2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Tarkennusalgoritmit voidaan jakaa etäisyyteen, vaiheeseen ja kontrastiin.
Näistä etäisyysmenetelmä käyttää laseria (TOF, Time of Flight) ja muita aktiivisia menetelmiä kohteen etäisyyden selvittämiseksi ja tarkentamiseksi. Kaksi jälkimmäistä ovat yleisempiä.

Kontrastityyppi näkyy yllä olevassa kuvassa. Näet, että linssissä on ilmeisesti "palkeen" kaltainen edestakaisin työntö ja veto, ja paras kontrasti saadaan läpikulkemalla. Tämä tarkennusmenetelmä on suhteellisen tarkka, mutta kestää kauan.
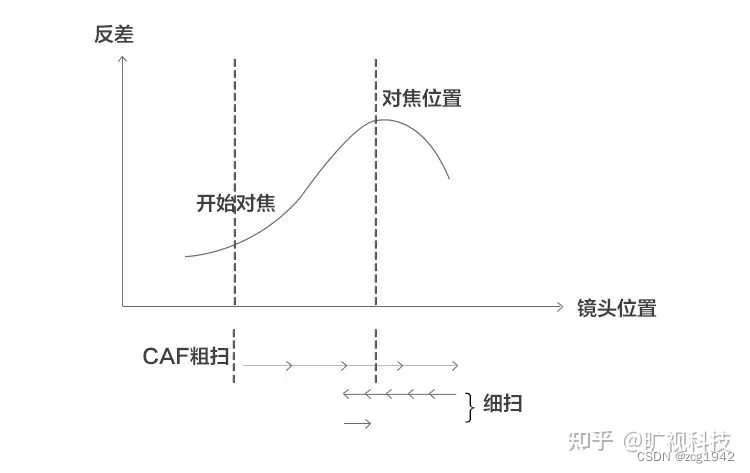
CDAF käyttää erityisesti mäkikiipeilyalgoritmia. Mäkikiipeilyalgoritmi koostuu kahdesta prosessista, joista ensimmäinen vaihe on nimeltään Coarse Search ja toinen vaihe on nimeltään Fine Search. Kun algoritmi ohjaa moottoria liikuttamaan linssiä yhteen suuntaan, kuvan kontrasti kasvaa vähitellen ja sitten vähenee, kuten vuorelle kiipeäminen.
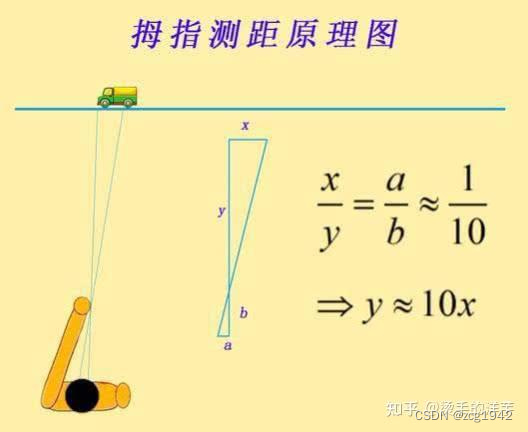
Ymmärretään ensin binokulaarinen vaikutus ja peukalon etäisyyden mittaus.
Koska molemmat silmät ovat eri asemissa, niiden parhaat tarkennuspisteet ovat erilaisia, ja kumpikin vaatii tietyn valokulman saadakseen selkeimmän kuvan. Sen vuoksi, kun mittaat peukalon etäisyyttä, käytä kahta silmää peukaloa kohti. Näiden kahden pisteen pituus / pupillietäisyys = tavoiteetäisyys / käsivarren pituus.
Koska peukalon etäisyysmittauksella voidaan mitata etäisyyttä, sama pätee PDAF:iin. PDAF mittaa ROI-alueen terävyyttä pikseliparin (PD Pixel Pair) vaihe-eron perusteella.
Joten mikä on vaihe-ero? Miten PDAF käyttää vaihe-eroa?
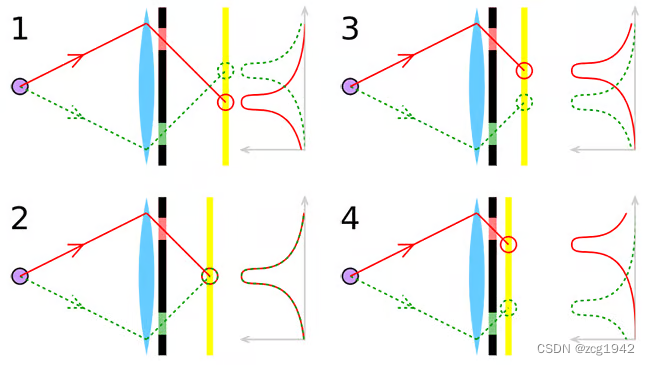
Vaikka yllä olevassa kuvassa on piirretty vain yksi valoviiva (symmetrinen), itse asiassa se ei ole yksi valoviiva, joten anturin vaste jakautuu sen kanssa huippuna. Jos tarkennus ei ole hyvä, tulee kaksi aallonhuippua. Alakuva 4 on vähemmän tarkennettu kuin alakuva 3, ja kahden aallon huipun välinen etäisyys on kauempana. Täydellisen tarkennuksen aikana kaksi huippua menevät päällekkäin.
Symmetrian vuoksi näiden kahden aallon muodot ovat samat, mutta niissä on suhteellinen siirtymä. Tämä siirtymä on vaihe-ero. Vaihe-ero voi olla positiivinen tai negatiivinen, ja selkeys on suurin, kun vaihe on 0.
Koska se kalibroidaan ennen tehtaalta lähtöä, sinun tarvitsee vain tietää vaihe-ero, ja moottori tietää heti, mihin suuntaan linssi työnnetään ja kuinka pitkälle sitä työnnetään. Tästä syystä PD tarkentaa nopeammin. PDAF-tarkennusnopeus on yli kaksi kertaa nopeampi kuin CAF, joka on nyt valtavirta matkapuhelimissa.
Kuinka vaiheentunnistuksen automaattitarkennus toimii
Erilaistumisajatuksen perusteella aallot voidaan esittää kahdella erillisellä pisteellä. Kuinka rakentaa nämä kaksi pistettä, erilaisia PD-antureita on ilmestynyt. PD-pisteiden lukumäärän mukaan se voidaan jakaa harvaan ja globaaliin. Kaikki pikselit ovat esimerkkinä.
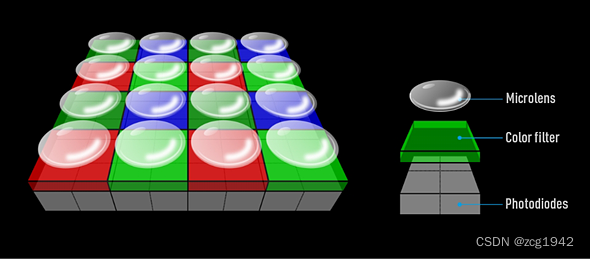
kaksois-PD jakaa edelleen kunkin pikselin. Duaalin merkitys on "kaksois", koska se kuuluu myös suoja-PD:hen, mutta verrattuna aikaisempaan L- ja R-merkkiin ne ovat kaukana toisistaan. Kaksois-PD:n vasen ja oikea PD ovat saman mikrolinssin alla.

Jokaisen värisuodattimen alla on kaksi diodia:

Tarkennusvaiheen aikana kaksi fotodiodia kuvataan erikseen Varsinaisessa kuvausvaiheessa tarkennuksen jälkeen kaksi fotodiodia yhdistetään, joten vaihe-eroista ei aiheudu häiriöitä.
Kun kaksois-PD-tekniikka ja quad-bayer yhdistetään, se on Octa PD:
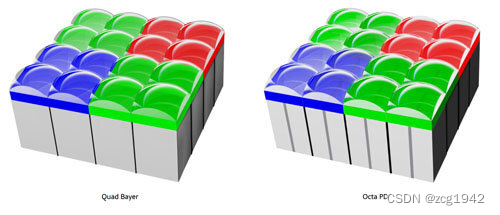
OCL on lyhenne sanoista "On-Chip Lens", joka viittaa valoherkän elementin mikrolinssiin, joka on jaettu useiden vierekkäisten pikselien kesken. On 2x1OCL ja on 2x2OCL.
2x2ocl viittaa OCL-tekniikan ja quad bayerin yhdistelmään. Neljä saman värikanavan kvadranttia jakaa linssin:
Kun valaistusolosuhteet ovat hyvät, voidaan saada korkearesoluutioisia kuvia remoiscilla Kun valaistus on huono, voidaan saada parempi kuvanlaatu biningillä.
Molemmat ovat täyden pikselin PD-tarkennuksia. Ainoa ero on, että vaihe-eron lähde on erilainen Octa PD on perinteisempi kaksois-PD, ja 2x2OCL on ero jaetun objektiivin tuomassa neljässä kvadrantissa.
Edellinen hyötyy siitä, että siinä on kaksi diodia varsinaisessa kuvantamisessa, joten se voidaan yhdistää vaihe-eron poistamiseksi, jolloin saman värikanavan neljä arvoa quad rawissa ovat yhtenäisempiä. 2x2OCL-vaihe-eroa ei voida poistaa, ja saman värikanavan neljä kvadranttia muuttuvat myös säännöllisesti kuvan gradientin mukaan kuvantamisen aikana, mikä ei edistä myöhempää kuvankäsittelyä.
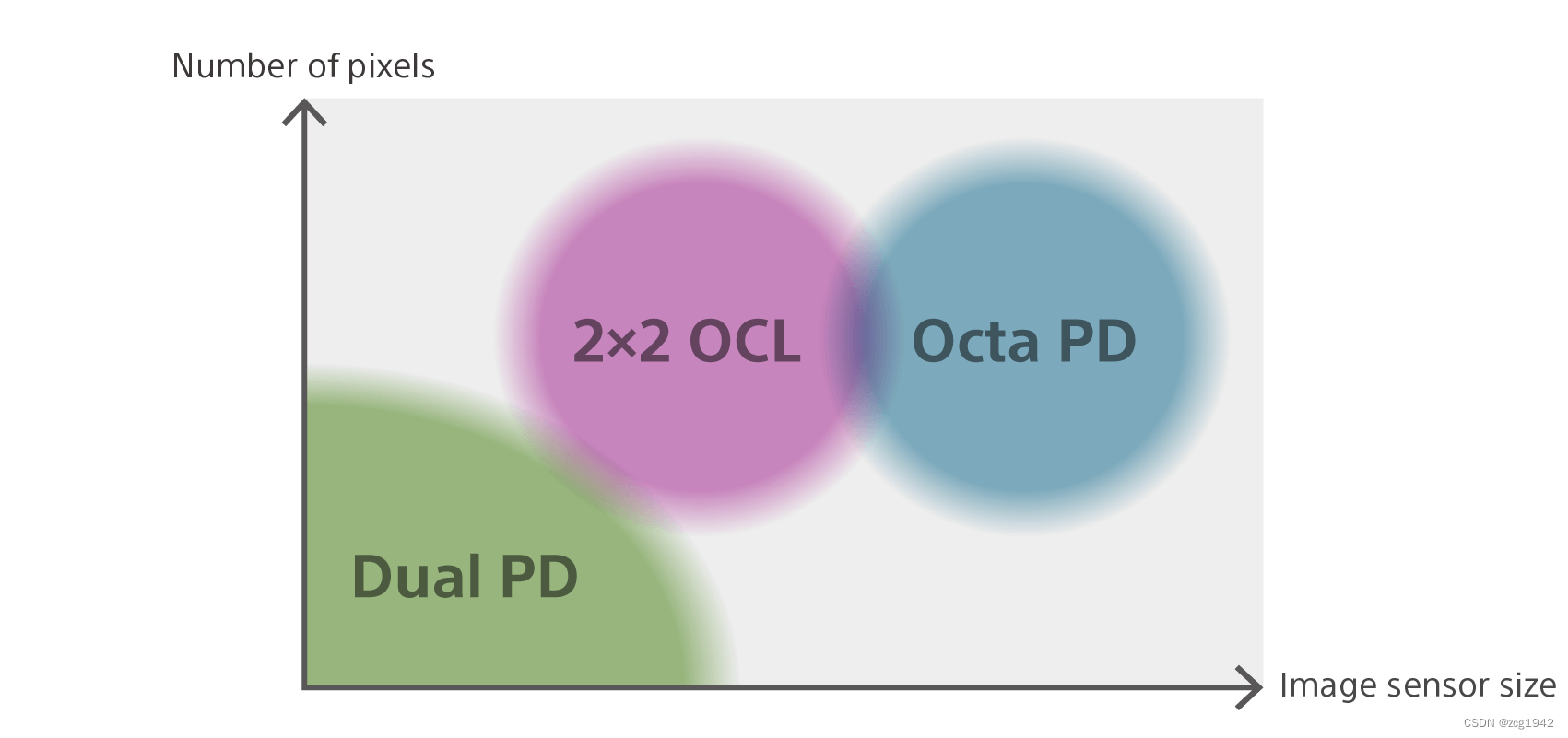
Koska Octa PD:ssä on integroitava kaksi diodia ja siinä on suurempi määrä mikrolinssejä, tätä tekniikkaa käytetään yleensä, kun anturi on suurempi keskikokoisissa antureissa. Kuten alla:
Käytännössä PD-tarkennusta käytetään yleensä ensin työntämään objektiivi nopeasti suunnilleen tarkkaan asentoon, ja sitten suoritetaan kontrastitarkennus, jotta kuva todella saavuttaa ihanteellisen suuren kontrastin.
viite:
Kaikkien pikselien automaattitarkennustekniikka (AF) | Kuvasensori mobiililaitteille | Tekniikka | Sony Semiconductor Solutions Grouphttps://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8993499 Kaikkien pikselien automaattitarkennustekniikka (AF) | Kuvasensori mobiililaitteille | Tekniikka | Sony Semiconductor Solutions Group

Hän on omistautunut teknologian tutkimukselle yli 30 vuoden ajan ja hallitsee useita kieliä, kuten java, linux, javascript, php, css jne. Hän on tehnyt paljon työtä avoimen lähdekoodin alalla Kehittäjän dokumentaatioasema jakaaksesi joitain teknologian kehittämisen ongelmia tulevaa käyttöä varten
