내 연락처 정보
우편메소피아@프로톤메일.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
초점 알고리즘은 범위 지정, 위상 및 대비로 나눌 수 있습니다.
그 중 거리 측정 방식은 레이저(TOF, Time of Flight) 등 능동 방식을 이용해 물체의 거리를 파악해 초점을 맞추는 방식이다. 후자의 두 가지가 더 일반적으로 사용됩니다.

콘트라스트 유형은 위 그림에 표시되어 있습니다. 렌즈에는 분명히 "벨로우즈"와 같은 왕복 밀고 당기기가 있으며 통과를 통해 최상의 콘트라스트 결과가 얻어지는 것을 볼 수 있습니다. 이 포커싱 방법은 비교적 정확하지만 시간이 오래 걸립니다.
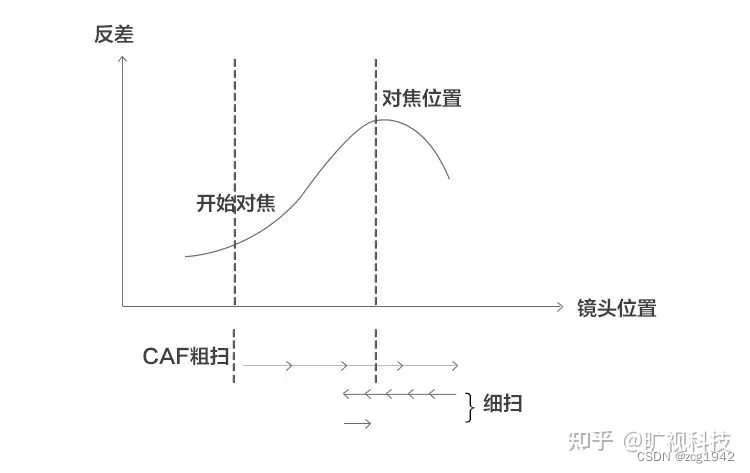
CDAF는 특히 언덕 오르기 알고리즘을 사용합니다. 언덕 오르기 알고리즘은 두 가지 과정으로 구성되는데 첫 번째 단계는 Coarse Search, 두 번째 단계는 Fine Search라고 합니다. 알고리즘이 모터를 제어하여 렌즈를 한 방향으로 움직이면 이미지 대비가 점차 증가했다가 감소합니다. 이는 마치 산을 오르는 것과 비슷합니다.
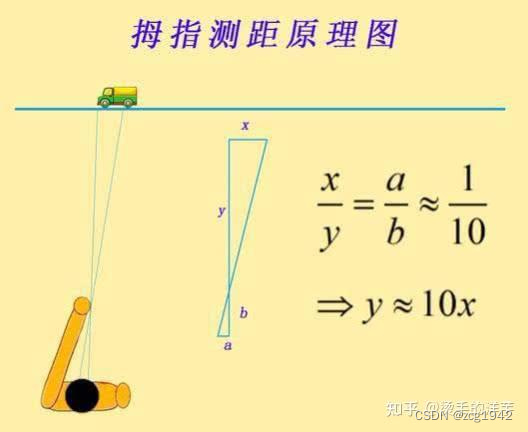
먼저 양안효과와 엄지손가락 거리 측정에 대해 알아보겠습니다.
두 눈의 위치가 다르기 때문에 가장 잘 초점을 맞추는 지점이 다르며 가장 선명한 이미지를 생성하려면 각 눈에 특정 각도의 빛이 필요합니다. 따라서 엄지손가락 거리를 측정할 때 두 눈을 각각 사용하여 엄지손가락을 향하게 하면 이 방향의 연장선을 따라 대상에서 서로 다른 두 지점을 얻을 수 있습니다. 이 두 점의 길이/동공 거리 = 목표 거리/팔 길이.
엄지손가락 범위 측정이 거리를 측정할 수 있으므로 PDAF의 경우에도 마찬가지입니다. PDAF는 픽셀 쌍(PD Pixel pair)의 위상차를 기반으로 ROI 영역의 선명도를 측정합니다.
그렇다면 위상차란 무엇일까요? PDAF는 위상차를 어떻게 사용합니까?
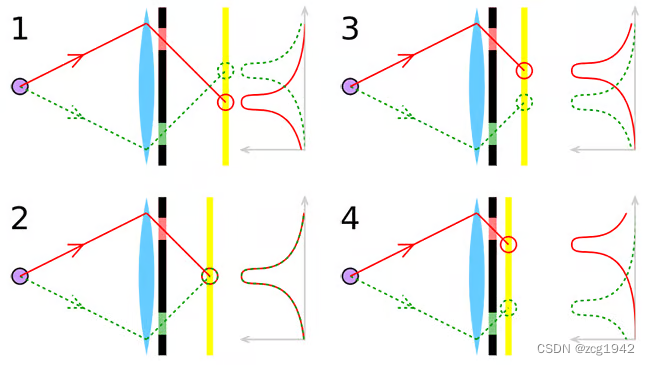
위 그림에서는 빛의 선이 한 줄만 그려져 있지만(대칭) 실제로는 빛의 한 선이 아니기 때문에 센서에 대한 반응은 이를 피크로 하여 분포됩니다. 초점이 좋지 않으면 하위 사진 4가 하위 사진 3보다 초점이 덜 맞춰지고 두 개의 파도 피크 사이의 거리가 더 멀어집니다. 초점이 완벽하게 맞춰지면 두 개의 피크가 겹칩니다.
대칭으로 인해 두 파동의 모양은 동일하지만 상대적인 오프셋이 있습니다. 이 오프셋이 위상차입니다. 위상차는 양수일 수도 있고 음수일 수도 있으며 위상이 0일 때 선명도가 가장 높습니다.
공장에서 출고되기 전에 캘리브레이션을 하기 때문에 위상차만 알면 모터가 렌즈를 어느 방향으로 밀어야 할지, 얼마나 멀리 밀어야 할지 즉각 알 수 있기 때문에 PD가 더 빨리 초점을 맞추는 것입니다. PDAF 포커싱 속도는 현재 휴대폰의 주류인 CAF보다 2배 이상 빠르다.
미분의 개념을 바탕으로 파동은 두 개의 서로 다른 점으로 표현될 수 있습니다. 이 두 지점을 구성하는 방법에 따라 다양한 PD 센서가 등장했습니다. PD 포인트의 개수에 따라 Sparse와 Global로 나눌 수 있습니다. 우리 모두는 All-pixel을 예로 들어보겠습니다.
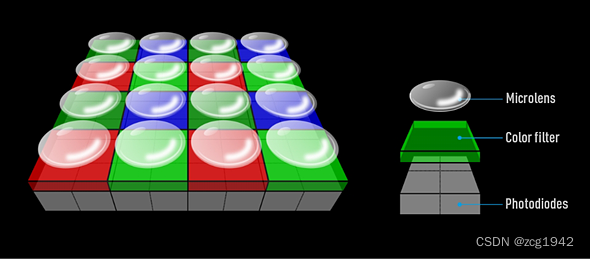
듀얼 PD는 각 픽셀을 더욱 세분화합니다. 듀얼 PD의 의미는 "이중"입니다. 왜냐하면 이것도 쉴드 PD에 속하기 때문입니다. 그러나 이전 L과 R에 비해 듀얼 PD의 왼쪽과 오른쪽 PD는 동일한 마이크로렌즈 아래에 있습니다.

각 컬러 필터 아래에는 두 개의 다이오드가 있습니다.

포커싱 단계에서는 두 개의 포토다이오드가 별도로 이미지화됩니다. 포커싱 후 실제 이미징 단계에서는 두 개의 포토다이오드가 결합되므로 위상차로 인한 간섭이 없습니다.
듀얼 PD 기술과 쿼드 베이어를 결합하면 Octa PD가 됩니다.
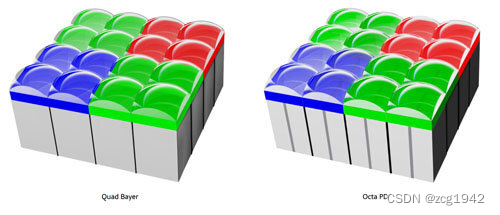
OCL은 "On-Chip Lens"의 약어로, 여러 인접 픽셀이 공유하는 감광성 요소의 마이크로렌즈를 나타냅니다. 2x1OCL이 있고 2x2OCL이 있습니다.
2x2ocl은 OCL 기술과 쿼드 베이어의 조합을 의미합니다. 동일한 색상 채널의 4개 사분면이 렌즈를 공유합니다.
조명 조건이 좋으면 remoisc를 통해 고해상도 영상을 얻을 수 있으며, 조명 조건이 나쁠 경우 비닝을 통해 더 좋은 화질을 얻을 수 있습니다.
둘 다 풀픽셀 PD 포커싱입니다. 유일한 차이점은 위상차의 원인이 다르다는 것입니다. Octa PD는 보다 전통적인 듀얼 PD이고, 2x2OCL은 공유 렌즈에 의해 발생하는 4사분면의 차이입니다.
전자는 실제로 이미징할 때 다이오드를 2개 갖는 이점이 있기 때문에 결합하여 위상차를 제거할 수 있으므로 Quad Raw에서 동일한 색상 채널의 4개 값이 더욱 통일됩니다. 2x2OCL 위상차는 제거할 수 없으며 동일한 색상 채널의 4개 사분면도 이미징 중에 이미지 그라데이션에 따라 규칙적으로 변경되므로 후속 이미지 처리에 도움이 되지 않습니다.
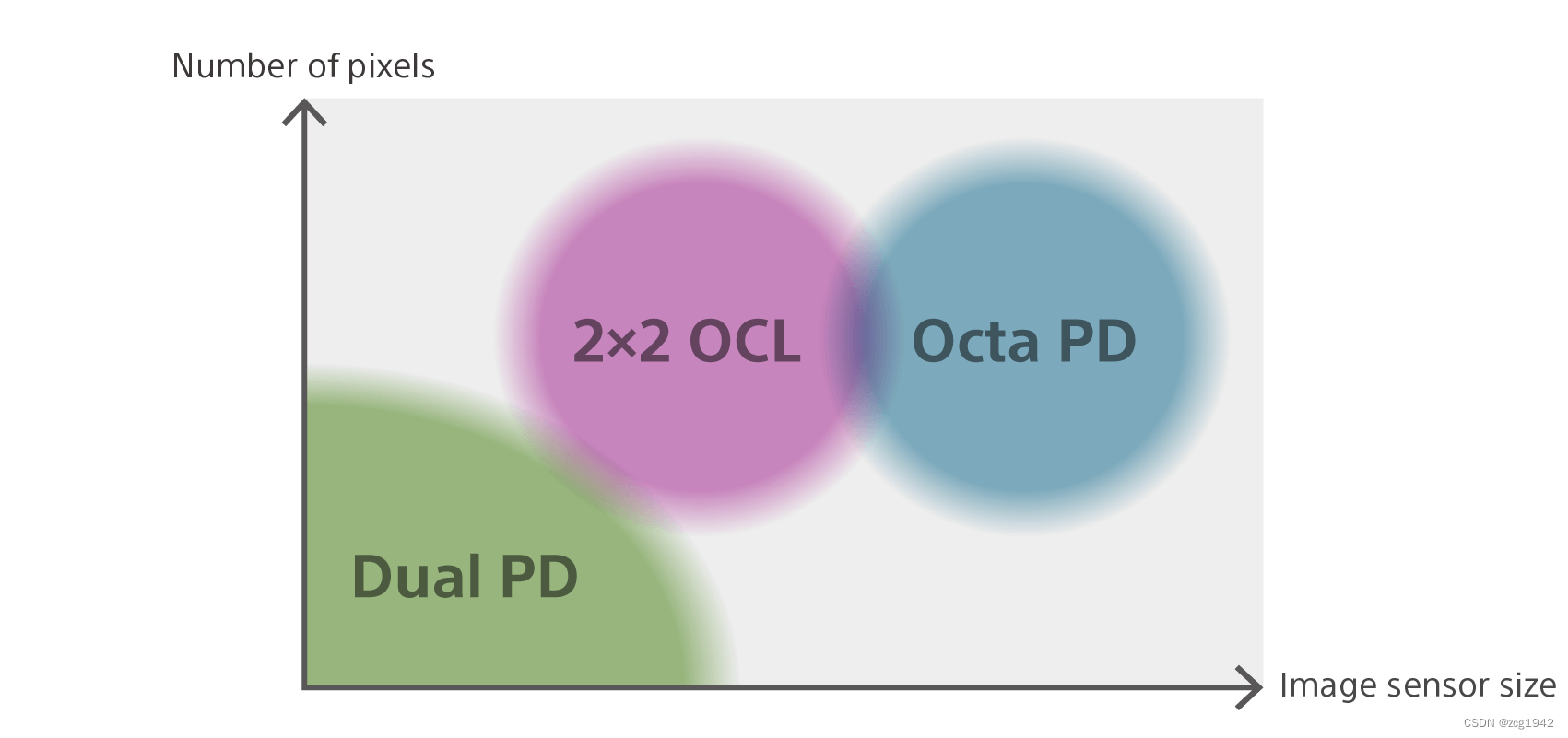
Octa PD는 두 개의 다이오드를 통합해야 하고 더 많은 수의 마이크로렌즈를 가지고 있기 때문에 이 기술은 일반적으로 OCL이 중형 센서에 사용될 때 사용됩니다. 아래 그림과 같이:
실제로 PD 포커싱은 일반적으로 렌즈를 대략 정확한 위치로 신속하게 밀어넣기 위해 먼저 사용된 다음 이미지가 고대비라는 이상적인 상태를 실제로 달성할 수 있도록 대비 포커싱을 수행합니다.
참조:
모든 픽셀 자동 초점(AF) 기술 | 모바일용 이미지 센서 | 기술 | Sony Semiconductor Solutions Grouphttps://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8993499모든 픽셀 자동 초점(AF) 기술 | 모바일용 이미지 센서 | 기술 | Sony Semiconductor Solutions Group
https://www.ovt.com/products/ov50a/
소니, 쿼드 베이어 센서용 2x2 온칩 렌즈 기술 공개, 더 나은 AF 성능 약속 - GSMArena.com 뉴스

그는 30년 이상 기술 연구에 전념해 왔으며, java, linux, javascript, php, css 등 다양한 언어에 능숙하며, 오픈 소스 분야에 많은 공헌을 했습니다. 나중에 참조할 수 있도록 기술 개발의 일부 문제를 공유하는 개발자 문서 스테이션입니다.

우편메소피아@프로톤메일.com