私の連絡先情報
郵便メール:
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
フォーカス アルゴリズムは、測距、位相、コントラストに分類できます。
このうち測距方式は、レーザー(TOF、Time of Flight)などの能動方式を利用して物体の距離を知り、焦点を合わせます。後者の 2 つはより一般的に使用されます。

上の写真はコントラストタイプを示しています。明らかにレンズが「蛇腹」のような往復運動をしており、トラバースによって最高のコントラストの結果が得られることがわかります。この焦点合わせ方法は比較的正確ですが、時間がかかります。
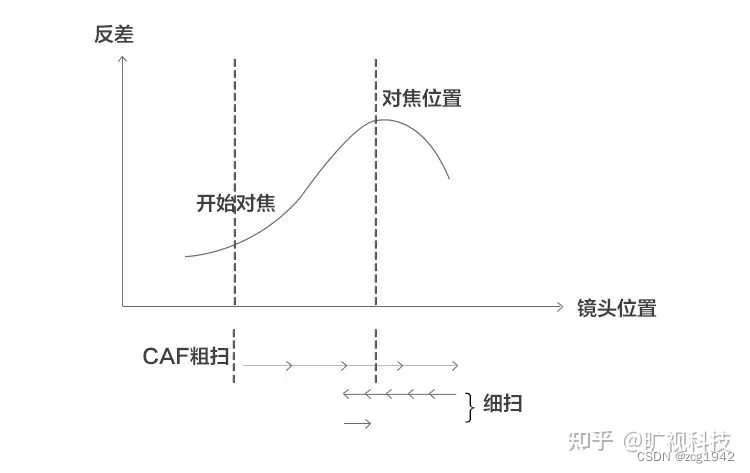
CDAF は特に山登りアルゴリズムを使用します。山登りアルゴリズムは 2 つのプロセスで構成され、第 1 段階は粗い検索と呼ばれ、第 2 段階は細かい検索と呼ばれます。アルゴリズムがモーターを制御してレンズを一方向に動かすと、山を登るように、画像のコントラストが徐々に増加してから減少します。
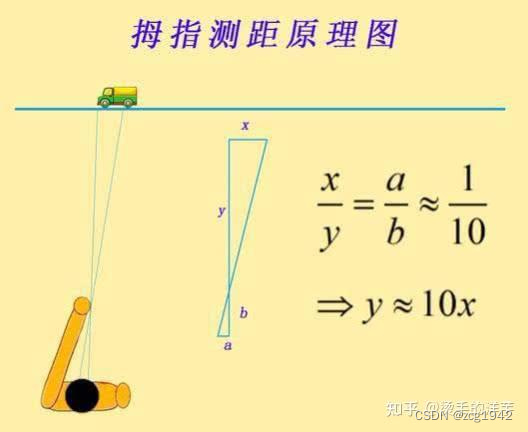
まずは両眼視効果と親指の距離測定について理解しましょう。
2 つの目は異なる位置にあるため、最適な焦点が異なり、最も鮮明な画像を作成するにはそれぞれ特定の光の角度が必要です。したがって、親指の距離を測定するときは、親指に向かって 2 つの目を使用すると、この方向の延長線上にある 2 つの異なる点が得られます。これら 2 点の長さ/瞳孔距離 = ターゲット距離/腕の長さ。
親指測距では距離を測定できるため、PDAF についても同様です。 PDAF は、ピクセル ペア (PD ピクセル ペア) の位相差に基づいて ROI 領域の鮮明さを測定します。
では、位相差とは何でしょうか? PDAF は位相差をどのように使用しますか?
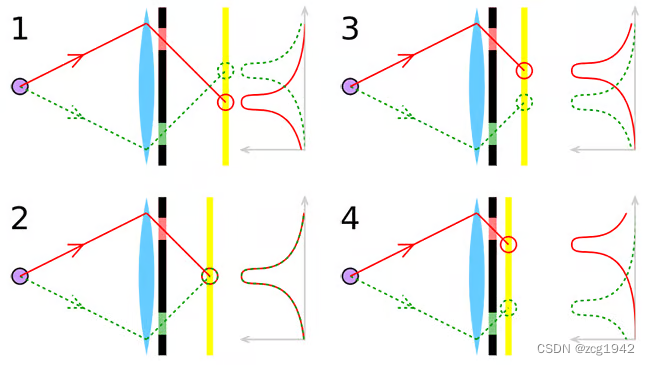
上の図では光の線が1本しか描かれていませんが(左右対称)、実際には1本の光ではなく、センサー上の応答はそれをピークとして分布します。焦点が合っていない場合、2 つの波のピークが存在します。サブ画像 4 はサブ画像 3 よりも焦点が合っておらず、2 つの波のピーク間の距離はさらに離れています。完全に焦点が合っている場合、2 つのピークは重なり合います。
対称性があるため、2 つの波の形状は同じですが、相対的なオフセットが存在します。このオフセットが位相差となります。位相差は正または負の場合があり、位相が 0 のときの明瞭度が最も高くなります。
工場出荷前にキャリブレーションが行われるため、位相差を知るだけで、レンズをどの方向にどれくらい押し込むべきかをモーターが即座に認識するため、PD の焦点合わせが速くなります。 PDAFはCAFに比べて2倍以上の合焦速度があり、現在携帯電話では主流となっています。
微分の考え方に基づいて、波は 2 つの異なる点で表すことができます。この2点をどのように構築するかで、さまざまなPDセンサーが登場しています。 PD ポイントの数に応じて、スパースとグローバルに分類できます。私たちは皆、オールピクセルを例として取り上げます。
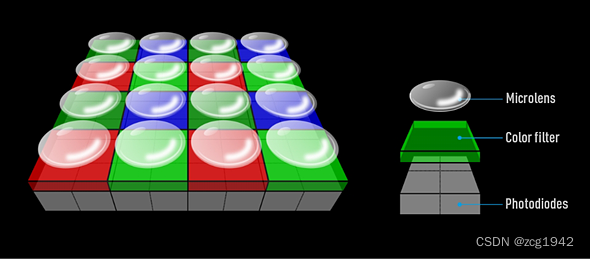
デュアル PD は各ピクセルをさらに細分化します。 デュアルの意味は「二重」で、シールド PD にも属しますが、以前の L と R に比べて、デュアル PD の左右の PD は同じマイクロレンズの下にあります。

各カラー フィルターの下には 2 つのダイオードがあります。

焦点合わせ段階では 2 つのフォトダイオードが別々に撮像され、焦点合わせ後の実際の撮像段階では 2 つのフォトダイオードが結合されるため、位相差による干渉は発生しません。
デュアル PD テクノロジーとクアッド ベイヤーを組み合わせると、Octa PD になります。
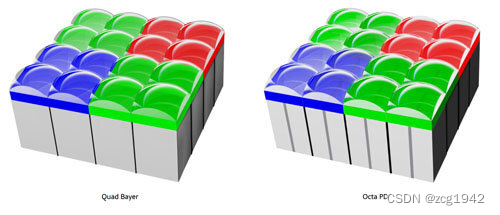
OCL は「On-Chip Lens」の略称で、隣接するいくつかのピクセルで共有される感光素子上のマイクロレンズを指します。 2x1OCL と 2x2OCL があります。
2x2ocl は、OCL テクノロジーとクアッド ベイヤーの組み合わせを指します。同じカラー チャネルの 4 つの象限がレンズを共有します。
照明条件が良い場合は、リモイスクを使用すると高解像度の画像が得られます。照明条件が悪い場合は、ビニングを使用するとより良い画質が得られます。
どちらもフルピクセルPDフォーカスです。唯一の違いは、位相差の発生源が異なることです。Octa PD はより伝統的なデュアル PD であり、2x2OCL は共有レンズによって引き起こされる 4 象限の差です。
前者は、実際のイメージング時に 2 つのダイオードを備えているため、位相差をなくすために組み合わせることができるため、Quad Raw により同じカラー チャネルの 4 つの値がより統一されるという利点があります。 2x2OCL の位相差は排除できず、同じカラー チャネルの 4 つの象限もイメージング中の画像勾配に応じて規則的に変化するため、その後の画像処理には役立ちません。
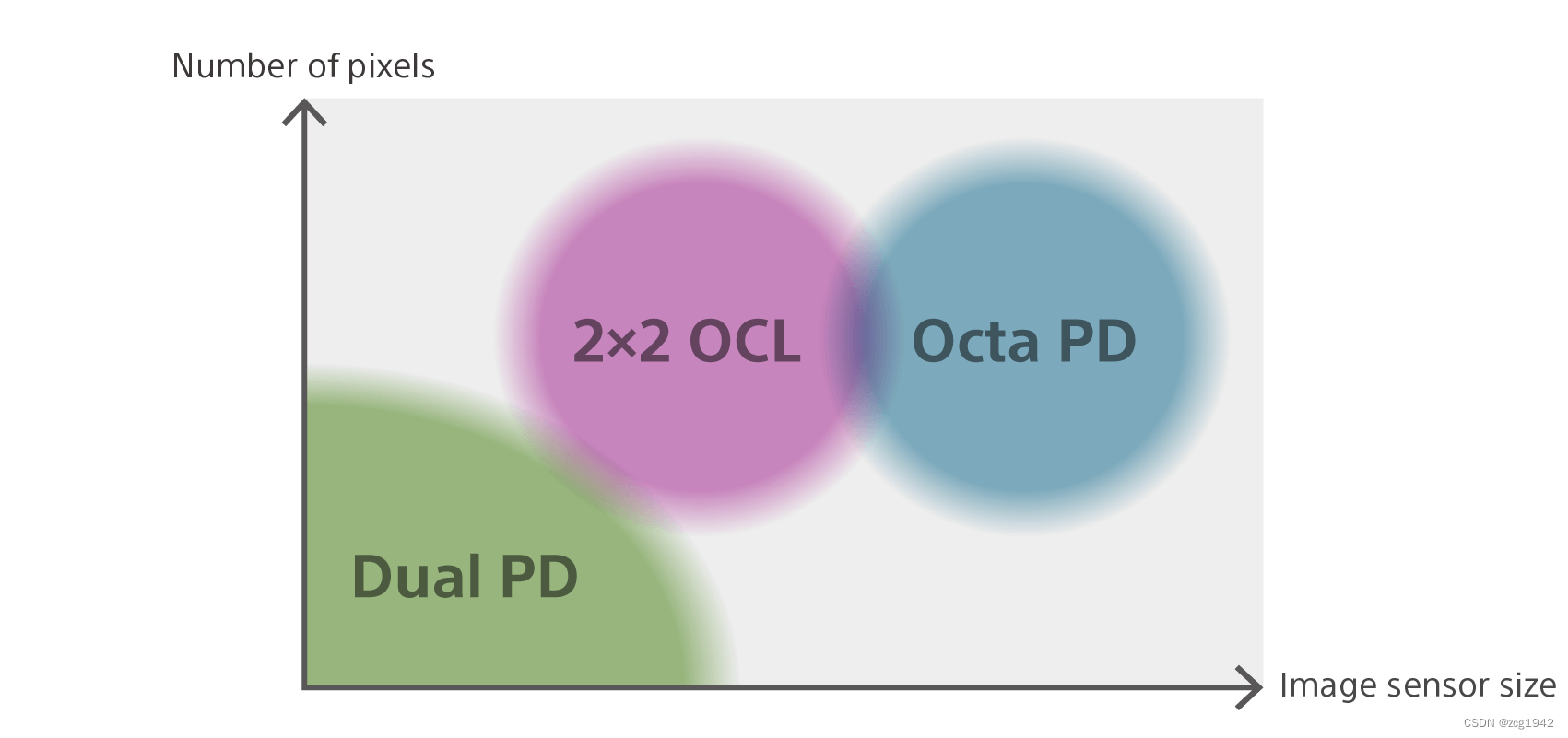
Octa PD は 2 つのダイオードを統合する必要があり、多数のマイクロレンズを備えているため、この技術は一般に、センサーが中型のセンサーで使用される場合に使用されます。以下に示すように:
実際には、通常、最初に PD フォーカシングを使用してレンズをほぼ正確な位置にすばやく押し込み、次にコントラスト フォーカシングを実行して、画像が理想的な高コントラストの状態を真に達成できるようにします。
参照:
全画素オートフォーカス(AF)技術 | モバイル向けイメージセンサー | テクノロジー | ソニーセミコンダクタソリューションズグループhttps://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8993499全画素オートフォーカス(AF)技術 | モバイル向けイメージセンサー | テクノロジー | ソニーセミコンダクタソリューションズグループ
ソニー、クアッドベイヤーセンサー用の 2x2 オンチップレンズ技術を発表、AF 性能の向上を約束 - GSMArena.com ニュース

彼は 30 年以上テクノロジーの研究に専念しており、java、linux、javascript、php、css などのさまざまな言語に堪能であり、オープンソース分野で多くの貢献を行っています。将来の参考のために技術開発におけるいくつかの問題を共有する開発者ドキュメント ステーション。

郵便メール: