2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Inhaltsverzeichnis
3. Definieren Sie die Richtungsberechnungsfunktion
4. Extrahieren Sie die erforderlichen Informationen aus der TXT-Datei
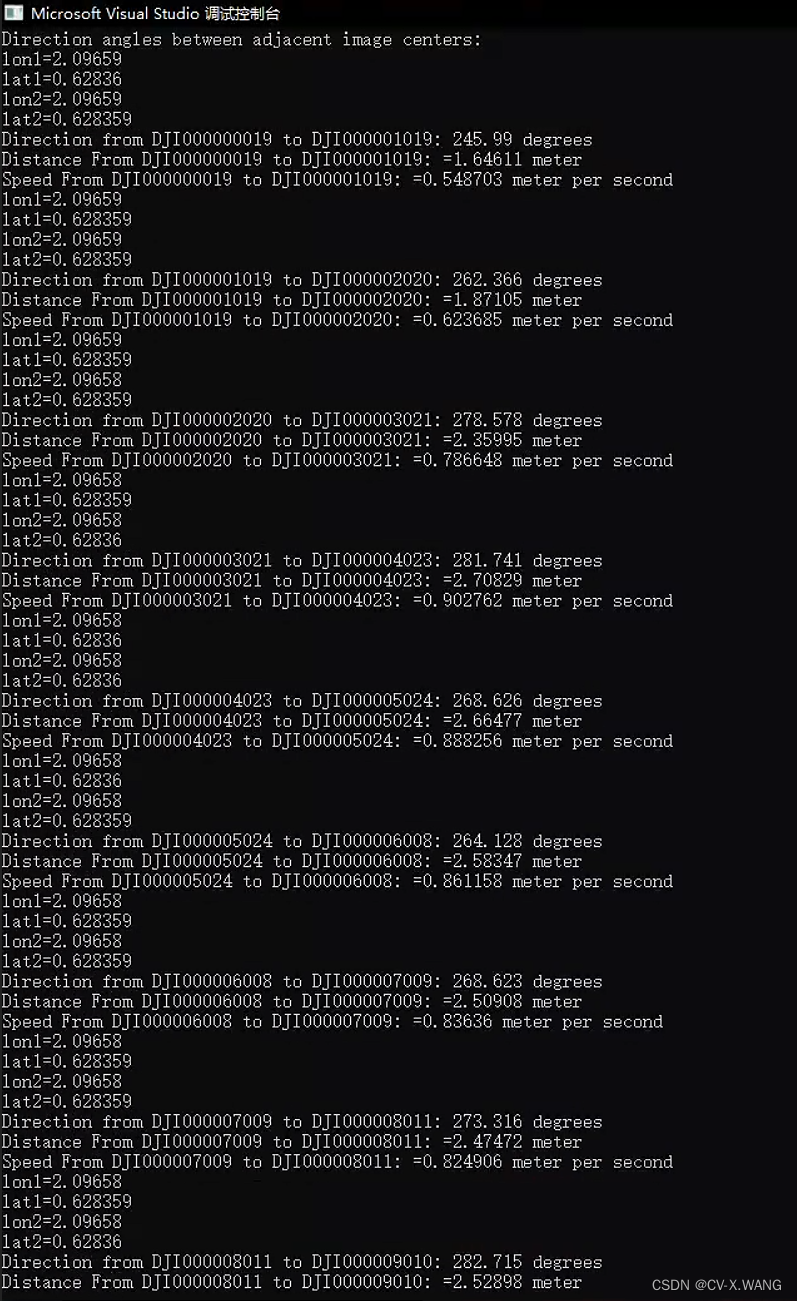
5. Berechnen Sie den Richtungsänderungswinkel des Ziels zwischen benachbarten Fotos
6. Berechnen Sie die Bewegungsentfernung und Geschwindigkeit des Ziels zwischen benachbarten Fotos
- //字符串分割
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
#define M_PI 3.14159265358979323846 // piUm die Bewegungsrichtung des Ziels in Flugzeugrichtung zu ermitteln, wird in diesem Artikel die im militärischen Bereich übliche 360°-Richtungsmethode verwendet. Das heißt, der wahre Norden ist die Richtung von 0° und die Richtung im Uhrzeigersinn ist 0-360°. Beispielsweise ist die wahre Ostrichtung: In unserem Richtungssystem ist es die 90°-Richtung.
einige,
doppelte lon1_rad = lon1 * M_PI / 180,0;
doppelte lat1_rad = lat1 * M_PI / 180,0;
doppelte lon2_rad = lon2 * M_PI / 180,0;
doppelte lat2_rad = lat2 * M_PI / 180,0;
Es wird im Bogenmaß angegeben.
- //方向函数
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
Bitte beachten Sie: Die Berechnungsformel für die Entfernung, die wir hier erhalten, lautet:

Dies ist nur die einfachste Demonstration. In tatsächlichen Situationen müssen wir eine Reihe von Bedingungen wie das Koordinatensystem, die Position des Messbereichs usw. berücksichtigen, um eine genauere Entfernung zu erhalten.
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- #include <iostream>
- #include <fstream>
- #include <sstream>
- #include <vector>
- #include <cmath>
-
- using namespace std;
- #define M_PI 3.14159265358979323846 // pi
- // Function to split a string by a delimiter
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
-
- // direction angle in degrees
- //原理是 在平面上以正北方向为0°方向,顺时针为0-360°
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- int main() {
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
-
- // Calculate direction angles between adjacent image centers
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
-
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- //cin.get();
-
- return 0;
- }

Er widmet sich seit mehr als 30 Jahren der Technologieforschung und beherrscht verschiedene Sprachen wie Java, Linux, Javascript, PHP, CSS usw. Er hat viele Beiträge im Open-Source-Bereich geleistet Entwicklerdokumentationsstation, um einige Themen in der Technologieentwicklung als zukünftige Referenz zu teilen
