minhas informações de contato
Correspondência[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Os algoritmos de foco podem ser divididos em alcance, fase e contraste.
Entre eles, o método de alcance utiliza laser (TOF, Tempo de Voo) e outros métodos ativos para saber a distância do objeto e depois focar. Os dois últimos são mais comumente usados.

O tipo de contraste é mostrado na imagem acima. Você pode ver que a lente obviamente tem um movimento alternativo de empurrar e puxar, e o resultado com o melhor contraste é obtido através do percurso. Este método de focagem é relativamente preciso, mas demora muito tempo.
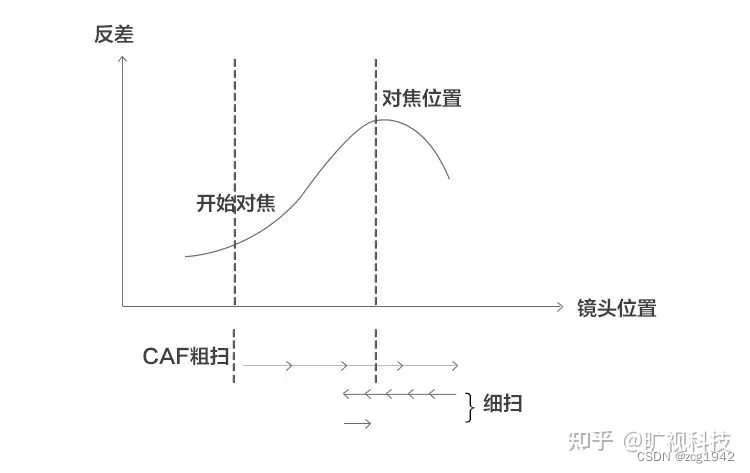
O CDAF usa especificamente o algoritmo de escalada. O algoritmo de escalada consiste em dois processos, o primeiro estágio é denominado Pesquisa Grosseira e o segundo estágio é denominado Pesquisa Fina. Quando o algoritmo controla o motor para mover a lente em uma direção, o contraste da imagem aumenta gradualmente e depois diminui, semelhante a subir uma montanha.
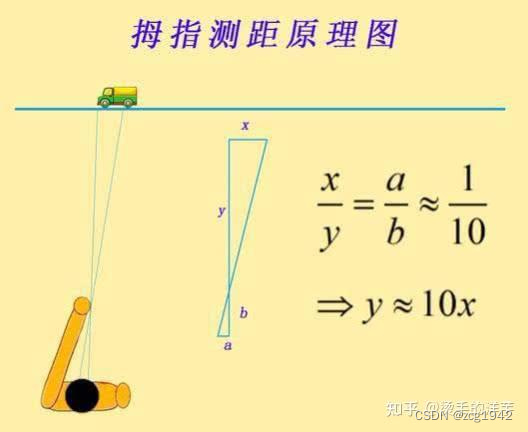
Vamos primeiro entender o efeito binocular e a medição da distância do polegar.
Como os dois olhos estão em posições diferentes, seus melhores pontos de foco são diferentes e cada um requer um ângulo de luz específico para criar a imagem mais nítida. Portanto, ao medir a distância do polegar, use dois olhos voltados para o polegar, respectivamente. Dois pontos diferentes podem ser obtidos no alvo ao longo da linha de extensão nesta direção. O comprimento destes dois pontos/distância pupilar = distância alvo/comprimento do braço.
Como a variação do polegar pode medir distâncias, o mesmo se aplica ao PDAF. O PDAF mede a nitidez da área ROI com base na diferença de fase do par de pixels (PD Pixel Pair).
Então, qual é a diferença de fase? Como o PDAF usa a diferença de fase?
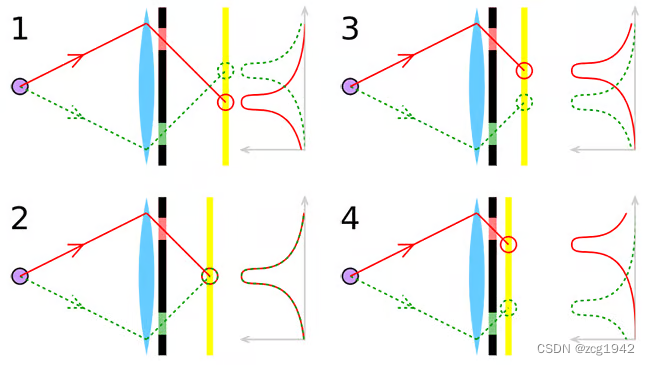
Embora apenas uma linha de luz seja desenhada na imagem acima (simétrica), na verdade não é uma linha de luz, então a resposta no sensor é distribuída com ela como o pico. Se o foco não for bom, haverá dois picos de onda. A subimagem 4 está menos focada do que a subimagem 3 e a distância entre os dois picos de onda é mais distante. Quando em foco perfeito, os dois picos se sobrepõem.
Devido à simetria, as formas das duas ondas são iguais, mas há um deslocamento relativo. Esse deslocamento é a diferença de fase. A diferença de fase pode ser positiva ou negativa, e a clareza é maior quando a fase é 0.
Por ser calibrado antes de sair da fábrica, você só precisa saber a diferença de fase, e o motor saberá imediatamente em que direção empurrar a lente e até que ponto empurrá-la. É por isso que o PD foca mais rápido. A velocidade de foco do PDAF é duas vezes mais rápida que a CAF, que agora é a principal opção em telefones celulares.
Como funciona o foco automático de detecção de fase
Partindo da ideia de diferenciação, as ondas podem ser representadas por dois pontos distintos. Como construir esses dois pontos, surgiram vários sensores PD. De acordo com o número de pontos PD, pode ser dividido em esparso e global. Todos nós tomamos All-pixel como exemplo.
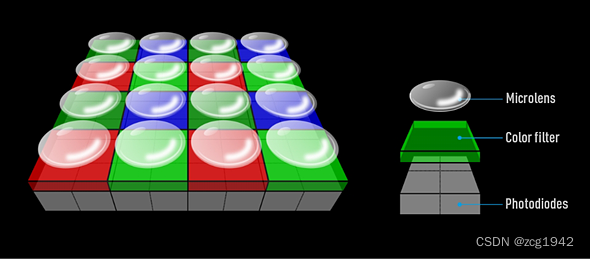
dual PD subdivide ainda mais cada pixel. O significado de dual é "duplo", porque também pertence ao escudo PD, mas em comparação com os anteriores L e R, eles estão distantes um do outro. O PD esquerdo e direito do PD duplo estão sob as mesmas microlentes:

Existem dois diodos em cada filtro de cor:

Durante o estágio de focagem, os dois fotodiodos são fotografados separadamente. Durante o estágio de imagem real, após o foco, os dois fotodiodos são combinados, de modo que não haverá interferência de diferenças de fase.
Quando a tecnologia dual PD e quad bayer são combinadas, é Octa PD:
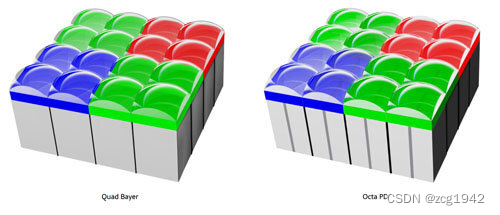
OCL é a abreviatura de "On-Chip Lens", que se refere às microlentes no elemento fotossensível compartilhadas por vários pixels adjacentes. Existe 2x1OCL e existe 2x2OCL.
2x2ocl refere-se à combinação da tecnologia OCL e quad bayer. Quatro quadrantes do mesmo canal de cor compartilham uma lente:
Quando as condições de iluminação são boas, imagens de alta resolução podem ser obtidas através do remoisc. Quando as condições de iluminação são ruins, uma melhor qualidade de imagem pode ser obtida através do bining.
Ambos têm foco PD de pixel completo. A única diferença é que a fonte da diferença de fase é diferente. Octa PD é um PD duplo mais tradicional, e 2x2OCL é a diferença nos quatro quadrantes trazidos pela lente compartilhada.
O primeiro se beneficia de ter dois diodos na hora de gerar imagens, de modo que pode ser combinado para eliminar a diferença de fase, de modo que os quatro valores do mesmo canal de cor no quad raw sejam mais unificados. A diferença de fase 2x2OCL não pode ser eliminada, e os quatro quadrantes do mesmo canal de cor também mudarão regularmente com o gradiente da imagem durante a imagem, o que não favorece o processamento subsequente da imagem.
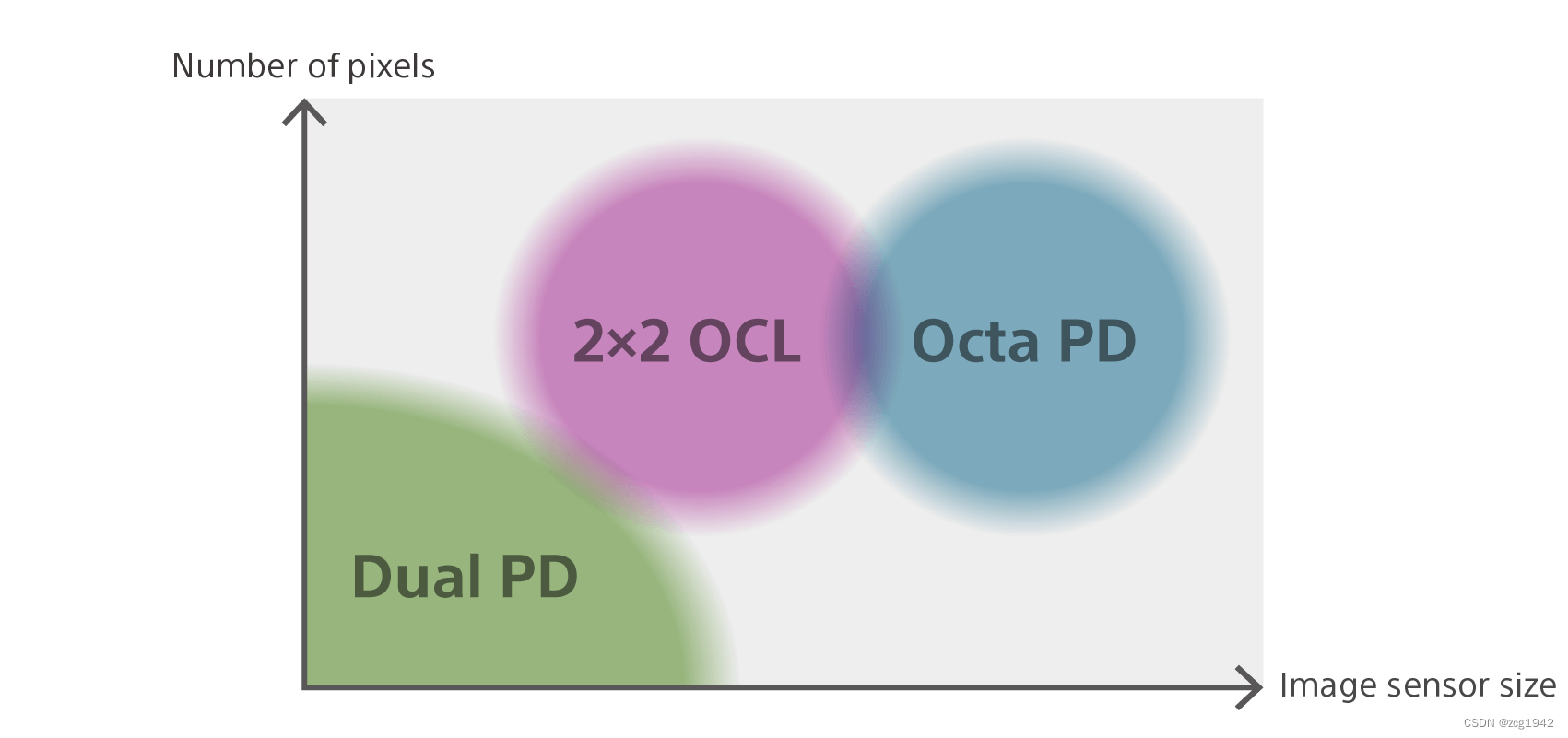
Como o Octa PD precisa integrar dois diodos e possui um número maior de microlentes, essa tecnologia geralmente é usada quando o sensor OCL é usado em sensores de médio porte; Como mostrado abaixo:
Na prática, a focagem PD é geralmente usada primeiro para empurrar rapidamente a lente para uma posição aproximadamente precisa e, em seguida, a focagem de contraste é realizada para permitir que a imagem alcance verdadeiramente o estado ideal de alto contraste.
referência:
Tecnologia de foco automático (AF) All-pixel | Sensor de imagem para celular | Tecnologia | Sony Semiconductor Solutions Grouphttps://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8993499Tecnologia de foco automático (AF) All-pixel | Sensor de imagem para celular | Tecnologia | Sony Semiconductor Solutions Group

Ele se dedica à pesquisa de tecnologia há mais de 30 anos e é proficiente em diversas linguagens como java, linux, javascript, php, css, etc. estação de documentação do desenvolvedor para compartilhar alguns problemas no desenvolvimento de tecnologia para referência futura.

Correspondência[email protected]