informasi kontak saya
Surat[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Daftar isi
3. Menentukan fungsi perhitungan arah
4. Ekstrak informasi yang diperlukan dari file txt
5. Hitung perubahan arah sudut target antar foto yang berdekatan
6. Hitung jarak gerak dan kecepatan target antar foto yang berdekatan
- //字符串分割
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
#define M_PI 3.14159265358979323846 // piUntuk mendapatkan arah pergerakan sasaran searah bidang, artikel ini mengadopsi metode arah 360° yang umum digunakan di bidang militer. Artinya, arah utara sebenarnya adalah arah 0°, dan arah searah jarum jam adalah 0-360°. Misalnya, arah timur sebenarnya: dalam sistem arah kita, arahnya adalah 90°.
beberapa,
ganda lon1_rad = lon1 * M_PI / 180.0;
ganda lat1_rad = lat1 * M_PI / 180.0;
ganda lon2_rad = lon2 * M_PI / 180.0;
ganda lat2_rad = lat2 * M_PI / 180.0;
Itu dalam radian.
- //方向函数
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
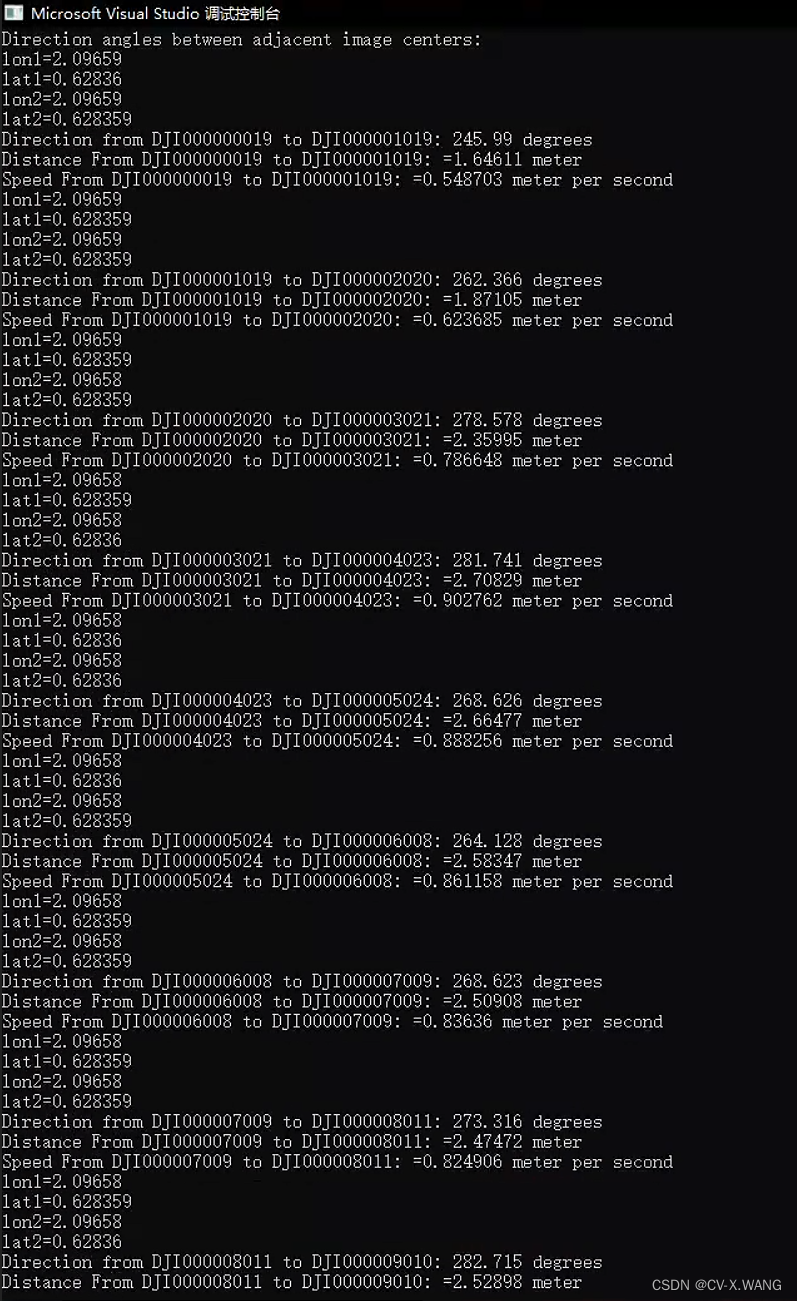
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
Mohon diperhatikan: Rumus perhitungan jarak yang kita peroleh disini adalah:

Ini hanyalah demonstrasi paling sederhana. Dalam situasi sebenarnya, kita perlu mempertimbangkan serangkaian kondisi seperti sistem koordinat, lokasi area pengukuran, dll., untuk mendapatkan Jarak yang lebih akurat.
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- #include <iostream>
- #include <fstream>
- #include <sstream>
- #include <vector>
- #include <cmath>
-
- using namespace std;
- #define M_PI 3.14159265358979323846 // pi
- // Function to split a string by a delimiter
- vector<string> split(const string &s, char delimiter) {
- vector<string> tokens;
- string token;
- istringstream tokenStream(s);
- while (getline(tokenStream, token, delimiter)) {
- tokens.push_back(token);
- }
- return tokens;
- }
-
- // direction angle in degrees
- //原理是 在平面上以正北方向为0°方向,顺时针为0-360°
- double calculateDirectionAngle(double lon1, double lat1, double lon2, double lat2) {
- // Convert degrees to radians
- double lon1_rad = lon1 * M_PI / 180.0;
- double lat1_rad = lat1 * M_PI / 180.0;
- double lon2_rad = lon2 * M_PI / 180.0;
- double lat2_rad = lat2 * M_PI / 180.0;
-
- // Calculate delta longitude and convert to radians
- double delta_lon_rad = (lon2 - lon1) * M_PI / 180.0;
-
- // Calculate y and x components
- double y = sin(delta_lon_rad) * cos(lat2_rad);
- double x = cos(lat1_rad) * sin(lat2_rad) - sin(lat1_rad) * cos(lat2_rad) * cos(delta_lon_rad);
-
- // Calculate direction angle in radians
- double direction_rad = atan2(y, x);
-
- // Convert direction angle to degrees
- double direction_deg = direction_rad * 180.0 / M_PI;
-
- // Ensure direction angle is within [0, 360) degrees
- if (direction_deg < 0) {
- direction_deg += 360.0;
- }
-
- return direction_deg;
- }
-
- int main() {
- ifstream file("LBH.txt");
- if (!file.is_open()) {
- cerr << "Could not open the file!" << endl;
- return 1;
- }
-
- string line;
- // Skip the header line
- getline(file, line);
-
- vector<vector<string>> extractedData;
-
- // Read each line from the file
- while (getline(file, line)) {
- vector<string> columns = split(line, 't');
- if (columns.size() < 16) {
- cerr << "Invalid line format" << endl;
- continue;
- }
-
- // Extract the required columns: 0, 13, 14, 15
- vector<string> extractedColumns;
- extractedColumns.push_back(columns[0]); // Image Name
- extractedColumns.push_back(columns[13]); // Longitude
- extractedColumns.push_back(columns[14]); // Latitude
- extractedColumns.push_back(columns[15]); // Altitude
-
- extractedData.push_back(extractedColumns);
- }
-
- file.close();
-
- // Calculate direction angles between adjacent image centers
- cout << "Direction angles between adjacent image centers:" << endl;
- for (size_t i = 1; i < extractedData.size(); ++i) {
- //三角函数计算用弧度制
- double lon1 = (stod(extractedData[i - 1][1]))* M_PI/180; // Longitude
- double lat1 = (stod(extractedData[i - 1][2]))* M_PI / 180; // Latitude
- double lon2 = (stod(extractedData[i][1]))* M_PI / 180; // Longitude
- double lat2 = (stod(extractedData[i][2]))* M_PI / 180; // Latitude
- //计算方向变化角也要用弧度制
- double direction_angle = calculateDirectionAngle(lon1, lat1, lon2, lat2);
- cout << "lon1=" << lon1 << endl << "lat1=" << lat1 << endl << "lon2=" << lon2 << endl << "lat2=" << lat2 << endl;
- // Output Direction
- cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << direction_angle << " degrees" << endl;
-
- double lon2_1 = lon2 - lon1;
- double lat2_1 = lat2 - lat1;
- double lon_ = lon2_1 / 2;//1/2的Δlon
- double lat_ = lat2_1 / 2; //1 / 2的Δlat
- double sin2lon_ = sin(lon_)*sin(lon_);//sin²(1/2Δlon)
- double sin2lat_ = sin(lat_)*sin(lat_); //sin²(1 / 2Δlat)
- double cos_lat1 = cos(lat1);
- double cos_lat2 = cos(lat2);
- double sqrtA = sqrt(sin2lat_+ cos_lat1* cos_lat2*sin2lon_);
- //cout << "Direction from " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "sqrtA =" << sqrtA << endl;
- double asinA = asin(sqrtA);
- //长半轴 短半轴 单位是m
- int a_r = 6378137.0;
- int b_r = 6356752;
- double Earth_R = (2 * a_r + b_r) / 3;
- double Distance = 2 * Earth_R*asinA;
- cout << "Distance From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << Distance <<" meter"<< endl;
- int time = 3;//拍照间隔 s
- double speed = Distance / time;
- cout << "Speed From " << extractedData[i - 1][0] << " to " << extractedData[i][0] << ": " << "=" << speed << " meter per second" << endl;
- }
- //cin.get();
-
- return 0;
- }

Ia telah mengabdikan dirinya untuk meneliti teknologi selama lebih dari 30 tahun, dan mahir dalam berbagai bahasa seperti java, linux, javascript, php, css, dll. Ia telah memberikan banyak kontribusi di bidang open source stasiun dokumentasi pengembang untuk berbagi beberapa masalah dalam pengembangan teknologi untuk referensi di masa mendatang. Semua orang memeriksanya

Surat[email protected]