
Mi informacion de contacto
Correo[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Este diseño construye cuidadosamente un sistema integrado integral con el microcontrolador de alto rendimiento STM32MP157A como unidad de control central. El sistema integra inteligentemente una variedad de módulos periféricos como zumbadores, pantallas de tubo digitales, pantallas de matriz de puntos, sensores de temperatura y humedad, indicadores LED y botones para formar un dispositivo híbrido inteligente con funciones ricas y fácil operación. A través de la comunicación en serie, los usuarios pueden cambiar de manera flexible el modo de trabajo del sistema e implementar fácilmente funciones básicas como despertador, reproducción de cajas de música y monitoreo y control de temperatura y humedad.
hardware central
plataforma de software
Aspectos destacados de las funciones del sistema
Cambio de modo flexible: A través de la comunicación en serie, los usuarios pueden cambiar fácilmente entre los tres modos de despertador, reproducción de caja de música y monitoreo de temperatura y humedad para satisfacer las necesidades de uso en diferentes escenarios.
Pantalla de información dinámica: Como ventana de visualización de información del sistema, la pantalla de matriz de puntos puede mostrar los caracteres chinos correspondientes según el modo de trabajo actual (como "reloj" representa el modo de despertador, "tono" representa el modo de caja de música y "pase" puede ser considerado como un logotipo simplificado para el control de temperatura y humedad), que proporciona a los usuarios información operativa intuitiva.
Experiencia de interacción con botones: El diseño considera completamente la experiencia interactiva del usuario. Se pueden realizar las operaciones funcionales correspondientes en cada modo presionando los botones, como el ajuste de velocidad y volumen de la caja de música, el cambio de canción, el control de pausa/reproducción, así como el ajuste de tiempo y la configuración de. el despertador, apagar el despertador, etc.
Control inteligente de temperatura y humedad. : El sistema tiene un sensor de temperatura y humedad incorporado que puede monitorear las condiciones ambientales en tiempo real y recibir instrucciones del usuario a través del puerto serie para ajustar los umbrales superior e inferior de temperatura y humedad. Una vez que los parámetros ambientales excedan el rango establecido, la luz indicadora LED se iluminará como un recordatorio de límites para ayudar a los usuarios a tomar medidas oportunas.
La caja de música ha sido creada antes, por lo que la configuración no cambia:caja de música STM32


Presta atención a los pines.





La caja de música se escribió antes, por lo que no repetiremos las operaciones anteriores aquí. Agregaremos el puerto serie y la conversión de modo.
-
- //串口音乐控制函数
- void music_kz(){
- if(EN_music == 1)//启动
- play_music(list,Low_volume);
- else
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
-
-
-
- if(strcmp("music volume increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 10;
- }
-
- if(strcmp("music volume reduction",(char *)uart4_data)==0){
- Low_volume = Low_volume - Low_volume_cnt;
- if(Low_volume <= 0)
- Low_volume = 0;
- }
-
-
- if(strcmp("music speed increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
- if(strcmp("music speed reduction",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i--;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(strcmp("music next song",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- list++;
- if(list > list_max){
- list = list_max;
- }
- }
- if(strcmp("music previous song",(char *)uart4_data)==0){
- list--;
- uart4_data[0] = '0';
- if(list < 0){
- list = 0;
- }
- }
-
- if(strcmp("music start",(char *)uart4_data)==0){
- EN_music = 1;
- }
- if(strcmp("music stop",(char *)uart4_data)==0){
- EN_music = 0;
- }
-
-
- }
Utilice la variable de modo para representar el modo, y los siguientes tres botones son iguales.
-
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- void uart_mode(){
-
- if(strcmp("mode = music",(char *)uart4_data)==0){
- mode = 0;
- }
- if(strcmp("mode = clock",(char *)uart4_data)==0){
- mode = 1;
- }
- if(strcmp("mode = sensor",(char *)uart4_data)==0){
- mode = 2;
- }
- }
-
- uint8_t DZP_data[6][34]={
- {0xAA,0x55,
- 0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
- 0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//音
-
- {0xAA,0x55,
- 0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
- 0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//钟//1//
-
- {0xAA,0x55,
- 0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
- 0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//传//2//
-
- };
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
C Principal
-
- //数码管闹钟基础变量
- extern int buf[8];
- extern int shi_shi;
- extern int shi_ge ;
- extern int fen_shi;
- extern int fen_ge ;
- extern int miao_shi ;
- extern int miao_ge ;
-
- extern int miao ;
- extern int shi ;
- extern int fen;
- //闹钟保存数组
- extern int alarm_clock_array[20][4];
- extern int alarm_clock_array_cnt;
variables básicas stm32mp1xx_it.c
-
-
- //数码管闹钟基础设置
- int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
- int buf[8] = {0};
-
- //闹钟保存数组
- int alarm_clock_array[20][4] = {0};
- int alarm_clock_array_cnt = 0;
- //实时时钟信息
- int shi_shi = 0;
- int shi_ge = 0;
- int fen_shi = 0;
- int fen_ge = 0;
- int miao_shi = 0;
- int miao_ge = 0;
- int miao = 0;
- int shi = 0;
- int fen = 0;
-
- int EN_clock = 0;//闹钟设置使能
- extern int en_clock;//用于控制闹钟响铃
-
- //闹钟设置信息
- int shi_shi_clock = 0;
- int shi_ge_clock = 0;
- int fen_shi_clock = 0;
- int fen_ge_clock = 0;
- int miao_shi_clock = 0;
- int miao_ge_clock = 0;
- int miao_clock = 0, shi_clock = 0, fen_clock = 0;
-
- void TIM2_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM2_IRQn 0 */
- if(EN_music == 1)
- time_100ms_cnt++;
- else
- time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
-
- if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
- time_100ms_cnt = 0;
- flag = 1; //发�?�音节结束信�???????
- }
-
-
- //数码�????
- static int smg_time_100ms = 0;
- smg_time_100ms++;
- if(smg_time_100ms>=10){
- miao++;
- smg_time_100ms = 0;
- }
-
-
- if (miao>=60)
- {
- miao=0;
- fen++;
- if(fen>=60)
- {
- fen=0;
- shi++;
- if(shi>=24)
- {
- shi=0;
- }
- }
- }
-
-
- if(miao >= 60){
- miao = miao-60;
- fen++;
- }
- if(fen>=60){
- fen = fen-60;
- shi ++;
- }
- if(shi>= 24){
- shi = shi -24;
-
- }
-
-
- miao_shi=miao/10;
- miao_ge=miao%10;
-
- fen_shi=fen/10;
- fen_ge=fen%10;
-
- shi_shi=shi/10;
- shi_ge=shi%10;
-
-
- if(EN_clock == 0){
- buf[0]=smg_number[shi_shi];
- buf[1]=smg_number[shi_ge];
- buf[3]=smg_number[fen_shi];
- buf[4]=smg_number[fen_ge];
- buf[6]=smg_number[miao_shi];
- buf[7]=smg_number[miao_ge];
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
- }
-
- /* USER CODE END TIM2_IRQn 0 */
- HAL_TIM_IRQHandler(&htim2);
- /* USER CODE BEGIN TIM2_IRQn 1 */
-
- /* USER CODE END TIM2_IRQn 1 */
- }
-
- void EXTI9_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI9_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
- EN_music = !EN_music;
- }
-
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
- if(EN_clock == 1){
- //闹钟设置成功
- alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
- alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
- alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
- alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
- alarm_clock_array_cnt++;
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- EN_clock = 0;
- }
- else if(EN_clock == 0){
- //设置闹钟
- shi_shi_clock = shi_shi;
- shi_ge_clock = shi_ge;
- fen_shi_clock = fen_shi;
- fen_ge_clock = fen_ge;
- miao_shi_clock = 0;
- miao_ge_clock = 0;
- miao_clock = 0;
- shi_clock = shi;
- fen_clock = fen;
- EN_clock = 1;
- }
- }
-
-
-
-
-
-
- /* USER CODE END EXTI9_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
- /* USER CODE BEGIN EXTI9_IRQn 1 */
-
- /* USER CODE END EXTI9_IRQn 1 */
- }
-
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line1 interrupt.
- */
- void EXTI1_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI1_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
- {
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
- fen_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- if(fen_clock>=60)
- {
- fen_clock=0;
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI1_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
- /* USER CODE BEGIN EXTI1_IRQn 1 */
-
- /* USER CODE END EXTI1_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line2 interrupt.
- */
- void EXTI2_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI2_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
- {
- list++;
- if(list > list_max){
- list = 0;
- }
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
- //在此处关闭闹�????
- en_clock = 0;
- }
- /* USER CODE END EXTI2_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
- /* USER CODE BEGIN EXTI2_IRQn 1 */
-
- /* USER CODE END EXTI2_IRQn 1 */
- }
- //通过输入不同的n,返回shi fen miao
- int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
-
- time_miao = time_miao + add_miao;
- time_fen = time_fen + time_miao/60;
- time_miao = time_miao % 60;
-
- time_fen = time_fen + add_fen;
- time_shi = time_shi + time_fen / 60;
- time_fen = time_fen%60;
-
- time_shi = time_shi + add_shi;
- time_shi = time_shi%24;
-
- if(n == 0) return time_shi;
- if(n == 1) return time_fen;
- if(n == 2) return time_miao;
-
- return -1;
- }
-
- // 函数定义:从字符串中提取两位数字
- int extract_two_digits(const char *str, const char *prefix, int *value) {
- char *pos = strstr(str, prefix); // 查找前缀的位�?????
- if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
-
- // 跳过前缀的长度,找到数字�?????始的位置
- pos += strlen(prefix);
-
- // �?????查接下来的两个字符是否是数字
- if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
- // 转换字符为数�?????
- *value = (pos[0] - '0') * 10 + (pos[1] - '0');
- return 1; // 成功提取,返�?????1
- }
-
- return 0; // 提取失败,返�?????0
- }
-
- //判断是否到底闹钟
- int en_clock = 0;//用于控制闹钟响铃
- int en_clock_cnt = 0;
- int clock_end[3] = {0};//记录闹钟无人时关闭的时间
- //串口设置闹钟
- void uart_clock(){
- int ci = 0;
- int ci_n = 0;
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
-
- ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- shi = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- fen = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- miao = ci_n;
- }
-
- //设置�?????个多少时间后的闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
- alarm_clock_array_cnt++;
- }
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
- alarm_clock_array_cnt++;
- }
-
- ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
- alarm_clock_array_cnt++;
- }
-
- // time shi = 12;fen = 10;miao = 12;music = 1;
- ci = 0;
- ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
- ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
- ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- //ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- if(ci == 3){
- //完美对应
- uart4_data[0] = '1';
- ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
- if(ci > list_max && ci<0) //如果大于音乐总数
- alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
-
- alarm_clock_array_cnt++;
- }
-
-
- if(strcmp("clock delay list",(char *)uart4_data)==0){
-
- uart4_data[0] = '0';
- for(int i = 0; i< alarm_clock_array_cnt;i++){
- if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
- printf("%d : time -> %d/%d/%d rn",i, alarm_clock_array[i][0],
- alarm_clock_array[i][1],
- alarm_clock_array[i][2]
- );
- }
- }
-
- //读取关闭第几位闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
- if(ci == 1){
- alarm_clock_array[ci_n][0] = -1;
- alarm_clock_array[ci_n][1] = -1;
- alarm_clock_array[ci_n][2] = -1;
- }
-
- //关闭闹钟
- if(strcmp("clock stop stop",(char *)uart4_data)==0){
- en_clock = 0;
- }
-
-
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- }
-
- void alarm_clock(){
- //时钟显示(数码管)
- static int pos = 0;
- HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
- HAL_Delay(1);
- pos++;
- if(pos == 3 && pos == 6) pos++;
- if(pos == 8) pos = 0;
-
-
- uart_clock();//调用串口控制
-
- for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
- //int cnt_clock = 0;
- if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
- en_clock_cnt = j;
- en_clock = 1;
- clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
- clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
- clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
- break;
- }
- }
-
- //当闹钟响�?????30S
- if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
- en_clock = 0;//关闭闹钟
- //EN_music = 1;
- }
-
- if(en_clock == 1 ){
- motor(10);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- }
-
- }
-
- uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
- //0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
- uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
- uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
-
- int humidity_min = 50;//能仍受最低干燥程度
- int temperature_max = 50;//能仍受的最高温度
- int en_t = 0; //温度使能
- int en_r = 0; //湿度使能
-
- //计算出温湿度
- void Temperature_humidity(){
- //湿度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
- //写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
- //读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
- HAL_Delay(30);
- //进行高低字节转换
- RH_Code_low=(RH_Code & 0xff);
- RH_Code_high=(RH_Code >> 8)& 0xff;
- RH_Code=(RH_Code_low << 8)+RH_Code_high;
-
- //温度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
- //读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
- HAL_Delay(30);
- //进行高低字节转换
- Temp_Code_low=(Temp_Code & 0xff);
- Temp_Code_high=(Temp_Code >> 8)& 0xff;
- Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
-
- Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
- RH_Code=125*RH_Code/65536-6;//计算出湿度�??
- //printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- //串口输出温湿�???????
- HAL_Delay(2);
- }
-
- void uart_sensor(){
- int tr=0;
- int tr_i = 0;
- tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
- if(tr != 0){
- humidity_min = tr_i;
- }
-
- tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
- if(tr != 0){
- temperature_max = tr_i;
- }
-
-
- if(strcmp("sensor temperature start",(char *)uart4_data)==0){
- en_t = 1;
- }
- if(strcmp("sensor humidity start",(char *)uart4_data)==0){
- en_r = 1;
- }
- if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
- en_t = 0;
- }
- if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
- en_r = 0;
- }
-
-
- if(strcmp("sensor list",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%rn",Temp_Code/100,Temp_Code%100,RH_Code%100);
- printf("sensor en_t : %drn",en_t);
- printf("sensor en_r : %drn",en_r);
- printf("sensor temperature_max : %drn",temperature_max);
- printf("sensor humidity_min : %drn",humidity_min);
- }
-
- if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- }
-
-
- }
-
- void sensor(){
- static int iii = 0;
- if(iii == 0){
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
- HAL_Delay(2);
- iii++;
- }
- Temperature_humidity();
- uart_sensor();
-
- if(RH_Code < humidity_min && en_r == 1){
- //motor(10);
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
- }
-
- if(Temp_Code/100 >= temperature_max && en_t == 1){
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
- }
- }
-
- void end_main(){
-
- tone_init(); //初始化音量频�??????
- list_max = music_init();//更新乐谱
- HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
- HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
- HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
-
- //1 使能串口空闲中断
- __HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
- //2.使能串口中断接收数据
- HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
- int mode_n = 1;
-
- while(1){
- music_kz();
-
- alarm_clock();
- uart_mode();
-
- sensor();
-
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
-
- }
- }
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2024 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
-
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
-
-
- #include <string.h>
-
-
- uint8_t rx_buf[200]={0}; //接收不定长数
- uint8_t uart4_data[200] = {0};
-
- extern int mode; //模式
- /* USER CODE END Includes */
-
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
-
- /* USER CODE END PTD */
-
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
-
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
-
- /* USER CODE END PM */
-
- /* Private variables ---------------------------------------------------------*/
- I2C_HandleTypeDef hi2c1;
-
- TIM_HandleTypeDef htim2;
- TIM_HandleTypeDef htim3;
- TIM_HandleTypeDef htim4;
-
- UART_HandleTypeDef huart4;
-
- /* USER CODE BEGIN PV */
-
- /* USER CODE END PV */
-
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- static void MX_GPIO_Init(void);
- static void MX_I2C1_Init(void);
- static void MX_TIM2_Init(void);
- static void MX_TIM4_Init(void);
- static void MX_UART4_Init(void);
- static void MX_TIM3_Init(void);
- /* USER CODE BEGIN PFP */
-
- /* USER CODE END PFP */
-
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
-
-
-
- //重写标准输出函数
- int __io_putchar(int ch)
- {
- HAL_UART_Transmit(&huart4, (uint8_t *)&ch, 1, 10);
- return ch;
- }
-
-
- // 自定义空闲中断处理函�????????
- void uart4_idle_func(void)
- {
- int len = 0;
- //判定 是否为空闲中�????????
- if( __HAL_UART_GET_FLAG(&huart4, UART_FLAG_IDLE) == SET )
- {
- // 清除空闲中断标志,因为是自己定义的函数 系统不会清标
- __HAL_UART_CLEAR_IDLEFLAG(&huart4);
- // 计算接收数据的长
- len = sizeof(rx_buf) - huart4.RxXferCount;
- //第二个参数是 还剩下的空间
- // 打印接收到时数据 数据处理
- //printf("uart rx len = %d, data: %srn",len, rx_buf);
-
- // 使用strcpy复制字符�????????
- strcpy((char *)uart4_data, (char *)rx_buf);
-
- printf("%s instructions successrn", uart4_data);
- // 准备接收下一次数�?????????
- memset(rx_buf,0,len); // 清理接收容器
- //重置接收指针 剩余容器大小
- huart4.pRxBuffPtr = rx_buf;
- huart4.RxXferCount = sizeof(rx_buf);
- }
- }
-
- //控制马达
- void motor(int d){
- HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_6);//
- HAL_Delay(d);
- }
-
-
- // 音乐
- // 音乐盒基�??????变量
- extern int time_100ms_cnt; //0.1s计数�??????
- extern int Beat_speed; //节拍速度,代表半个节拍需要多少个0.1s
- extern int Beat_speed_n; //实际执行的节拍数
-
- extern int Beat_num; //这个�??????个音�??????要多少个 半拍
- extern int flag; //当其等于 1 时,表示�??????个音结束
- extern int EN_music ; //使能信号,用于开启整个音乐盒
- extern int list ; //音乐列表
- extern int list_max ; //音乐总数
- extern int Low_volume ; //音量大小
- extern int Low_volume_cnt;
- extern int music_speed_i; //音乐播放速度模式保存
- extern int music_speed_kz(int i);
-
- int tone[3][8];
- //初始化高中低音频�??????
- void tone_init(){
- tone[1][0] = 0; //不执行音�??????
- tone[1][1] = 191;
- tone[1][2] = 170;
- tone[1][3] = 151;
- tone[1][4] = 143;
- tone[1][5] = 127;
- tone[1][6] = 113;
- tone[1][7] = 101;
- // 低音 (Low)
- for (int i = 0; i < 8; i++) {
- tone[0][i] = tone[1][i] * 2; // 只是低音 近似的�??
- }
-
- // 高音 (High)
- for (int i = 0; i < 8; i++) {
- tone[2][i] = tone[1][i] / 2; // 只是高音 近似的�??
- }
- }
-
- #define MAX_unit_num 200 //�????????大乐谱数�????????
- //创建结构体保存乐�????????
- struct music_unit{
- char name[50]; //乐谱名称
- int unit[MAX_unit_num]; //发什么音
- int unit_HL[MAX_unit_num]; //发高音或者其�????????
- int time[MAX_unit_num]; //发音时间
- //int time_4[MAX_unit_num]; //判断是否�????????1/4�????????
- int num; //记录有多少个
- }music[25];
-
- //创建乐谱 返回有多少首音乐
- int music_init(){
- int cnt = 0;
- //第一首音�???????? 生日快乐
- strcpy(music[0].name, "生日快乐"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music0_unit[29] = {0,0, 5,5,6,5,1,7, 5,5,6,5,2,1,
- 5,5,6,3,1,7, 6,4,4,3,1,2,1,
- 0,0}; //基础乐谱
- int music0_time[29] = {1,1, 1,1,2,2,2,3, 1,1,2,2,2,3,
- 2,2,2,2,2,2, 2,2,2,2,2,2,3,
- 1,1}; //乐谱节拍
- music[0].num = 29; //乐谱总数
- int music0_unit_HL[29] = {1,1,
- 0,0,0,0,1,0, 0,0,0,0,1,1,
- 0,0,1,1,1,0, 0,1,1,1,1,1,1,
- 1,1}; //乐谱全为中音
-
- //第二首音�???????? �????????闪一闪亮晶晶
- cnt++;
- strcpy(music[1].name, "�????????闪一闪亮晶晶"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music1_unit[44] = {0,
- 1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
- 5,5,4,4,3,3,2, 5,5,4,4,3,3,2,
- 1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
- 0}; //基础乐谱
- int music1_time[44] = {2,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
- 2}; //乐谱节拍
- int music1_unit_HL[44] =
- {1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
- 1}; //乐谱全为中音
- music[1].num = 44; //乐谱总数
-
-
-
- //第三首音�???????? 两只老虎
- cnt++;
- strcpy(music[2].name, "两只老虎"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music2_unit[38] = {0,
- 1,2,3,1, 1,2,3,1, 3,4,5,5, 3,4,5,5,
- 5,6,5,4, 3,1,5,6, 5,4,3,1, 1,5,1,1,
- 1,5,1,1, 0}; //基础乐谱
- int music2_time[38] = {2,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 0,0,0,0, 1,1,0,0, 0,0,1,1, 1,1,1,2,
- 1,1,1,2, 2}; //乐谱节拍
- int music2_unit_HL[38] =
- {1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,0,1,1,
- 1,0,1,1, 1}; //乐谱�???????? 中音
- music[2].num = 38; //乐谱总数
-
-
- //第四首音�???????? 青花瓷片�????????
- cnt++;
- strcpy(music[3].name, "青花瓷片"); // 使用strcpy复制字符�???????? 给音乐命�????????
- int music3_unit[100] = {0,0,0,0, 0,5,5,3, 2,3,6,2, 3,5,3,2, 2,5,5,3,
- 2,3,5,2, 3,5,2,1, 1,1,2,3, 5,6,5,4, 5,3,3,2,
- 2,2,1,2, 1,1,2,1, 2,3,5,3, 3,3,5,5, 3,2,3,6,
- 2,3,5,3, 2,2,5,5, 3,2,3,5, 2,3,5,2, 1,1,1,2,
- 3,5,6,5, 4,5,3,3, 2,2,5,3, 2,2,2,1, 1,0,0,0}; //基础乐谱
-
- int music3_time[100] = {0,0,0,0, 0,0,0,0, 0,0,1,0, 0,0,0,2, 0,0,0,0,
- 0,0,1,0, 0,0,0,2, 0,0,0,0, 0,0,0,0, 0,0,0,0,
- 2,0,0,0, 0,0,0,0, 0,1,0,0, 2,0,0,0, 0,0,0,1,
- 0,0,0,0, 2,0,0,0, 0,0,0,1, 0,0,0,0, 2,0,0,0,
- 0,0,0,0, 0,0,0,0, 0,2,0,1, 0,0,0,1, 2,1,1,1}; //乐谱节拍
-
- for(int i =0;i<100;i++)
- music3_time[i] = music3_time[i]+1;
-
- int music3_unit_HL[100] =
- { 1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1,
- 1,1,0,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,0,
- 1,1,1,1, 1,1,1,1, 1,1,1,0, 1,1,1,1, 1,1,1,1,
- 1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1}; //乐谱�???????? 中音
- music[3].num = 100; //乐谱总数
-
-
-
-
- for (int i = 0; i < MAX_unit_num; i++) {
- //将乐谱保存进结构�????????
- if(i<music[0].num){//确保数据正确
- music[0].unit[i] =music0_unit[i];
- music[0].unit_HL[i] =music0_unit_HL[i];
- music[0].time[i] =music0_time[i];
- }
-
-
- //将乐谱保存进结构�????????
- if(i<music[1].num){//确保数据正确
- music[1].unit[i] =music1_unit[i];
- music[1].unit_HL[i] =music1_unit_HL[i];
- music[1].time[i] =music1_time[i];
- }
-
- //将乐谱保存进结构�????????
- if(i<music[2].num){//确保数据正确
- music[2].unit[i] =music2_unit[i];
- music[2].unit_HL[i] =music2_unit_HL[i];
- music[2].time[i] =music2_time[i];
- }
-
-
- //将乐谱保存进结构�????????
- if(i<music[3].num){//确保数据正确
- music[3].unit[i] =music3_unit[i];
- music[3].unit_HL[i] =music3_unit_HL[i];
- music[3].time[i] =music3_time[i];
- }
- }
-
-
- return cnt;
- }
-
- //播放�???? N首音�???? 音量�???? X 0 - 100
- void play_music(int n, int x){
- static int ni = 0; //用于判断 是否换了音乐
- static int cnt = 0; //记录播放到哪�????�???? 音节
- if(ni != n ){//如果音乐换了
- ni = n;
- cnt = 0;
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
- HAL_Delay(1000);//
- }
-
- //
- int value = tone[music[n].unit_HL[cnt]][music[n].unit[cnt]]; //获取频率
- if(flag == 1){ //接受到一个音节结�????
- flag = 0; //复位
- Beat_num = music[n].time[cnt]; //这个音需要多少个半拍
- //LED_BEEP(music[n].unit[cnt]); //LED随音节变动�?�变�????
-
- if(music[n].time[cnt] == 0){//如果�???? 1/4�????
- Beat_speed_n = Beat_speed /2;
- }
- else{//如果没有1/4�????
- Beat_speed_n = Beat_speed;
- }
-
- //if(value != 0)//如果有频率�?�执行,没有者只更新 时间�????
- __HAL_TIM_SET_AUTORELOAD(&htim4,value); //自动加载频率�????
-
- cnt ++; //可进行下�????次音�????
- if(cnt >= music[n].num){ //如果�????个音节播放完�????
- cnt = 0;//重新播放
- //__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
- //HAL_Delay(500);//
- }
- }
- //__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,x * (value/100));//设置音量
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,(value/10)*x);//设置音量
- }
-
-
- //串口音乐控制函数
- void music_kz(){
- if(EN_music == 1)//启动
- play_music(list,Low_volume);
- else
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
-
-
-
- if(strcmp("music volume increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 10;
- }
-
- if(strcmp("music volume reduction",(char *)uart4_data)==0){
- Low_volume = Low_volume - Low_volume_cnt;
- if(Low_volume <= 0)
- Low_volume = 0;
- }
-
-
- if(strcmp("music speed increase",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
- if(strcmp("music speed reduction",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- music_speed_i--;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(strcmp("music next song",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- list++;
- if(list > list_max){
- list = list_max;
- }
- }
- if(strcmp("music previous song",(char *)uart4_data)==0){
- list--;
- uart4_data[0] = '0';
- if(list < 0){
- list = 0;
- }
- }
-
- if(strcmp("music start",(char *)uart4_data)==0){
- EN_music = 1;
- }
- if(strcmp("music stop",(char *)uart4_data)==0){
- EN_music = 0;
- }
-
-
- }
-
-
- //数码管闹�?????
- extern int buf[8];
- extern int shi_shi;
- extern int shi_ge ;
- extern int fen_shi;
- extern int fen_ge ;
- extern int miao_shi ;
- extern int miao_ge ;
-
- extern int miao ;
- extern int shi ;
- extern int fen;
- //闹钟保存数组
- extern int alarm_clock_array[20][4];
- extern int alarm_clock_array_cnt;
-
- //通过输入不同的n,返回shi fen miao
- int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
-
- time_miao = time_miao + add_miao;
- time_fen = time_fen + time_miao/60;
- time_miao = time_miao % 60;
-
- time_fen = time_fen + add_fen;
- time_shi = time_shi + time_fen / 60;
- time_fen = time_fen%60;
-
- time_shi = time_shi + add_shi;
- time_shi = time_shi%24;
-
- if(n == 0) return time_shi;
- if(n == 1) return time_fen;
- if(n == 2) return time_miao;
-
- return -1;
- }
-
-
- //将字符解成数�?????
- int char_number(uint8_t c){
- if(c >= '0' && c <= '9')
- return c-'0';
- else
- return -1;
- }
-
- // zfc 为当前传入字符串
- // zfc_n为比较字符串
- // num为如果两字符串最初相等,则取字符串后面多少位的数�?????
- int number_char_come(uint8_t zfc[200], uint8_t zfc_n[200], int num){
- size_t len = strlen((char *)zfc_n);//无符号整数类�?????
-
- int cnt = 0;
- for(int i = 0;i < len;i++){
- if(zfc[i] != zfc_n[i]) return -1; //不相�?????
- else cnt++;
- }
- if(cnt != len) return -1;//两字符串不等
-
- size_t shen_len = strlen((char *)zfc) - len;//剩余字符串长�?????
- size_t hig_num = 0;//用以保存实际有效位数
-
- if(shen_len > num) hig_num = num;
- else hig_num = shen_len;
- //int number[200];
-
-
-
- int number1 = 0;
- int multiplier = 1; // 用于计算10的幂的变�?????
- for(int i = len + hig_num - 1; i >= len;i--){
- //number[i-len] = char_number(zfc[i]);
- if(char_number(zfc[i])== -1) {
- printf("rrr number errorrn");
- return -1;
- }
-
- multiplier = multiplier*10;
- number1 = number1 + char_number(zfc[i])*multiplier;
- }
-
- return number1;
-
- }
-
- // 函数定义:从字符串中提取两位数字
- int extract_two_digits(const char *str, const char *prefix, int *value) {
- char *pos = strstr(str, prefix); // 查找前缀的位�?????
- if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
-
- // 跳过前缀的长度,找到数字�?????始的位置
- pos += strlen(prefix);
-
- // �?????查接下来的两个字符是否是数字
- if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
- // 转换字符为数�?????
- *value = (pos[0] - '0') * 10 + (pos[1] - '0');
- return 1; // 成功提取,返�?????1
- }
-
- return 0; // 提取失败,返�?????0
- }
-
-
-
- //判断是否到底闹钟
- int en_clock = 0;//用于控制闹钟响铃
- int en_clock_cnt = 0;
- int clock_end[3] = {0};//记录闹钟无人时关闭的时间
- //串口设置闹钟
- void uart_clock(){
- int ci = 0;
- int ci_n = 0;
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
-
- ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- shi = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- fen = ci_n;
- }
-
- //ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
- ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- miao = ci_n;
- }
-
- //设置�?????个多少时间后的闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
- alarm_clock_array_cnt++;
- }
- //ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
- alarm_clock_array_cnt++;
- }
-
- ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
- if(ci == 1){
- uart4_data[0] = '1';
- alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
- alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
- alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
- alarm_clock_array_cnt++;
- }
-
- // time shi = 12;fen = 10;miao = 12;music = 1;
- ci = 0;
- ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
- ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
- ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- //ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
- if(ci == 3){
- //完美对应
- uart4_data[0] = '1';
- ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
- if(ci > list_max && ci<0) //如果大于音乐总数
- alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
-
- alarm_clock_array_cnt++;
- }
-
-
- if(strcmp("clock delay list",(char *)uart4_data)==0){
-
- uart4_data[0] = '0';
- for(int i = 0; i< alarm_clock_array_cnt;i++){
- if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
- printf("%d : time -> %d/%d/%d rn",i, alarm_clock_array[i][0],
- alarm_clock_array[i][1],
- alarm_clock_array[i][2]
- );
- }
- }
-
- //读取关闭第几位闹�?????
- //ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
- ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
- if(ci == 1){
- alarm_clock_array[ci_n][0] = -1;
- alarm_clock_array[ci_n][1] = -1;
- alarm_clock_array[ci_n][2] = -1;
- }
-
- //关闭闹钟
- if(strcmp("clock stop stop",(char *)uart4_data)==0){
- en_clock = 0;
- }
-
-
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- }
- void smg_xians(){
-
- }
-
-
- void alarm_clock(){
-
- static int pos = 0;
- HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
- HAL_Delay(1);
- pos++;
- if(pos == 3 && pos == 6) pos++;
- if(pos == 8) pos = 0;
-
-
- uart_clock();//调用串口控制
-
- for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
- //int cnt_clock = 0;
- if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
- en_clock_cnt = j;
- en_clock = 1;
- clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
- clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
- clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
- break;
- }
- }
-
- //当闹钟响�?????30S
- if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
- en_clock = 0;//关闭闹钟
- //EN_music = 1;
- }
-
- if(en_clock == 1 ){
- motor(10);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- }
-
- }
-
-
- uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
- //0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
- uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
- uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
-
- int humidity_min = 50;//能仍受的�?????低干燥程�?????
- int temperature_max = 50;//能仍受的�?????高温�?????
- int en_t = 0; //温度使能
- int en_r = 0; //湿度使能
-
- //计算出温湿度
- void Temperature_humidity(){
- //湿度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
- //写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
- //读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
- HAL_Delay(30);
- //进行高低字节转换
- RH_Code_low=(RH_Code & 0xff);
- RH_Code_high=(RH_Code >> 8)& 0xff;
- RH_Code=(RH_Code_low << 8)+RH_Code_high;
-
- //温度
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
- HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
- //读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
- HAL_Delay(30);
- //进行高低字节转换
- Temp_Code_low=(Temp_Code & 0xff);
- Temp_Code_high=(Temp_Code >> 8)& 0xff;
- Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
-
- Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
- RH_Code=125*RH_Code/65536-6;//计算出湿度�??
- //printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- //串口输出温湿�???????
- HAL_Delay(2);
- }
-
-
-
- void uart_sensor(){
- int tr=0;
- int tr_i = 0;
- tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
- if(tr != 0){
- humidity_min = tr_i;
- }
-
- tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
- if(tr != 0){
- temperature_max = tr_i;
- }
-
-
- if(strcmp("sensor temperature start",(char *)uart4_data)==0){
- en_t = 1;
- }
- if(strcmp("sensor humidity start",(char *)uart4_data)==0){
- en_r = 1;
- }
- if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
- en_t = 0;
- }
- if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
- en_r = 0;
- }
-
-
- if(strcmp("sensor list",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%rn",Temp_Code/100,Temp_Code%100,RH_Code%100);
- printf("sensor en_t : %drn",en_t);
- printf("sensor en_r : %drn",en_r);
- printf("sensor temperature_max : %drn",temperature_max);
- printf("sensor humidity_min : %drn",humidity_min);
- }
-
- if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
- uart4_data[0] = '0';
- printf("Temp_Code = r%d.%d RH_Code = %d%%n",Temp_Code/100,Temp_Code%100,RH_Code%100);
- }
-
-
- }
-
-
- void sensor(){
- static int iii = 0;
- if(iii == 0){
- HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
- HAL_Delay(2);
- iii++;
- }
- Temperature_humidity();
- uart_sensor();
-
- if(RH_Code < humidity_min && en_r == 1){
- //motor(10);
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
- }
-
- if(Temp_Code/100 >= temperature_max && en_t == 1){
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
- }
- else{
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
- }
- }
-
-
- uint8_t DZP_data[6][34]={
- {0xAA,0x55,
- 0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
- 0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//�?//0//
-
- {0xAA,0x55,
- 0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
- 0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//�?//1//
-
- {0xAA,0x55,
- 0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
- 0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//�?//2//
-
- };
-
- void uart_mode(){
-
- if(strcmp("mode = music",(char *)uart4_data)==0){
- mode = 0;
- }
- if(strcmp("mode = clock",(char *)uart4_data)==0){
- mode = 1;
- }
- if(strcmp("mode = sensor",(char *)uart4_data)==0){
- mode = 2;
- }
- }
- void end_main(){
-
- tone_init(); //初始化音量频�??????
- list_max = music_init();//更新乐谱
- HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
- HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
- HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
-
- //1 使能串口空闲中断
- __HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
- //2.使能串口中断接收数据
- HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
- int mode_n = 1;
-
- while(1){
- music_kz();
-
- alarm_clock();
- uart_mode();
-
- sensor();
-
- if(mode_n != mode){
- mode_n = mode;
- for(int i = 0; i<34;i++){
- //printf("afgsbgafdffag");
- HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
- HAL_Delay(2);
- }
- }
-
- }
- }
- /* USER CODE END 0 */
-
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
-
- /* USER CODE END 1 */
-
- /* MCU Configuration--------------------------------------------------------*/
-
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
-
- /* USER CODE BEGIN Init */
-
- /* USER CODE END Init */
-
- if(IS_ENGINEERING_BOOT_MODE())
- {
- /* Configure the system clock */
- SystemClock_Config();
- }
-
- /* USER CODE BEGIN SysInit */
-
- /* USER CODE END SysInit */
-
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_I2C1_Init();
- MX_TIM2_Init();
- MX_TIM4_Init();
- MX_UART4_Init();
- MX_TIM3_Init();
- /* USER CODE BEGIN 2 */
-
- end_main();
- /* USER CODE END 2 */
-
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
-
- /* USER CODE BEGIN 3 */
-
- //printf("afsgbhdntn");
- //HAL_Delay(500);
- }
- /* USER CODE END 3 */
- }
-
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
-
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;
- RCC_OscInitStruct.HSIState = RCC_HSI_ON;
- RCC_OscInitStruct.HSICalibrationValue = 16;
- RCC_OscInitStruct.HSIDivValue = RCC_HSI_DIV1;
- RCC_OscInitStruct.LSIState = RCC_LSI_ON;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL2.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL3.PLLState = RCC_PLL_NONE;
- RCC_OscInitStruct.PLL4.PLLState = RCC_PLL_NONE;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** RCC Clock Config
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_ACLK
- |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
- |RCC_CLOCKTYPE_PCLK3|RCC_CLOCKTYPE_PCLK4
- |RCC_CLOCKTYPE_PCLK5;
- RCC_ClkInitStruct.AXISSInit.AXI_Clock = RCC_AXISSOURCE_HSI;
- RCC_ClkInitStruct.AXISSInit.AXI_Div = RCC_AXI_DIV1;
- RCC_ClkInitStruct.MCUInit.MCU_Clock = RCC_MCUSSOURCE_HSI;
- RCC_ClkInitStruct.MCUInit.MCU_Div = RCC_MCU_DIV1;
- RCC_ClkInitStruct.APB4_Div = RCC_APB4_DIV1;
- RCC_ClkInitStruct.APB5_Div = RCC_APB5_DIV1;
- RCC_ClkInitStruct.APB1_Div = RCC_APB1_DIV1;
- RCC_ClkInitStruct.APB2_Div = RCC_APB2_DIV1;
- RCC_ClkInitStruct.APB3_Div = RCC_APB3_DIV1;
-
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- }
-
- /**
- * @brief I2C1 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_I2C1_Init(void)
- {
-
- /* USER CODE BEGIN I2C1_Init 0 */
-
- /* USER CODE END I2C1_Init 0 */
-
- /* USER CODE BEGIN I2C1_Init 1 */
-
- /* USER CODE END I2C1_Init 1 */
- hi2c1.Instance = I2C1;
- hi2c1.Init.Timing = 0x10707DBC;
- hi2c1.Init.OwnAddress1 = 0;
- hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
- hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
- hi2c1.Init.OwnAddress2 = 0;
- hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
- hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
- hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
- if (HAL_I2C_Init(&hi2c1) != HAL_OK)
- {
- Error_Handler();
- }
- /** Configure Analogue filter
- */
- if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
- {
- Error_Handler();
- }
- /** Configure Digital filter
- */
- if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN I2C1_Init 2 */
-
- /* USER CODE END I2C1_Init 2 */
-
- }
-
- /**
- * @brief TIM2 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM2_Init(void)
- {
-
- /* USER CODE BEGIN TIM2_Init 0 */
-
- /* USER CODE END TIM2_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
-
- /* USER CODE BEGIN TIM2_Init 1 */
-
- /* USER CODE END TIM2_Init 1 */
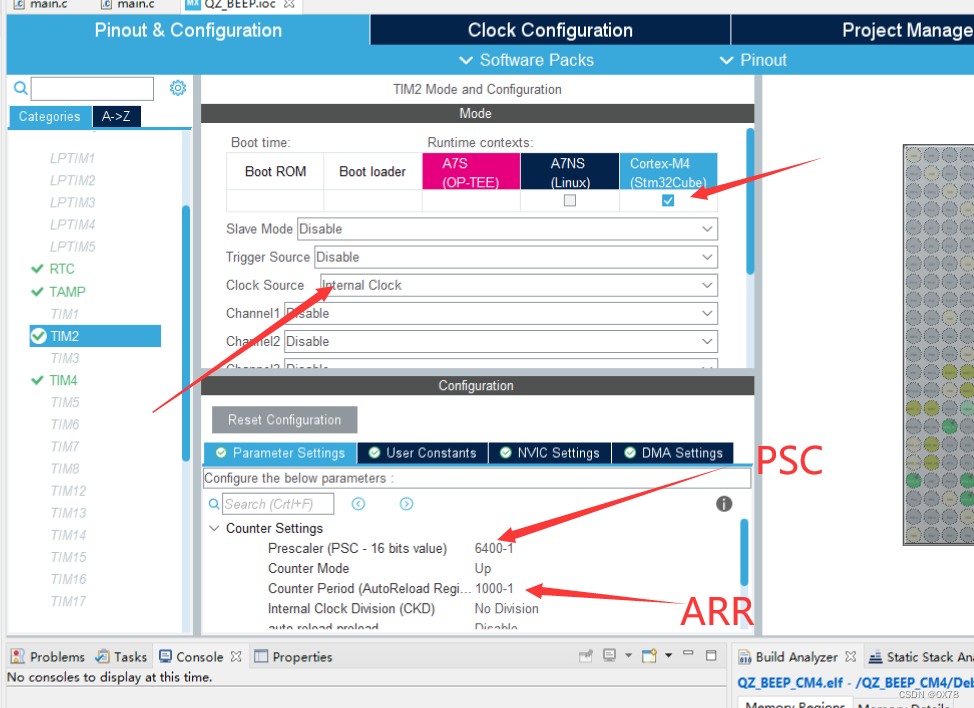
- htim2.Instance = TIM2;
- htim2.Init.Prescaler = 6400-1;
- htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim2.Init.Period = 1000-1;
- htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM2_Init 2 */
-
- /* USER CODE END TIM2_Init 2 */
-
- }
-
- /**
- * @brief TIM3 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM3_Init(void)
- {
-
- /* USER CODE BEGIN TIM3_Init 0 */
-
- /* USER CODE END TIM3_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
-
- /* USER CODE BEGIN TIM3_Init 1 */
-
- /* USER CODE END TIM3_Init 1 */
- htim3.Instance = TIM3;
- htim3.Init.Prescaler = 6399;
- htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim3.Init.Period = 10000-1;
- htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM3_Init 2 */
-
- /* USER CODE END TIM3_Init 2 */
-
- }
-
- /**
- * @brief TIM4 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM4_Init(void)
- {
-
- /* USER CODE BEGIN TIM4_Init 0 */
-
- /* USER CODE END TIM4_Init 0 */
-
- TIM_ClockConfigTypeDef sClockSourceConfig = {0};
- TIM_MasterConfigTypeDef sMasterConfig = {0};
- TIM_OC_InitTypeDef sConfigOC = {0};
-
- /* USER CODE BEGIN TIM4_Init 1 */
-
- /* USER CODE END TIM4_Init 1 */
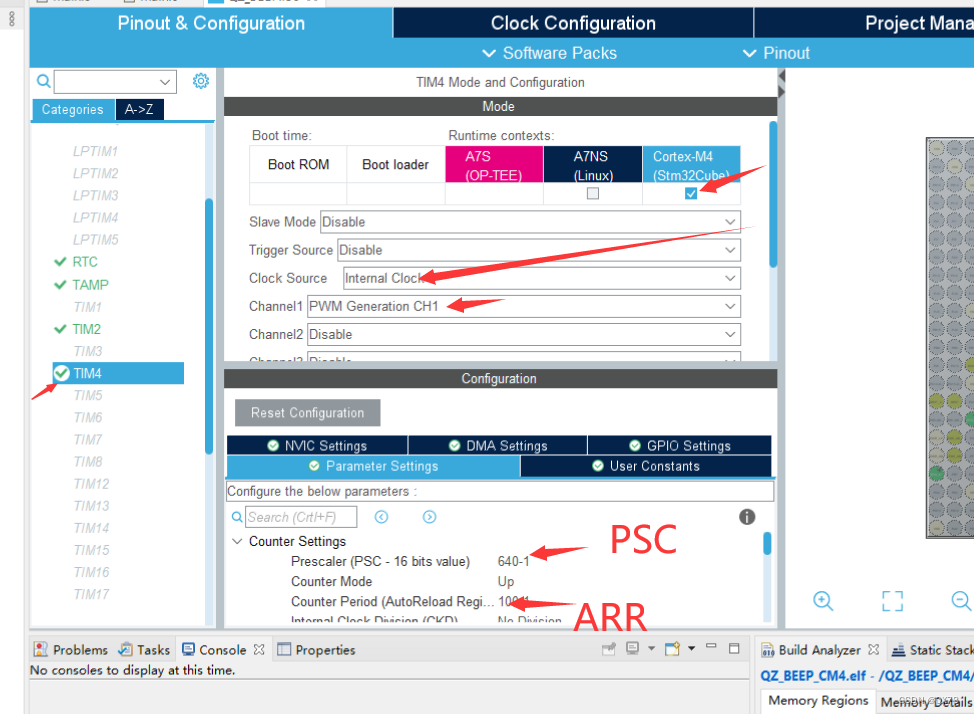
- htim4.Instance = TIM4;
- htim4.Init.Prescaler = 639;
- htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
- htim4.Init.Period = 100-1;
- htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
- htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
- if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
- {
- Error_Handler();
- }
- sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
- if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_TIM_PWM_Init(&htim4) != HAL_OK)
- {
- Error_Handler();
- }
- sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
- sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
- if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- sConfigOC.OCMode = TIM_OCMODE_PWM1;
- sConfigOC.Pulse = 0;
- sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
- sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
- if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN TIM4_Init 2 */
-
- /* USER CODE END TIM4_Init 2 */
- HAL_TIM_MspPostInit(&htim4);
-
- }
-
- /**
- * @brief UART4 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_UART4_Init(void)
- {
-
- /* USER CODE BEGIN UART4_Init 0 */
-
- /* USER CODE END UART4_Init 0 */
-
- /* USER CODE BEGIN UART4_Init 1 */
-
- /* USER CODE END UART4_Init 1 */
- huart4.Instance = UART4;
- huart4.Init.BaudRate = 115200;
- huart4.Init.WordLength = UART_WORDLENGTH_8B;
- huart4.Init.StopBits = UART_STOPBITS_1;
- huart4.Init.Parity = UART_PARITY_NONE;
- huart4.Init.Mode = UART_MODE_TX_RX;
- huart4.Init.HwFlowCtl = UART_HWCONTROL_NONE;
- huart4.Init.OverSampling = UART_OVERSAMPLING_16;
- huart4.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
- huart4.Init.ClockPrescaler = UART_PRESCALER_DIV1;
- huart4.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
- if (HAL_UART_Init(&huart4) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_SetTxFifoThreshold(&huart4, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_SetRxFifoThreshold(&huart4, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
- {
- Error_Handler();
- }
- if (HAL_UARTEx_DisableFifoMode(&huart4) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN UART4_Init 2 */
-
- /* USER CODE END UART4_Init 2 */
-
- }
-
- /**
- * @brief GPIO Initialization Function
- * @param None
- * @retval None
- */
- static void MX_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct = {0};
-
- /* GPIO Ports Clock Enable */
- __HAL_RCC_GPIOF_CLK_ENABLE();
- __HAL_RCC_GPIOC_CLK_ENABLE();
- __HAL_RCC_GPIOI_CLK_ENABLE();
- __HAL_RCC_GPIOG_CLK_ENABLE();
- __HAL_RCC_GPIOB_CLK_ENABLE();
- __HAL_RCC_GPIOE_CLK_ENABLE();
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1|GPIO_PIN_6, GPIO_PIN_RESET);
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
-
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
-
- /*Configure GPIO pins : PF1 PF6 */
- GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_6;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
-
- /*Configure GPIO pin : PC7 */
- GPIO_InitStruct.Pin = GPIO_PIN_7;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
-
- /*Configure GPIO pins : PI11 PI10 */
- GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_10;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);
-
- /*Configure GPIO pins : PG2 PG0 PG1 */
- GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_0|GPIO_PIN_1;
- GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
- GPIO_InitStruct.Pull = GPIO_PULLUP;
- HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
-
- /*Configure GPIO pin : PE9 */
- GPIO_InitStruct.Pin = GPIO_PIN_9;
- GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
- GPIO_InitStruct.Pull = GPIO_PULLUP;
- HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
-
- /* EXTI interrupt init*/
- HAL_NVIC_SetPriority(EXTI0_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI0_IRQn);
-
- HAL_NVIC_SetPriority(EXTI1_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI1_IRQn);
-
- HAL_NVIC_SetPriority(EXTI2_IRQn, 3, 0);
- HAL_NVIC_EnableIRQ(EXTI2_IRQn);
-
- HAL_NVIC_SetPriority(EXTI9_IRQn, 2, 0);
- HAL_NVIC_EnableIRQ(EXTI9_IRQn);
-
- }
-
- /* USER CODE BEGIN 4 */
-
- /* USER CODE END 4 */
-
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
-
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %drn", file, line) */
- /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
-
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file stm32mp1xx_it.c
- * @brief Interrupt Service Routines.
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2024 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
-
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- #include "stm32mp1xx_it.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- /* USER CODE END Includes */
-
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN TD */
- int mode = 0; //模式
- extern void uart4_idle_func(void);
- extern void smg_xians();
- // 音乐盒基�?????变量
- int time_100ms_cnt = 0; //0.1s计数�?????
- int Beat_speed = 5; //节拍速度,代表半个节拍需要多少个0.1s
- int Beat_speed_n = 0; //实际执行的节拍数
-
- int Beat_num = 2; //这个�?????个音�?????要多少个 半拍
- int flag = 0; //当其等于 1 时,表示�?????个音结束
- int EN_music = 0; //使能信号,用于开启整个音乐盒
- int list = 0; //音乐列表
- int list_max = 0; //音乐总数
- int Low_volume = 5; //音量大小
- int Low_volume_cnt = 3; //音量大小增加�?????
- int music_speed_i = 0; //音乐播放速度模式保存
- // 音乐播放速度控制函数
- int music_speed_kz(int i){
- //倍数计算公式 1 + (1 - (新的节拍速度 / 原来的节拍�?�度))
- switch(i){
- case 0:{
- Beat_speed = 5; //0.5s半个节拍,正�?????+�??????�度
- break;
- }
- case 1:{
- Beat_speed = 4; //1.2倍数
- break;
- }
- case 2:{
- Beat_speed = 3; //约等�??????? 1.5倍数
- break;
- }
- case 3:{
- Beat_speed = 1; //约等�??????? 2 倍数
- break;
- }
- case 4:{
- Beat_speed = 6; //约等�??????? 0.8 倍数
- break;
- }
- case 5:{
- Beat_speed = 7; //约等�??????? 0.6 倍数
- break;
- }
- default:{
- Beat_speed = 5; //0.5s半个节拍,正常�?�度
- i=0;
- break;
- }
- }
- return i;
- }
-
- //数码管闹�????
- int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
- int buf[8] = {0};
-
- //闹钟保存数组
- int alarm_clock_array[20][4] = {0};
- int alarm_clock_array_cnt = 0;
- //实时时钟信息
- int shi_shi = 0;
- int shi_ge = 0;
- int fen_shi = 0;
- int fen_ge = 0;
- int miao_shi = 0;
- int miao_ge = 0;
- int miao = 0;
- int shi = 0;
- int fen = 0;
-
- int EN_clock = 0;//闹钟设置使能
- extern int en_clock;//用于控制闹钟响铃
-
- //闹钟设置信息
- int shi_shi_clock = 0;
- int shi_ge_clock = 0;
- int fen_shi_clock = 0;
- int fen_ge_clock = 0;
- int miao_shi_clock = 0;
- int miao_ge_clock = 0;
- int miao_clock = 0, shi_clock = 0, fen_clock = 0;
-
- /* USER CODE END TD */
-
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
-
- /* USER CODE END PD */
-
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
-
- /* USER CODE END PM */
-
- /* Private variables ---------------------------------------------------------*/
- /* USER CODE BEGIN PV */
-
- /* USER CODE END PV */
-
- /* Private function prototypes -----------------------------------------------*/
- /* USER CODE BEGIN PFP */
-
- /* USER CODE END PFP */
-
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
-
- /* USER CODE END 0 */
-
- /* External variables --------------------------------------------------------*/
- extern TIM_HandleTypeDef htim2;
- extern TIM_HandleTypeDef htim3;
- extern UART_HandleTypeDef huart4;
- /* USER CODE BEGIN EV */
-
- /* USER CODE END EV */
-
- /******************************************************************************/
- /* Cortex-M4 Processor Interruption and Exception Handlers */
- /******************************************************************************/
- /**
- * @brief This function handles Non maskable interrupt.
- */
- void NMI_Handler(void)
- {
- /* USER CODE BEGIN NonMaskableInt_IRQn 0 */
-
- /* USER CODE END NonMaskableInt_IRQn 0 */
- /* USER CODE BEGIN NonMaskableInt_IRQn 1 */
- while (1)
- {
- }
- /* USER CODE END NonMaskableInt_IRQn 1 */
- }
-
- /**
- * @brief This function handles Hard fault interrupt.
- */
- void HardFault_Handler(void)
- {
- /* USER CODE BEGIN HardFault_IRQn 0 */
-
- /* USER CODE END HardFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_HardFault_IRQn 0 */
- /* USER CODE END W1_HardFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Memory management fault.
- */
- void MemManage_Handler(void)
- {
- /* USER CODE BEGIN MemoryManagement_IRQn 0 */
-
- /* USER CODE END MemoryManagement_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
- /* USER CODE END W1_MemoryManagement_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Pre-fetch fault, memory access fault.
- */
- void BusFault_Handler(void)
- {
- /* USER CODE BEGIN BusFault_IRQn 0 */
-
- /* USER CODE END BusFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_BusFault_IRQn 0 */
- /* USER CODE END W1_BusFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles Undefined instruction or illegal state.
- */
- void UsageFault_Handler(void)
- {
- /* USER CODE BEGIN UsageFault_IRQn 0 */
-
- /* USER CODE END UsageFault_IRQn 0 */
- while (1)
- {
- /* USER CODE BEGIN W1_UsageFault_IRQn 0 */
- /* USER CODE END W1_UsageFault_IRQn 0 */
- }
- }
-
- /**
- * @brief This function handles System service call via SWI instruction.
- */
- void SVC_Handler(void)
- {
- /* USER CODE BEGIN SVCall_IRQn 0 */
-
- /* USER CODE END SVCall_IRQn 0 */
- /* USER CODE BEGIN SVCall_IRQn 1 */
-
- /* USER CODE END SVCall_IRQn 1 */
- }
-
- /**
- * @brief This function handles Debug monitor.
- */
- void DebugMon_Handler(void)
- {
- /* USER CODE BEGIN DebugMonitor_IRQn 0 */
-
- /* USER CODE END DebugMonitor_IRQn 0 */
- /* USER CODE BEGIN DebugMonitor_IRQn 1 */
-
- /* USER CODE END DebugMonitor_IRQn 1 */
- }
-
- /**
- * @brief This function handles Pendable request for system service.
- */
- void PendSV_Handler(void)
- {
- /* USER CODE BEGIN PendSV_IRQn 0 */
-
- /* USER CODE END PendSV_IRQn 0 */
- /* USER CODE BEGIN PendSV_IRQn 1 */
-
- /* USER CODE END PendSV_IRQn 1 */
- }
-
- /**
- * @brief This function handles System tick timer.
- */
- void SysTick_Handler(void)
- {
- /* USER CODE BEGIN SysTick_IRQn 0 */
-
- /* USER CODE END SysTick_IRQn 0 */
- HAL_IncTick();
- /* USER CODE BEGIN SysTick_IRQn 1 */
-
- /* USER CODE END SysTick_IRQn 1 */
- }
-
- /******************************************************************************/
- /* STM32MP1xx Peripheral Interrupt Handlers */
- /* Add here the Interrupt Handlers for the used peripherals. */
- /* For the available peripheral interrupt handler names, */
- /* please refer to the startup file (startup_stm32mp1xx.s). */
- /******************************************************************************/
-
- /**
- * @brief This function handles EXTI line0 interrupt.
- */
- void EXTI0_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI0_IRQn 0 */
-
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
- {
-
- //每次按下解决 音量�??????? Low_volume_cnt
- Low_volume = Low_volume + Low_volume_cnt;
- if(Low_volume >= 10)
- Low_volume = 0;
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
-
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI0_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
- /* USER CODE BEGIN EXTI0_IRQn 1 */
-
- /* USER CODE END EXTI0_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line1 interrupt.
- */
- void EXTI1_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI1_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
- {
- music_speed_i++;
- music_speed_i = music_speed_kz(music_speed_i);
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
- fen_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- if(fen_clock>=60)
- {
- fen_clock=0;
- shi_clock++;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- if(shi_clock>=24)
- {
- shi_clock=0;
- }
- }
-
- miao_shi_clock=miao_clock/10;
- miao_ge_clock=miao_clock%10;
- fen_shi_clock=fen_clock/10;
- fen_ge_clock=fen_clock%10;
- shi_shi_clock=shi_clock/10;
- shi_ge_clock=shi_clock%10;
- buf[0]=smg_number[shi_shi_clock];
- buf[1]=smg_number[shi_ge_clock];
- buf[3]=smg_number[fen_shi_clock];
- buf[4]=smg_number[fen_ge_clock];
- buf[6]=smg_number[miao_shi_clock];
- buf[7]=smg_number[miao_ge_clock];
- }
- /* USER CODE END EXTI1_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
- /* USER CODE BEGIN EXTI1_IRQn 1 */
-
- /* USER CODE END EXTI1_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line2 interrupt.
- */
- void EXTI2_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI2_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
- {
- list++;
- if(list > list_max){
- list = 0;
- }
- }
-
- if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
- //在此处关闭闹�????
- en_clock = 0;
- }
- /* USER CODE END EXTI2_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
- /* USER CODE BEGIN EXTI2_IRQn 1 */
-
- /* USER CODE END EXTI2_IRQn 1 */
- }
-
- /**
- * @brief This function handles TIM2 global interrupt.
- */
- void TIM2_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM2_IRQn 0 */
- if(EN_music == 1)
- time_100ms_cnt++;
- else
- time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
-
- if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
- time_100ms_cnt = 0;
- flag = 1; //发�?�音节结束信�???????
- }
-
-
- //数码�????
- static int smg_time_100ms = 0;
- smg_time_100ms++;
- if(smg_time_100ms>=10){
- miao++;
- smg_time_100ms = 0;
- }
-
-
- if (miao>=60)
- {
- miao=0;
- fen++;
- if(fen>=60)
- {
- fen=0;
- shi++;
- if(shi>=24)
- {
- shi=0;
- }
- }
- }
-
-
- if(miao >= 60){
- miao = miao-60;
- fen++;
- }
- if(fen>=60){
- fen = fen-60;
- shi ++;
- }
- if(shi>= 24){
- shi = shi -24;
-
- }
-
-
- miao_shi=miao/10;
- miao_ge=miao%10;
-
- fen_shi=fen/10;
- fen_ge=fen%10;
-
- shi_shi=shi/10;
- shi_ge=shi%10;
-
-
- if(EN_clock == 0){
- buf[0]=smg_number[shi_shi];
- buf[1]=smg_number[shi_ge];
- buf[3]=smg_number[fen_shi];
- buf[4]=smg_number[fen_ge];
- buf[6]=smg_number[miao_shi];
- buf[7]=smg_number[miao_ge];
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
- }
- else{
- HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
- //HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
- }
-
- /* USER CODE END TIM2_IRQn 0 */
- HAL_TIM_IRQHandler(&htim2);
- /* USER CODE BEGIN TIM2_IRQn 1 */
-
- /* USER CODE END TIM2_IRQn 1 */
- }
-
- /**
- * @brief This function handles TIM3 global interrupt.
- */
- void TIM3_IRQHandler(void)
- {
- /* USER CODE BEGIN TIM3_IRQn 0 */
- smg_xians();
- /* USER CODE END TIM3_IRQn 0 */
- HAL_TIM_IRQHandler(&htim3);
- /* USER CODE BEGIN TIM3_IRQn 1 */
-
- /* USER CODE END TIM3_IRQn 1 */
- }
-
- /**
- * @brief This function handles UART4 global interrupt.
- */
- void UART4_IRQHandler(void)
- {
- /* USER CODE BEGIN UART4_IRQn 0 */
- uart4_idle_func();
-
- /* USER CODE END UART4_IRQn 0 */
- HAL_UART_IRQHandler(&huart4);
- /* USER CODE BEGIN UART4_IRQn 1 */
-
- /* USER CODE END UART4_IRQn 1 */
- }
-
- /**
- * @brief This function handles EXTI line9 interrupt.
- */
- void EXTI9_IRQHandler(void)
- {
- /* USER CODE BEGIN EXTI9_IRQn 0 */
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
- EN_music = !EN_music;
- }
-
- if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
- if(EN_clock == 1){
- //闹钟设置成功
- alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
- alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
- alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
- alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
- alarm_clock_array_cnt++;
- if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
- EN_clock = 0;
- }
- else if(EN_clock == 0){
- //设置闹钟
- shi_shi_clock = shi_shi;
- shi_ge_clock = shi_ge;
- fen_shi_clock = fen_shi;
- fen_ge_clock = fen_ge;
- miao_shi_clock = 0;
- miao_ge_clock = 0;
- miao_clock = 0;
- shi_clock = shi;
- fen_clock = fen;
- EN_clock = 1;
- }
- }
-
-
-
-
-
-
- /* USER CODE END EXTI9_IRQn 0 */
- HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
- /* USER CODE BEGIN EXTI9_IRQn 1 */
-
- /* USER CODE END EXTI9_IRQn 1 */
- }
-
- /**
- * @brief This function handles RCC wake-up interrupt.
- */
- void RCC_WAKEUP_IRQHandler(void)
- {
- /* USER CODE BEGIN RCC_WAKEUP_IRQn 0 */
-
- /* USER CODE END RCC_WAKEUP_IRQn 0 */
- HAL_RCC_WAKEUP_IRQHandler();
- /* USER CODE BEGIN RCC_WAKEUP_IRQn 1 */
-
- /* USER CODE END RCC_WAKEUP_IRQn 1 */
- }
-
- /* USER CODE BEGIN 1 */
-
- /* USER CODE END 1 */
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- mode = music
- mode = clock
- mode = sensor
-
- music volume increase
- music volume reduction
- music speed increase
- music speed reduction
- music next song
- music previous song
- music start
- music stop
-
- clock shi =
- clock fen =
- clock miao =
- clock delay shi =
- clock delay fen =
- clock delay miao =
-
- time shi = ;fen = ;miao =
- clock delay list
- clock stop list =
- clock stop stop
-
- sensor humidity_min =
- sensor temperature_max =
- sensor temperature start
- sensor humidity start
- sensor temperature stop
- sensor humidity stop
- sensor list
- sensor Temp_Code RH_Code
Versión híbrida STM32
Este diseño es un sistema multifuncional altamente integrado basado en el microcontrolador STM32MP157A. Logra interacciones y funciones ricas al integrar múltiples módulos como zumbador, tubo digital, pantalla de matriz de puntos, sensor de temperatura y humedad, luces LED y botones. El sistema utiliza STM32CUBEIDE como plataforma de desarrollo, aprovechando al máximo el alto rendimiento y la flexibilidad del microcontrolador STM32MP157A, lo que demuestra su amplio potencial de aplicación en el diseño de sistemas integrados.
Diseño modular: Este diseño adopta una idea de diseño modular. Diferentes módulos funcionales (como despertador, caja de música, monitoreo de temperatura y humedad) se diseñan e integran de forma independiente, lo que no solo mejora la capacidad de mantenimiento y escalabilidad del sistema, sino que también hace que cada módulo. Más flexible. La implementación funcional es más clara.
Cambio de modo flexible: El cambio flexible entre diferentes modos (reloj despertador, caja de música, monitoreo de temperatura y humedad) se realiza a través de comunicación en serie, lo que permite a los usuarios seleccionar fácilmente las funciones requeridas según sus necesidades, mejorando la facilidad de uso y la practicidad del sistema.
Visualización e interacción diversas : La pantalla de matriz de puntos muestra diferentes caracteres chinos (como "campana", "yin", "chuan") en diferentes modos, mostrando intuitivamente el modo de trabajo actual y mejorando la experiencia del usuario. Al mismo tiempo, la combinación de botones y control del puerto serie permite a los usuarios operar el sistema de diversas maneras, como ajustar la velocidad y el volumen de reproducción de música, cambiar canciones, ajustar la hora de la alarma, configurar múltiples alarmas, etc., lo que en gran medida enriquece la funcionalidad del sistema.
Monitoreo y ajuste de temperatura y humedad.: El sistema integra un sensor de temperatura y humedad, que puede monitorear la temperatura y humedad ambiente en tiempo real y ajustar los límites superior e inferior de temperatura y humedad a través del puerto serie Cuando la temperatura y la humedad exceden el rango establecido, el límite. El aviso se proporciona a través de luces LED, realizando un monitoreo y ajuste inteligente del entorno.
Plataforma de desarrollo eficiente: Utilizando STM32CUBEIDE como plataforma de desarrollo, utilizando sus potentes funciones de edición, compilación y depuración de código, así como funciones de biblioteca enriquecidas y proyectos de muestra, mejora en gran medida la eficiencia del desarrollo y reduce la dificultad del desarrollo.
Demostración de capacidades integrales de aplicación: Este diseño no solo demuestra las poderosas funciones del microcontrolador STM32MP157A en el diseño de sistemas integrados, sino que también refleja las capacidades integrales de aplicación del diseñador en la selección de hardware, diseño de circuitos, programación de software, depuración de sistemas, etc.
En resumen, este diseño es un sistema integrado que integra multifuncionalidad, flexibilidad y facilidad de uso, lo que demuestra plenamente las amplias perspectivas de aplicación y el potencial del microcontrolador STM32MP157A en el diseño de sistemas complejos. Mediante la implementación de este diseño, no solo se profundiza la comprensión del diseño de sistemas integrados, sino que también se mejora la capacidad de resolver problemas prácticos.

Se ha dedicado a la investigación de tecnología durante más de 30 años y domina varios lenguajes como java, linux, javascript, php, css, etc. Ha realizado muchas contribuciones en el campo del código abierto. Estación de documentación para desarrolladores para compartir algunos problemas en el desarrollo de tecnología para referencia futura.

Correo[email protected]