2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Table des matières
3. Définir la fonction de calcul de direction
4. Extrayez les informations requises du fichier txt
5. Calculez l'angle de changement de direction de la cible entre les photos adjacentes
6. Calculez la distance de déplacement et la vitesse de la cible entre les photos adjacentes
- //字符串分割
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
#define M_PI 3.14159265358979323846 // piAfin d'obtenir la direction de déplacement de la cible dans la direction du plan, cet article adopte la méthode de direction à 360°, courante dans le domaine militaire. Autrement dit, le nord vrai est la direction de 0° et la direction dans le sens des aiguilles d'une montre est de 0 à 360°. Par exemple, la direction est vraie : dans notre système de direction, c'est la direction de 90°.
une partie de,
double lon1_rad = lon1 * M_PI / 180.0;
double lat1_rad = lat1 * M_PI / 180.0;
double lon2_rad = lon2 * M_PI / 180.0;
double lat2_rad = lat2 * M_PI / 180,0;
C'est en radians.
- //方向函数
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
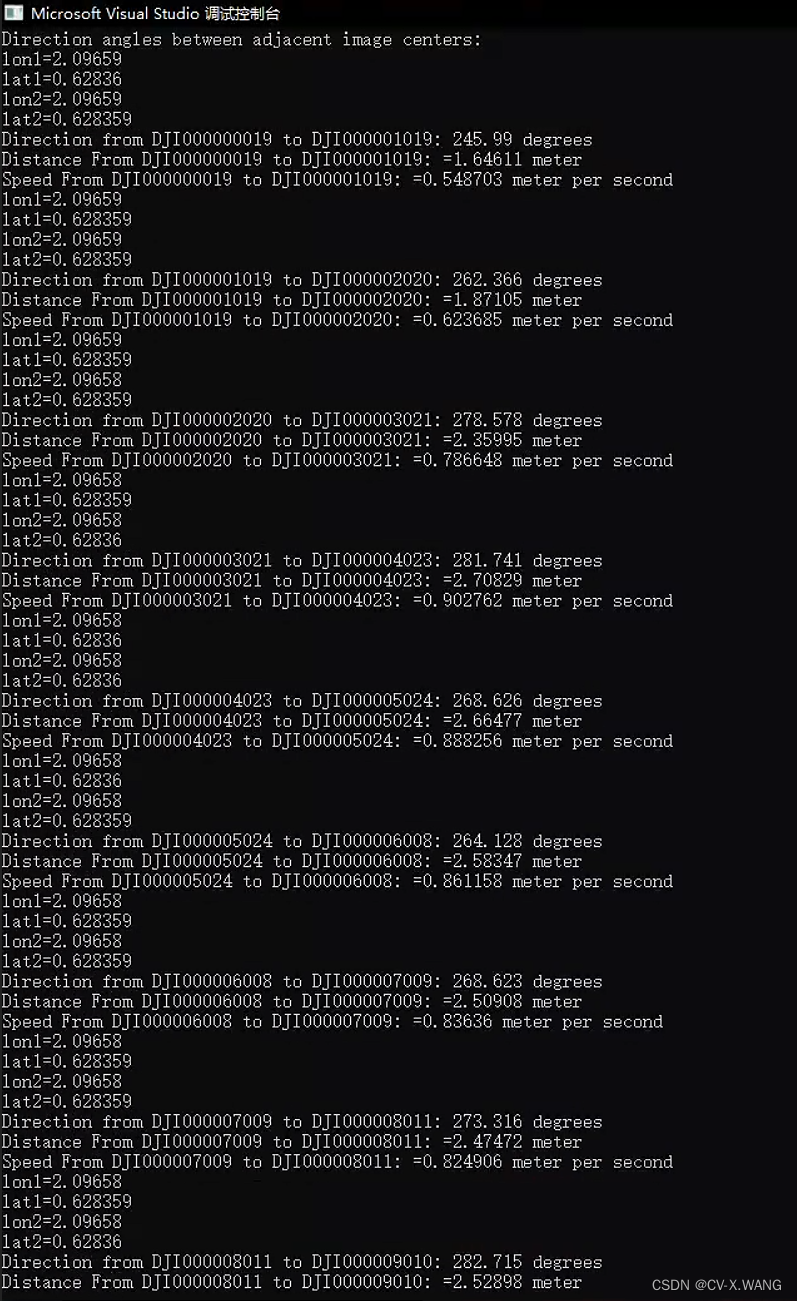
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
Attention : La formule de calcul de la distance que nous obtenons ici est la suivante :

Ceci n'est que la démonstration la plus simple. Dans des situations réelles, nous devons prendre en compte une série de conditions telles que le système de coordonnées, l'emplacement de la zone de mesure, etc., pour obtenir une distance plus précise.
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- #include <iostream>
- #include <fstream>
- #include <sstream>
- #include <vector>
- #include <cmath>
-
- using namespace std;
- #define M_PI 3.14159265358979323846 // pi
- // Function to split a string by a delimiter
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
-
- // direction angle in degrees
- //原理是 在平面上以正北方向为0°方向,顺时针为0-360°
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- int main() {
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
-
- // Calculate direction angles between adjacent image centers
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
-
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- //cin.get();
-
- return 0;
- }

Il se consacre à la recherche technologique depuis plus de trente ans, maîtrise divers langages tels que java, linux, javascript, php, css, etc., et a apporté de nombreuses contributions dans le domaine de l'open source. une station de documentation pour les développeurs pour partager certains problèmes de développement technologique pour référence future.
