- int ci_n = 0;
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
-
- ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- shi = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- fen = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- miao = ci_n;
- }
-
- //设置�?????个多少时间后的闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
- alarm_clock_array_cnt++;
- }
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
- alarm_clock_array_cnt++;
- }
-
- ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
- alarm_clock_array_cnt++;
- }
-
- // time shi = 12;fen = 10;miao = 12;music = 1;
- ci = 0;
- ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
- ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
- ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- //ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- if(ci == 3){
- //完美对应
- uart4_data[0] = '1';
- ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
- if(ci > list_max && ci<0) //如果大于音乐总数
- alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
-
- alarm_clock_array_cnt++;
- }
-
-
- if(strcmp("clock delay list",(char *)uart4_data)==0){
-
- uart4_data[0] = '0';
- for(int i = 0; i< alarm_clock_array_cnt;i++){
- if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
- printf("%d : time -> %d/%d/%d rn",i, alarm_clock_array[i][0],
- alarm_clock_array[i][1],
- alarm_clock_array[i][2]
- );
- }
- }
-
- //读取关闭第几位闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
- if(ci == 1){
- alarm_clock_array[ci_n][0] = -1;
- alarm_clock_array[ci_n][1] = -1;
- alarm_clock_array[ci_n][2] = -1;
- }
-
- //关闭闹钟
- if(strcmp("clock stop stop",(char *)uart4_data)==0){
- en_clock = 0;
- }
-
-
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- }
-
- void alarm_clock(){
- //时钟显示(数码管)
- static int pos = 0;
- HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
- HAL_Delay(1);
- pos++;
- if(pos == 3 && pos == 6) pos++;
- if(pos == 8) pos = 0;
-
-
- uart_clock();//调用串口控制
-
- for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
- //int cnt_clock = 0;
- if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
- en_clock_cnt = j;
- en_clock = 1;
- clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
- clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
- clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
- break;
- }
- }
-
- //当闹钟响�?????30S
- if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
- en_clock = 0;//关闭闹钟
- //EN_music = 1;
- }
-
- if(en_clock == 1 ){
- motor(10);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- }
-
- }
-
- uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
- //0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
- uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
- uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
-
- int humidity_min = 50;//能仍受最低干燥程度
- int temperature_max = 50;//能仍受的最高温度
- int en_t = 0; //温度使能
- int en_r = 0; //湿度使能
-
- //计算出温湿度
- void Temperature_humidity(){
- //湿度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
- //写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
- //读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
- HAL_Delay(30);
- //进行高低字节转换
- RH_Code_low=(RH_Code & 0xff);
- RH_Code_high=(RH_Code >> 8)& 0xff;
- RH_Code=(RH_Code_low << 8)+RH_Code_high;
-
- //温度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
- //读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
- HAL_Delay(30);
- //进行高低字节转换
- Temp_Code_low=(Temp_Code & 0xff);
- Temp_Code_high=(Temp_Code >> 8)& 0xff;
- Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
-
- Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
- RH_Code=125*RH_Code/65536-6;//计算出湿度�??
- //printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- //串口输出温湿�???????
- HAL_Delay(2);
- }
-
- void uart_sensor(){
- int tr=0;
- int tr_i = 0;
- tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
- if(tr != 0){
- humidity_min = tr_i;
- }
-
- tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
- if(tr != 0){
- temperature_max = tr_i;
- }
-
-
- if(strcmp("sensor temperature start",(char *)uart4_data)==0){
- en_t = 1;
- }
- if(strcmp("sensor humidity start",(char *)uart4_data)==0){
- en_r = 1;
- }
- if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
- en_t = 0;
- }
- if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
- en_r = 0;
- }
-
-
- if(strcmp("sensor list",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%rn",Temp_Code/100,Temp_Code%100,RH_Code%100);
- printf("sensor en_t : %drn",en_t);
- printf("sensor en_r : %drn",en_r);
- printf("sensor temperature_max : %drn",temperature_max);
- printf("sensor humidity_min : %drn",humidity_min);
- }
-
- if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- }
-
-
- }
-
- void sensor(){
- static int iii = 0;
- if(iii == 0){
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
- HAL_Delay(2);
- iii++;
- }
- Temperature_humidity();
- uart_sensor();
-
- if(RH_Code < humidity_min && en_r == 1){
- //motor(10);
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
- }
-
- if(Temp_Code/100 >= temperature_max && en_t == 1){
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
- }
- }
-
- void end_main(){
-
- tone_init(); //初始化音量频�??????
- list_max = music_init();//更新乐谱
- HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
- HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
- HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
-
- //1 使能串口空闲中断
- __HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
- //2.使能串口中断接收数据
- HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
- int mode_n = 1;
-
- while(1){
- music_kz();
-
- alarm_clock();
- uart_mode();
-
- sensor();
-
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
-
- }
- }
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2024 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
-
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
-
-
- #include <string.h>
-
-
- uint8_t rx_buf[200]={0}; //接收不定长数
- uint8_t uart4_data[200] = {0};
-
- extern int mode; //模式
- /* USER CODE END Includes */
-
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
-
- /* USER CODE END PTD */
-
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
-
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
-
- /* USER CODE END PM */
-
- /* Private variables ---------------------------------------------------------*/
- I2C_HandleTypeDef hi2c1;
-
- TIM_HandleTypeDef htim2;
- TIM_HandleTypeDef htim3;
- TIM_HandleTypeDef htim4;
-
- UART_HandleTypeDef huart4;
-
- /* USER CODE BEGIN PV */
-
- /* USER CODE END PV */
-
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- static void MX_GPIO_Init(void);
- static void MX_I2C1_Init(void);
- static void MX_TIM2_Init(void);
- static void MX_TIM4_Init(void);
- static void MX_UART4_Init(void);
- static void MX_TIM3_Init(void);
- /* USER CODE BEGIN PFP */
-
- /* USER CODE END PFP */
-
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
-
-
-
- //重写标准输出函数
- int __io_putchar(int ch)
- {
- HAL_UART_Transmit(&huart4, (uint8_t *)&ch, 1, 10);
- return ch;
- }
-
-
- // 自定义空闲中断处理函�????????
- void uart4_idle_func(void)
- {
- int len = 0;
- //判定 是否为空闲中�????????
- if( __HAL_UART_GET_FLAG(&huart4, UART_FLAG_IDLE) == SET )
- {
- // 清除空闲中断标志,因为是自己定义的函数 系统不会清标
- __HAL_UART_CLEAR_IDLEFLAG(&huart4);
- // 计算接收数据的长
- len = sizeof(rx_buf) - huart4.RxXferCount;
- //第二个参数是 还剩下的空间
- // 打印接收到时数据 数据处理
- //printf("uart rx len = %d, data: %srn",len, rx_buf);
-
- // 使用strcpy复制字符�????????
- strcpy((char *)uart4_data, (char *)rx_buf);
-
- printf("%s instructions successrn", uart4_data);
- // 准备接收下一次数�?????????
- memset(rx_buf,0,len); // 清理接收容器
- //重置接收指针 剩余容器大小
- huart4.pRxBuffPtr = rx_buf;
- huart4.RxXferCount = sizeof(rx_buf);
- }
- }
-
- //控制马达
- void motor(int d){
- HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_6);//
- HAL_Delay(d);
- }
-
-
- // 音乐
- // 音乐盒基�??????变量
- extern int time_100ms_cnt; //0.1s计数�??????
- extern int Beat_speed; //节拍速度,代表半个节拍需要多少个0.1s
- extern int Beat_speed_n; //实际执行的节拍数
-
- extern int Beat_num; //这个�??????个音�??????要多少个 半拍
- extern int flag; //当其等于 1 时,表示�??????个音结束
- extern int EN_music ; //使能信号,用于开启整个音乐盒
- extern int list ; //音乐列表
- extern int list_max ; //音乐总数
- extern int Low_volume ; //音量大小
- extern int Low_volume_cnt;
- extern int music_speed_i; //音乐播放速度模式保存
- extern int music_speed_kz(int i);
-
- int tone[3][8];
- //初始化高中低音频�??????
- void tone_init(){
- tone[1][0] = 0; //不执行音�??????
- tone[1][1] = 191;
- tone[1][2] = 170;
- tone[1][3] = 151;
- tone[1][4] = 143;
- tone[1][5] = 127;
- tone[1][6] = 113;
- tone[1][7] = 101;
- // 低音 (Low)
- for (int i = 0; i < 8; i++) {
- tone[0][i] = tone[1][i] * 2; // 只是低音 近似的�??
- }
-
- // 高音 (High)
- for (int i = 0; i < 8; i++) {
- tone[2][i] = tone[1][i] / 2; // 只是高音 近似的�??
- }
- }
-
- #define MAX_unit_num 200 //�????????大乐谱数�????????
- //创建结构体保存乐�????????
- struct music_unit{
- char name[50]; //乐谱名称
- int unit[MAX_unit_num]; //发什么音
- int unit_HL[MAX_unit_num]; //发高音或者其�????????
- int time[MAX_unit_num]; //发音时间
- //int time_4[MAX_unit_num]; //判断是否�????????1/4�????????
- int num; //记录有多少个
- }music[25];
-
- //创建乐谱 返回有多少首音乐
- int music_init(){
- int cnt = 0;
- //第一首音�???????? 生日快乐
- strcpy(music[0].name, "生日快乐"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music0_unit[29] = {0,0, 5,5,6,5,1,7, 5,5,6,5,2,1,
- 5,5,6,3,1,7, 6,4,4,3,1,2,1,
- 0,0}; //基础乐谱
- int music0_time[29] = {1,1, 1,1,2,2,2,3, 1,1,2,2,2,3,
- 2,2,2,2,2,2, 2,2,2,2,2,2,3,
- 1,1}; //乐谱节拍
- music[0].num = 29; //乐谱总数
- int music0_unit_HL[29] = {1,1,
- 0,0,0,0,1,0, 0,0,0,0,1,1,
- 0,0,1,1,1,0, 0,1,1,1,1,1,1,
- 1,1}; //乐谱全为中音
-
- //第二首音�???????? �????????闪一闪亮晶晶
- cnt++;
- strcpy(music[1].name, "�????????闪一闪亮晶晶"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music1_unit[44] = {0,
- 1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
- 5,5,4,4,3,3,2, 5,5,4,4,3,3,2,
- 1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
- 0}; //基础乐谱
- int music1_time[44] = {2,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2}; //乐谱节拍
- int music1_unit_HL[44] =
- {1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1}; //乐谱全为中音
- music[1].num = 44; //乐谱总数
-
-
-
- //第三首音�???????? 两只老虎
- cnt++;
- strcpy(music[2].name, "两只老虎"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music2_unit[38] = {0,
- 1,2,3,1, 1,2,3,1, 3,4,5,5, 3,4,5,5,
- 5,6,5,4, 3,1,5,6, 5,4,3,1, 1,5,1,1,
- 1,5,1,1, 0}; //基础乐谱
- int music2_time[38] = {2,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 0,0,0,0, 1,1,0,0, 0,0,1,1, 1,1,1,2,
- 1,1,1,2, 2}; //乐谱节拍
- int music2_unit_HL[38] =
- {1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,0,1,1,
- 1,0,1,1, 1}; //乐谱�???????? 中音
- music[2].num = 38; //乐谱总数
-
-
- //第四首音�???????? 青花瓷片�????????
- cnt++;
- strcpy(music[3].name, "青花瓷片"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music3_unit[100] = {0,0,0,0, 0,5,5,3, 2,3,6,2, 3,5,3,2, 2,5,5,3,
- 2,3,5,2, 3,5,2,1, 1,1,2,3, 5,6,5,4, 5,3,3,2,
- 2,2,1,2, 1,1,2,1, 2,3,5,3, 3,3,5,5, 3,2,3,6,
- 2,3,5,3, 2,2,5,5, 3,2,3,5, 2,3,5,2, 1,1,1,2,
- 3,5,6,5, 4,5,3,3, 2,2,5,3, 2,2,2,1, 1,0,0,0}; //基础乐谱
-
- int music3_time[100] = {0,0,0,0, 0,0,0,0, 0,0,1,0, 0,0,0,2, 0,0,0,0,
- 0,0,1,0, 0,0,0,2, 0,0,0,0, 0,0,0,0, 0,0,0,0,
- 2,0,0,0, 0,0,0,0, 0,1,0,0, 2,0,0,0, 0,0,0,1,
- 0,0,0,0, 2,0,0,0, 0,0,0,1, 0,0,0,0, 2,0,0,0,
- 0,0,0,0, 0,0,0,0, 0,2,0,1, 0,0,0,1, 2,1,1,1}; //乐谱节拍
-
- for(int i =0;i<100;i++)
- music3_time[i] = music3_time[i]+1;
-
- int music3_unit_HL[100] =
- { 1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1,
- 1,1,0,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,0,
- 1,1,1,1, 1,1,1,1, 1,1,1,0, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1}; //乐谱�???????? 中音
- music[3].num = 100; //乐谱总数
-
-
-
-
- for (int i = 0; i < MAX_unit_num; i++) {
- //将乐谱保存进结构�????????
- if(i<music[0].num){//确保数据正确
- music[0].unit[i] =music0_unit[i];
- music[0].unit_HL[i] =music0_unit_HL[i];
- music[0].time[i] =music0_time[i];
- }
-
-
- //将乐谱保存进结构�????????
- if(i<music[1].num){//确保数据正确
- music[1].unit[i] =music1_unit[i];
- music[1].unit_HL[i] =music1_unit_HL[i];
- music[1].time[i] =music1_time[i];
- }
-
- //将乐谱保存进结构�????????
- if(i<music[2].num){//确保数据正确
- music[2].unit[i] =music2_unit[i];
- music[2].unit_HL[i] =music2_unit_HL[i];
- music[2].time[i] =music2_time[i];
- }
-
-
- //将乐谱保存进结构�????????
- if(i<music[3].num){//确保数据正确
- music[3].unit[i] =music3_unit[i];
- music[3].unit_HL[i] =music3_unit_HL[i];
- music[3].time[i] =music3_time[i];
- }
- }
-
-
- return cnt;
- }
-
- //播放�???? N首音�???? 音量�???? X 0 - 100
- void play_music(int n, int x){
- static int ni = 0; //用于判断 是否换了音乐
- static int cnt = 0; //记录播放到哪�????�???? 音节
- if(ni != n ){//如果音乐换了
- ni = n;
- cnt = 0;
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
- HAL_Delay(1000);//
- }
-
- //
- int value = tone[music[n].unit_HL[cnt]][music[n].unit[cnt]]; //获取频率
- if(flag == 1){ //接受到一个音节结�????
- flag = 0; //复位
- Beat_num = music[n].time[cnt]; //这个音需要多少个半拍
- //LED_BEEP(music[n].unit[cnt]); //LED随音节变动�?�变�????
-
- if(music[n].time[cnt] == 0){//如果�???? 1/4�????
- Beat_speed_n = Beat_speed /2;
- }
- else{//如果没有1/4�????
- Beat_speed_n = Beat_speed;
- }
-
- //if(value != 0)//如果有频率�?�执行,没有者只更新 时间�????
- __HAL_TIM_SET_AUTORELOAD(&htim4,value); //自动加载频率�????
-
- cnt ++; //可进行下�????次音�????
- if(cnt >= music[n].num){ //如果�????个音节播放完�????
- cnt = 0;//重新播放
- //__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
- //HAL_Delay(500);//
- }
- }
- //__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,x * (value/100));//设置音量
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,(value/10)*x);//设置音量
- }
-
-
- //串口音乐控制函数
- void music_kz(){
- if(EN_music == 1)//启动
- play_music(list,Low_volume);
- else
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
-
-
-
- if(strcmp("music volume increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 10;
- }
-
- if(strcmp("music volume reduction",(char *)uart4_data)==0){
- Low_volume = Low_volume - Low_volume_cnt;
- if(Low_volume <= 0)
- Low_volume = 0;
- }
-
-
- if(strcmp("music speed increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
- if(strcmp("music speed reduction",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i--;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(strcmp("music next song",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- list++;
- if(list > list_max){
- list = list_max;
- }
- }
- if(strcmp("music previous song",(char *)uart4_data)==0){
- list--;
- uart4_data[0] = '0';
- if(list < 0){
- list = 0;
- }
- }
-
- if(strcmp("music start",(char *)uart4_data)==0){
- EN_music = 1;
- }
- if(strcmp("music stop",(char *)uart4_data)==0){
- EN_music = 0;
- }
-
-
- }
-
-
- //数码管闹�?????
- extern int buf[8];
- extern int shi_shi;
- extern int shi_ge ;
- extern int fen_shi;
- extern int fen_ge ;
- extern int miao_shi ;
- extern int miao_ge ;
-
- extern int miao ;
- extern int shi ;
- extern int fen;
- //闹钟保存数组
- extern int alarm_clock_array[20][4];
- extern int alarm_clock_array_cnt;
-
- //通过输入不同的n,返回shi fen miao
- int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
-
- time_miao = time_miao + add_miao;
- time_fen = time_fen + time_miao/60;
- time_miao = time_miao % 60;
-
- time_fen = time_fen + add_fen;
- time_shi = time_shi + time_fen / 60;
- time_fen = time_fen%60;
-
- time_shi = time_shi + add_shi;
- time_shi = time_shi%24;
-
- if(n == 0) return time_shi;
- if(n == 1) return time_fen;
- if(n == 2) return time_miao;
-
- return -1;
- }
-
-
- //将字符解成数�?????
- int char_number(uint8_t c){
- if(c >= '0' && c <= '9')
- return c-'0';
- else
- return -1;
- }
-
- // zfc 为当前传入字符串
- // zfc_n为比较字符串
- // num为如果两字符串最初相等,则取字符串后面多少位的数�?????
- int number_char_come(uint8_t zfc[200], uint8_t zfc_n[200], int num){
- size_t len = strlen((char *)zfc_n);//无符号整数类�?????
-
- int cnt = 0;
- for(int i = 0;i < len;i++){
- if(zfc[i] != zfc_n[i]) return -1; //不相�?????
- else cnt++;
- }
- if(cnt != len) return -1;//两字符串不等
-
- size_t shen_len = strlen((char *)zfc) - len;//剩余字符串长�?????
- size_t hig_num = 0;//用以保存实际有效位数
-
- if(shen_len > num) hig_num = num;
- else hig_num = shen_len;
- //int number[200];
-
-
-
- int number1 = 0;
- int multiplier = 1; // 用于计算10的幂的变�?????
- for(int i = len + hig_num - 1; i >= len;i--){
- //number[i-len] = char_number(zfc[i]);
- if(char_number(zfc[i])== -1) {
- printf("rrr number errorrn");
- return -1;
- }
-
- multiplier = multiplier*10;
- number1 = number1 + char_number(zfc[i])*multiplier;
- }
-
- return number1;
-
- }
-
- // 函数定义:从字符串中提取两位数字
- int extract_two_digits(const char *str, const char *prefix, int *value) {
- char *pos = strstr(str, prefix); // 查找前缀的位�?????
- if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
-
- // 跳过前缀的长度,找到数字�?????始的位置
- pos += strlen(prefix);
-
- // �?????查接下来的两个字符是否是数字
- if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
- // 转换字符为数�?????
- *value = (pos[0] - '0') * 10 + (pos[1] - '0');
- return 1; // 成功提取,返�?????1
- }
-
- return 0; // 提取失败,返�?????0
- }
-
-
-
- //判断是否到底闹钟
- int en_clock = 0;//用于控制闹钟响铃
- int en_clock_cnt = 0;
- int clock_end[3] = {0};//记录闹钟无人时关闭的时间
- //串口设置闹钟
- void uart_clock(){
- int ci = 0;
- int ci_n = 0;
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
-
- ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- shi = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- fen = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- miao = ci_n;
- }
-
- //设置�?????个多少时间后的闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
- alarm_clock_array_cnt++;
- }
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
- alarm_clock_array_cnt++;
- }
-
- ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
- alarm_clock_array_cnt++;
- }
-
- // time shi = 12;fen = 10;miao = 12;music = 1;
- ci = 0;
- ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
- ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
- ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- //ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- if(ci == 3){
- //完美对应
- uart4_data[0] = '1';
- ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
- if(ci > list_max && ci<0) //如果大于音乐总数
- alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
-
- alarm_clock_array_cnt++;
- }
-
-
- if(strcmp("clock delay list",(char *)uart4_data)==0){
-
- uart4_data[0] = '0';
- for(int i = 0; i< alarm_clock_array_cnt;i++){
- if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
- printf("%d : time -> %d/%d/%d rn",i, alarm_clock_array[i][0],
- alarm_clock_array[i][1],
- alarm_clock_array[i][2]
- );
- }
- }
-
- //读取关闭第几位闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
- if(ci == 1){
- alarm_clock_array[ci_n][0] = -1;
- alarm_clock_array[ci_n][1] = -1;
- alarm_clock_array[ci_n][2] = -1;
- }
-
- //关闭闹钟
- if(strcmp("clock stop stop",(char *)uart4_data)==0){
- en_clock = 0;
- }
-
-
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- }
- void smg_xians(){
-
- }
-
-
- void alarm_clock(){
-
- static int pos = 0;
- HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
- HAL_Delay(1);
- pos++;
- if(pos == 3 && pos == 6) pos++;
- if(pos == 8) pos = 0;
-
-
- uart_clock();//调用串口控制
-
- for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
- //int cnt_clock = 0;
- if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
- en_clock_cnt = j;
- en_clock = 1;
- clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
- clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
- clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
- break;
- }
- }
-
- //当闹钟响�?????30S
- if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
- en_clock = 0;//关闭闹钟
- //EN_music = 1;
- }
-
- if(en_clock == 1 ){
- motor(10);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- }
-
- }
-
-
- uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
- //0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
- uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
- uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
-
- int humidity_min = 50;//能仍受的�?????低干燥程�?????
- int temperature_max = 50;//能仍受的�?????高温�?????
- int en_t = 0; //温度使能
- int en_r = 0; //湿度使能
-
- //计算出温湿度
- void Temperature_humidity(){
- //湿度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
- //写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
- //读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
- HAL_Delay(30);
- //进行高低字节转换
- RH_Code_low=(RH_Code & 0xff);
- RH_Code_high=(RH_Code >> 8)& 0xff;
- RH_Code=(RH_Code_low << 8)+RH_Code_high;
-
- //温度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
- //读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
- HAL_Delay(30);
- //进行高低字节转换
- Temp_Code_low=(Temp_Code & 0xff);
- Temp_Code_high=(Temp_Code >> 8)& 0xff;
- Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
-
- Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
- RH_Code=125*RH_Code/65536-6;//计算出湿度�??
- //printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- //串口输出温湿�???????
- HAL_Delay(2);
- }
-
-
-
- void uart_sensor(){
- int tr=0;
- int tr_i = 0;
- tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
- if(tr != 0){
- humidity_min = tr_i;
- }
-
- tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
- if(tr != 0){
- temperature_max = tr_i;
- }
-
-
- if(strcmp("sensor temperature start",(char *)uart4_data)==0){
- en_t = 1;
- }
- if(strcmp("sensor humidity start",(char *)uart4_data)==0){
- en_r = 1;
- }
- if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
- en_t = 0;
- }
- if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
- en_r = 0;
- }
-
-
- if(strcmp("sensor list",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%rn",Temp_Code/100,Temp_Code%100,RH_Code%100);
- printf("sensor en_t : %drn",en_t);
- printf("sensor en_r : %drn",en_r);
- printf("sensor temperature_max : %drn",temperature_max);
- printf("sensor humidity_min : %drn",humidity_min);
- }
-
- if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- }
-
-
- }
-
-
- void sensor(){
- static int iii = 0;
- if(iii == 0){
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
- HAL_Delay(2);
- iii++;
- }
- Temperature_humidity();
- uart_sensor();
-
- if(RH_Code < humidity_min && en_r == 1){
- //motor(10);
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
- }
-
- if(Temp_Code/100 >= temperature_max && en_t == 1){
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
- }
- }
-
-
- uint8_t DZP_data[6][34]={
- {0xAA,0x55,
- 0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
- 0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//�?//0//
-
- {0xAA,0x55,
- 0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
- 0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//�?//1//
-
- {0xAA,0x55,
- 0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
- 0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//�?//2//
-
- };
-
- void uart_mode(){
-
- if(strcmp("mode = music",(char *)uart4_data)==0){
- mode = 0;
- }
- if(strcmp("mode = clock",(char *)uart4_data)==0){
- mode = 1;
- }
- if(strcmp("mode = sensor",(char *)uart4_data)==0){
- mode = 2;
- }
- }
- void end_main(){
-
- tone_init(); //初始化音量频�??????
- list_max = music_init();//更新乐谱
- HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
- HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
- HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
-
- //1 使能串口空闲中断
- __HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
- //2.使能串口中断接收数据
- HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
- int mode_n = 1;
-
- while(1){
- music_kz();
-
- alarm_clock();
- uart_mode();
-
- sensor();
-
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
-
- }
- }
- /* USER CODE END 0 */
-
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
-
- /* USER CODE END 1 */
-
- /* MCU Configuration--------------------------------------------------------*/
-
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
-
- /* USER CODE BEGIN Init */
-
- /* USER CODE END Init */
-
- if(IS_ENGINEERING_BOOT_MODE())
- {
- /* Configure the system clock */
- SystemClock_Config();
- }
-
- /* USER CODE BEGIN SysInit */
-
- /* USER CODE END SysInit */
-
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_I2C1_Init();
- MX_TIM2_Init();
- MX_TIM4_Init();
- MX_UART4_Init();
- MX_TIM3_Init();
- /* USER CODE BEGIN 2 */
-
- end_main();
- /* USER CODE END 2 */
-
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
-
- /* USER CODE BEGIN 3 */
-
- //printf("afsgbhdntn");
- //HAL_Delay(500);
- }
- /* USER CODE END 3 */
- }
-
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
-
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;
- RCC_OscInitStruct.HSIState = RCC_HSI_ON;
- RCC_OscInitStruct.HSICalibrationValue = 16;
- RCC_OscInitStruct.HSIDivValue = RCC_HSI_DIV1;
- RCC_OscInitStruct.LSIState = RCC_LSI_ON;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL2.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL3.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL4.PLLState = RCC_PLL_NONE;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** RCC Clock Config
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_ACLK
- |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
- |RCC_CLOCKTYPE_PCLK3|RCC_CLOCKTYPE_PCLK4
- |RCC_CLOCKTYPE_PCLK5;
- RCC_ClkInitStruct.AXISSInit.AXI_Clock = RCC_AXISSOURCE_HSI;
- RCC_ClkInitStruct.AXISSInit.AXI_Div = RCC_AXI_DIV1;
- RCC_ClkInitStruct.MCUInit.MCU_Clock = RCC_MCUSSOURCE_HSI;
- RCC_ClkInitStruct.MCUInit.MCU_Div = RCC_MCU_DIV1;
- RCC_ClkInitStruct.APB4_Div = RCC_APB4_DIV1;
- RCC_ClkInitStruct.APB5_Div = RCC_APB5_DIV1;
- RCC_ClkInitStruct.APB1_Div = RCC_APB1_DIV1;
- RCC_ClkInitStruct.APB2_Div = RCC_APB2_DIV1;
- RCC_ClkInitStruct.APB3_Div = RCC_APB3_DIV1;
-
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- }
-
- /**
- * @brief I2C1 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_I2C1_Init(void)
- {
-
- /* USER CODE BEGIN I2C1_Init 0 */
-
- /* USER CODE END I2C1_Init 0 */
-
- /* USER CODE BEGIN I2C1_Init 1 */
-
- /* USER CODE END I2C1_Init 1 */
- hi2c1.Instance = I2C1;
- hi2c1.Init.Timing = 0x10707DBC;
- hi2c1.Init.OwnAddress1 = 0;
- hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
- hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
- hi2c1.Init.OwnAddress2 = 0;
- hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
- hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
- hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
- if (HAL_I2C_Init(&hi2c1) != HAL_OK)
- {
- Error_Handler();
- }
- /** Configure Analogue filter
- */
- if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
- {
- Error_Handler();
- }
- /** Configure Digital filter
- */
- if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN I2C1_Init 2 */
-
- /* USER CODE END I2C1_Init 2 */
-
- }
-
- /**
- * @brief TIM2 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM2_Init(void)
- {
-
- /* USER CODE BEGIN TIM2_Init 0 */
-
- /* USER CODE END TIM2_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
-
- /* USER CODE BEGIN TIM2_Init 1 */
-
- /* USER CODE END TIM2_Init 1 */
- htim2.Instance = TIM2;
- htim2.Init.Prescaler = 6400-1;
- htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim2.Init.Period = 1000-1;
- htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM2_Init 2 */
-
- /* USER CODE END TIM2_Init 2 */
-
- }
-
- /**
- * @brief TIM3 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM3_Init(void)
- {
-
- /* USER CODE BEGIN TIM3_Init 0 */
-
- /* USER CODE END TIM3_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
-
- /* USER CODE BEGIN TIM3_Init 1 */
-
- /* USER CODE END TIM3_Init 1 */
- htim3.Instance = TIM3;
- htim3.Init.Prescaler = 6399;
- htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim3.Init.Period = 10000-1;
- htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM3_Init 2 */
-
- /* USER CODE END TIM3_Init 2 */
-
- }
-
- /**
- * @brief TIM4 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM4_Init(void)
- {
-
- /* USER CODE BEGIN TIM4_Init 0 */
-
- /* USER CODE END TIM4_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
- TIM_OC_InitTypeDef sConfigOC = {0};
-
- /* USER CODE BEGIN TIM4_Init 1 */
-
- /* USER CODE END TIM4_Init 1 */
- htim4.Instance = TIM4;
- htim4.Init.Prescaler = 639;
- htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim4.Init.Period = 100-1;
- htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_TIM_PWM_Init(&htim4) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sConfigOC.OCMode = TIM_OCMODE_PWM1;
- sConfigOC.Pulse = 0;
- sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
- sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
- if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM4_Init 2 */
-
- /* USER CODE END TIM4_Init 2 */
- HAL_TIM_MspPostInit(&htim4);
-
- }
-
- /**
- * @brief UART4 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_UART4_Init(void)
- {
-
- /* USER CODE BEGIN UART4_Init 0 */
-
- /* USER CODE END UART4_Init 0 */
-
- /* USER CODE BEGIN UART4_Init 1 */
-
- /* USER CODE END UART4_Init 1 */
- huart4.Instance = UART4;
- huart4.Init.BaudRate = 115200;
- huart4.Init.WordLength = UART_WORDLENGTH_8B;
- huart4.Init.StopBits = UART_STOPBITS_1;
- huart4.Init.Parity = UART_PARITY_NONE;
- huart4.Init.Mode = UART_MODE_TX_RX;
- huart4.Init.HwFlowCtl = UART_HWCONTROL_NONE;
- huart4.Init.OverSampling = UART_OVERSAMPLING_16;
- huart4.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
- huart4.Init.ClockPrescaler = UART_PRESCALER_DIV1;
- huart4.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
- if (HAL_UART_Init(&huart4) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_SetTxFifoThreshold(&huart4, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_SetRxFifoThreshold(&huart4, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_DisableFifoMode(&huart4) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN UART4_Init 2 */
-
- /* USER CODE END UART4_Init 2 */
-
- }
-
- /**
- * @brief GPIO Initialization Function
- * @param None
- * @retval None
- */
- static void MX_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct = {0};
-
- /* GPIO Ports Clock Enable */
- __HAL_RCC_GPIOF_CLK_ENABLE();
- __HAL_RCC_GPIOC_CLK_ENABLE();
- __HAL_RCC_GPIOI_CLK_ENABLE();
- __HAL_RCC_GPIOG_CLK_ENABLE();
- __HAL_RCC_GPIOB_CLK_ENABLE();
- __HAL_RCC_GPIOE_CLK_ENABLE();
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1|GPIO_PIN_6, GPIO_PIN_RESET);
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
-
- /*Configure GPIO pins : PF1 PF6 */
- GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_6;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
-
- /*Configure GPIO pin : PC7 */
- GPIO_InitStruct.Pin = GPIO_PIN_7;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
-
- /*Configure GPIO pins : PI11 PI10 */
- GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_10;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);
-
- /*Configure GPIO pins : PG2 PG0 PG1 */
- GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_0|GPIO_PIN_1;
- GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
- GPIO_InitStruct.Pull = GPIO_PULLUP;
- HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
-
- /*Configure GPIO pin : PE9 */
- GPIO_InitStruct.Pin = GPIO_PIN_9;
- GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
- GPIO_InitStruct.Pull = GPIO_PULLUP;
- HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
-
- /* EXTI interrupt init*/
- HAL_NVIC_SetPriority(EXTI0_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI0_IRQn);
-
- HAL_NVIC_SetPriority(EXTI1_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI1_IRQn);
-
- HAL_NVIC_SetPriority(EXTI2_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI2_IRQn);
-
- HAL_NVIC_SetPriority(EXTI9_IRQn, 2, 0);
- HAL_NVIC_EnableIRQ(EXTI9_IRQn);
-
- }
-
- /* USER CODE BEGIN 4 */
-
- /* USER CODE END 4 */
-
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
-
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %drn", file, line) */
- /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
-
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file stm32mp1xx_it.c
- * @brief Interrupt Service Routines.
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2024 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
-
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- #include "stm32mp1xx_it.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- /* USER CODE END Includes */
-
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN TD */
- int mode = 0; //模式
- extern void uart4_idle_func(void);
- extern void smg_xians();
- // 音乐盒基�?????变量
- int time_100ms_cnt = 0; //0.1s计数�?????
- int Beat_speed = 5; //节拍速度,代表半个节拍需要多少个0.1s
- int Beat_speed_n = 0; //实际执行的节拍数
-
- int Beat_num = 2; //这个�?????个音�?????要多少个 半拍
- int flag = 0; //当其等于 1 时,表示�?????个音结束
- int EN_music = 0; //使能信号,用于开启整个音乐盒
- int list = 0; //音乐列表
- int list_max = 0; //音乐总数
- int Low_volume = 5; //音量大小
- int Low_volume_cnt = 3; //音量大小增加�?????
- int music_speed_i = 0; //音乐播放速度模式保存
- // 音乐播放速度控制函数
- int music_speed_kz(int i){
- //倍数计算公式 1 + (1 - (新的节拍速度 / 原来的节拍�?�度))
- switch(i){
- case 0:{
- Beat_speed = 5; //0.5s半个节拍,正�?????+�??????�度
- break;
- }
- case 1:{
- Beat_speed = 4; //1.2倍数
- break;
- }
- case 2:{
- Beat_speed = 3; //约等�??????? 1.5倍数
- break;
- }
- case 3:{
- Beat_speed = 1; //约等�??????? 2 倍数
- break;
- }
- case 4:{
- Beat_speed = 6; //约等�??????? 0.8 倍数
- break;
- }
- case 5:{
- Beat_speed = 7; //约等�??????? 0.6 倍数
- break;
- }
- default:{
- Beat_speed = 5; //0.5s半个节拍,正常�?�度
- i=0;
- break;
- }
- }
- return i;
- }
-
- //数码管闹�????
- int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
- int buf[8] = {0};
-
- //闹钟保存数组
- int alarm_clock_array[20][4] = {0};
- int alarm_clock_array_cnt = 0;
- //实时时钟信息
- int shi_shi = 0;
- int shi_ge = 0;
- int fen_shi = 0;
- int fen_ge = 0;
- int miao_shi = 0;
- int miao_ge = 0;
- int miao = 0;
- int shi = 0;
- int fen = 0;
-
- int EN_clock = 0;//闹钟设置使能
- extern int en_clock;//用于控制闹钟响铃
-
- //闹钟设置信息
- int shi_shi_clock = 0;
- int shi_ge_clock = 0;
- int fen_shi_clock = 0;
- int fen_ge_clock = 0;
- int miao_shi_clock = 0;
- int miao_ge_clock = 0;
- int miao_clock = 0, shi_clock = 0, fen_clock = 0;
-
- /* USER CODE END TD */
-
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
-
- /* USER CODE END PD */
-
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
-
- /* USER CODE END PM */
-
- /* Private variables ---------------------------------------------------------*/
- /* USER CODE BEGIN PV */
-
- /* USER CODE END PV */
-
- /* Private function prototypes -----------------------------------------------*/
- /* USER CODE BEGIN PFP */
-
- /* USER CODE END PFP */
-
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
-
- /* USER CODE END 0 */
-
- /* External variables --------------------------------------------------------*/
- extern TIM_HandleTypeDef htim2;
- extern TIM_HandleTypeDef htim3;
- extern UART_HandleTypeDef huart4;
- /* USER CODE BEGIN EV */
-
- /* USER CODE END EV */
-
- /******************************************************************************/
- /* Cortex-M4 Processor Interruption and Exception Handlers */
- /******************************************************************************/
- /**
- * @brief This function handles Non maskable interrupt.
- */
- void NMI_Handler(void)
- {
- /* USER CODE BEGIN NonMaskableInt_IRQn 0 */
-
- /* USER CODE END NonMaskableInt_IRQn 0 */
- /* USER CODE BEGIN NonMaskableInt_IRQn 1 */
- while (1)
- {
- }
- /* USER CODE END NonMaskableInt_IRQn 1 */
- }
-
- /**
- * @brief This function handles Hard fault interrupt.
- */
- void HardFault_Handler(void)
- {
- /* USER CODE BEGIN HardFault_IRQn 0 */
-
- /* USER CODE END HardFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_HardFault_IRQn 0 */
- /* USER CODE END W1_HardFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Memory management fault.
- */
- void MemManage_Handler(void)
- {
- /* USER CODE BEGIN MemoryManagement_IRQn 0 */
-
- /* USER CODE END MemoryManagement_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
- /* USER CODE END W1_MemoryManagement_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Pre-fetch fault, memory access fault.
- */
- void BusFault_Handler(void)
- {
- /* USER CODE BEGIN BusFault_IRQn 0 */
-
- /* USER CODE END BusFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_BusFault_IRQn 0 */
- /* USER CODE END W1_BusFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Undefined instruction or illegal state.
- */
- void UsageFault_Handler(void)
- {
- /* USER CODE BEGIN UsageFault_IRQn 0 */
-
- /* USER CODE END UsageFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_UsageFault_IRQn 0 */
- /* USER CODE END W1_UsageFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles System service call via SWI instruction.
- */
- void SVC_Handler(void)
- {
- /* USER CODE BEGIN SVCall_IRQn 0 */
-
- /* USER CODE END SVCall_IRQn 0 */
- /* USER CODE BEGIN SVCall_IRQn 1 */
-
- /* USER CODE END SVCall_IRQn 1 */
- }
-
- /**
- * @brief This function handles Debug monitor.
- */
- void DebugMon_Handler(void)
- {
- /* USER CODE BEGIN DebugMonitor_IRQn 0 */
-
- /* USER CODE END DebugMonitor_IRQn 0 */
- /* USER CODE BEGIN DebugMonitor_IRQn 1 */
-
- /* USER CODE END DebugMonitor_IRQn 1 */
- }
-
- /**
- * @brief This function handles Pendable request for system service.
- */
- void PendSV_Handler(void)
- {
- /* USER CODE BEGIN PendSV_IRQn 0 */
-
- /* USER CODE END PendSV_IRQn 0 */
- /* USER CODE BEGIN PendSV_IRQn 1 */
-
- /* USER CODE END PendSV_IRQn 1 */
- }
-
- /**
- * @brief This function handles System tick timer.
- */
- void SysTick_Handler(void)
- {
- /* USER CODE BEGIN SysTick_IRQn 0 */
-
- /* USER CODE END SysTick_IRQn 0 */
- HAL_IncTick();
- /* USER CODE BEGIN SysTick_IRQn 1 */
-
- /* USER CODE END SysTick_IRQn 1 */
- }
-
- /******************************************************************************/
- /* STM32MP1xx Peripheral Interrupt Handlers */
- /* Add here the Interrupt Handlers for the used peripherals. */
- /* For the available peripheral interrupt handler names, */
- /* please refer to the startup file (startup_stm32mp1xx.s). */
- /******************************************************************************/
-
- /**
- * @brief This function handles EXTI line0 interrupt.
- */
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line1 interrupt.
- */
- void EXTI1_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI1_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
- {
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
- fen_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- if(fen_clock>=60)
- {
- fen_clock=0;
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI1_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
- /* USER CODE BEGIN EXTI1_IRQn 1 */
-
- /* USER CODE END EXTI1_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line2 interrupt.
- */
- void EXTI2_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI2_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
- {
- list++;
- if(list > list_max){
- list = 0;
- }
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
- //在此处关闭闹�????
- en_clock = 0;
- }
- /* USER CODE END EXTI2_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
- /* USER CODE BEGIN EXTI2_IRQn 1 */
-
- /* USER CODE END EXTI2_IRQn 1 */
- }
-
- /**
- * @brief This function handles TIM2 global interrupt.
- */
- void TIM2_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM2_IRQn 0 */
- if(EN_music == 1)
- time_100ms_cnt++;
- else
- time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
-
- if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
- time_100ms_cnt = 0;
- flag = 1; //发�?�音节结束信�???????
- }
-
-
- //数码�????
- static int smg_time_100ms = 0;
- smg_time_100ms++;
- if(smg_time_100ms>=10){
- miao++;
- smg_time_100ms = 0;
- }
-
-
- if (miao>=60)
- {
- miao=0;
- fen++;
- if(fen>=60)
- {
- fen=0;
- shi++;
- if(shi>=24)
- {
- shi=0;
- }
- }
- }
-
-
- if(miao >= 60){
- miao = miao-60;
- fen++;
- }
- if(fen>=60){
- fen = fen-60;
- shi ++;
- }
- if(shi>= 24){
- shi = shi -24;
-
- }
-
-
- miao_shi=miao/10;
- miao_ge=miao%10;
-
- fen_shi=fen/10;
- fen_ge=fen%10;
-
- shi_shi=shi/10;
- shi_ge=shi%10;
-
-
- if(EN_clock == 0){
- buf[0]=smg_number[shi_shi];
- buf[1]=smg_number[shi_ge];
- buf[3]=smg_number[fen_shi];
- buf[4]=smg_number[fen_ge];
- buf[6]=smg_number[miao_shi];
- buf[7]=smg_number[miao_ge];
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
- }
-
- /* USER CODE END TIM2_IRQn 0 */
- HAL_TIM_IRQHandler(&htim2);
- /* USER CODE BEGIN TIM2_IRQn 1 */
-
- /* USER CODE END TIM2_IRQn 1 */
- }
-
- /**
- * @brief This function handles TIM3 global interrupt.
- */
- void TIM3_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM3_IRQn 0 */
- smg_xians();
- /* USER CODE END TIM3_IRQn 0 */
- HAL_TIM_IRQHandler(&htim3);
- /* USER CODE BEGIN TIM3_IRQn 1 */
-
- /* USER CODE END TIM3_IRQn 1 */
- }
-
- /**
- * @brief This function handles UART4 global interrupt.
- */
- void UART4_IRQHandler(void)
- {
- /* USER CODE BEGIN UART4_IRQn 0 */
- uart4_idle_func();
-
- /* USER CODE END UART4_IRQn 0 */
- HAL_UART_IRQHandler(&huart4);
- /* USER CODE BEGIN UART4_IRQn 1 */
-
- /* USER CODE END UART4_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line9 interrupt.
- */
- void EXTI9_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI9_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
- EN_music = !EN_music;
- }
-
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
- if(EN_clock == 1){
- //闹钟设置成功
- alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
- alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
- alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
- alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
- alarm_clock_array_cnt++;
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- EN_clock = 0;
- }
- else if(EN_clock == 0){
- //设置闹钟
- shi_shi_clock = shi_shi;
- shi_ge_clock = shi_ge;
- fen_shi_clock = fen_shi;
- fen_ge_clock = fen_ge;
- miao_shi_clock = 0;
- miao_ge_clock = 0;
- miao_clock = 0;
- shi_clock = shi;
- fen_clock = fen;
- EN_clock = 1;
- }
- }
-
-
-
-
-
-
- /* USER CODE END EXTI9_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
- /* USER CODE BEGIN EXTI9_IRQn 1 */
-
- /* USER CODE END EXTI9_IRQn 1 */
- }
-
- /**
- * @brief This function handles RCC wake-up interrupt.
- */
- void RCC_WAKEUP_IRQHandler(void)
- {
- /* USER CODE BEGIN RCC_WAKEUP_IRQn 0 */
-
- /* USER CODE END RCC_WAKEUP_IRQn 0 */
- HAL_RCC_WAKEUP_IRQHandler();
- /* USER CODE BEGIN RCC_WAKEUP_IRQn 1 */
-
- /* USER CODE END RCC_WAKEUP_IRQn 1 */
- }
-
- /* USER CODE BEGIN 1 */
-
- /* USER CODE END 1 */
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- mode = music
- mode = clock
- mode = sensor
-
- music volume increase
- music volume reduction
- music speed increase
- music speed reduction
- music next song
- music previous song
- music start
- music stop
-
- clock shi =
- clock fen =
- clock miao =
- clock delay shi =
- clock delay fen =
- clock delay miao =
-
- time shi = ;fen = ;miao =
- clock delay list
- clock stop list =
- clock stop stop
-
- sensor humidity_min =
- sensor temperature_max =
- sensor temperature start
- sensor humidity start
- sensor temperature stop
- sensor humidity stop
- sensor list
- sensor Temp_Code RH_Code
STM32 Hybrid
This design is a highly integrated multifunctional system based on the STM32MP157A microcontroller. It realizes rich interactions and functions by integrating multiple modules such as buzzer, digital tube, dot matrix screen, temperature and humidity sensor, LED light, button, etc. The system uses STM32CUBEIDE as a development platform, giving full play to the high performance and flexibility of the STM32MP157A microcontroller, and showing its wide application potential in embedded system design.
Modular design:This design adopts a modular design approach, integrating different functional modules (such as alarm clock, music box, temperature and humidity monitoring) after independent design. It not only improves the maintainability and scalability of the system, but also makes the functional implementation of each module clearer.
Flexible mode switching: Flexible switching between different modes (alarm clock, music box, temperature and humidity monitoring) is achieved through serial port communication, allowing users to easily select the required functions according to their needs, improving the user-friendliness and practicality of the system.
Diverse display and interaction:The dot matrix screen displays different Chinese characters (such as "钟", "音", "传") in different modes, which intuitively shows the current working mode and enhances the user experience. At the same time, the combination of buttons and serial port control allows users to operate the system in a variety of ways, such as adjusting the music playback speed, volume, switching songs, adjusting the alarm time, setting multiple alarms, etc., which greatly enriches the system's interactive methods.
Temperature and humidity monitoring and adjustment:The system integrates temperature and humidity sensors, which can monitor the ambient temperature and humidity in real time, and adjust the upper and lower limits of temperature and humidity through the serial port. When the temperature and humidity exceed the set range, the boundary prompt is given through the LED light, realizing intelligent monitoring and adjustment of the environment.
Efficient development platform:Using STM32CUBEIDE as the development platform, taking advantage of its powerful code editing, compiling, debugging functions, as well as rich library functions and sample projects, it greatly improves development efficiency and reduces development difficulty.
Demonstration of comprehensive application capabilities:This design not only demonstrates the powerful functions of the STM32MP157A microcontroller in embedded system design, but also reflects the designer's comprehensive application capabilities in hardware selection, circuit design, software programming, system debugging, etc.
In summary, this design is an embedded system that integrates versatility, flexibility, and user-friendliness, fully demonstrating the broad application prospects and potential of the STM32MP157A microcontroller in complex system design. Through the implementation of this design, not only has the understanding of embedded system design been deepened, but also the ability to solve practical problems has been improved.

I have devoted myself to the research of technology for more than 30 years. I am proficient in various languages such as Java, Linux, JavaScript, PHP, CSS, etc. I have made many contributions in the field of open source. I have established a developer documentation site to share some problems in technology development for everyone to read.

