2024-07-11
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Edellinen jakso , SVPWM:n johdosta olemme saaneet kyvyn hallita mitä tahansa moottorin roottoriin kohdistuvaa voimaa. Tässä osiossa valitsemme edellisessä osiossa saadun roottorin dq-akselin irrotuksen SVPWM-muodon roottorin voiman kohtuullisen hallitsemiseksi ja FOC-moottorin ohjauksen perimmäisen tavoitteen saavuttamiseksi: sijainnin, nopeuden ja virran ohjauksen.
Ihmiset, jotka lukevat tämän osan, ymmärtävät todennäköisesti PID-säädön (Proportional ratio, Integral Integral, Derivative differential) -ohjauksen, jota myös minun kykyni rajoittaa. En anna tässä täydellistä selitystä, enkä myöskään sisällä edistyneitä ohjausmenetelmiä.
Olipa kyseessä moottorin asento, nopeus tai virta, niitä kaikkia voidaan pitää ohjatuina parametreina.
Intuitiivisesti katsottuna, kun ohjatun parametrin reaaliaikainen arvo on pienempi kuin tavoitearvo, on käytettävä ulkoista voimaa ohjatun parametrin lisäämiseksi. Jos ulkoinen voima on liian suuri, ohjattu parametri ylittyy, jolloin ohjatun parametrin värähtelyamplitudi lähellä tavoitearvoa kasvaa ja suuremmaksi, jos ulkoinen voima on liian pieni, parametri saavuttaa tavoitearvon liian hitaasti. Siksi on tarpeen hankkia sopiva ulkoinen voima, jotta säädetyt parametrit eivät värähtele yhä voimakkaammin ja säätönopeus ei ole liian hidas. Tästä intuitiivisesta ohjausideasta on peräisin PID:ssä oleva P. Kun käytät yksinkertaisesti P-ohjausta, aseta ulkoisen voiman koko = ero ohjatun parametrin ja tavoitearvon * P-kertoimen välillä. On hyvin intuitiivista sanoa, että mitä suurempi ero on, sitä suurempi on ulkoinen voima. Jos P-kerroin on asetettu suhteellisen pieneksi, vaikka ohjattu parametri ei värähtele koko ajan ja voi hitaasti stabiloitua tavoitearvoon, säätönopeus on liian hidas. Tällä hetkellä PID:n D-säätö voidaan lisätä ohjattu parametri värähtelee alun perin nopeasti tavoitearvoon.
Ajatellaanpa D-ohjausta intuitiivisesta näkökulmasta Kun ohjattu parametri lähestyy tai ohittaa tavoitearvon puhtaan P-säädön alaisena, nopeuden vastakkaiseen suuntaan kohdistuva korjausvoima auttaa ohjattua parametria jarruttamaan lähellä tavoitearvoa, jolloin ohjattu parametri pääsee jarruttamaan. Kutista tavoitearvoon nopeammin. Tämä nopeuden vastakkainen korjausvoima on D-säätö. D-ohjauksen lisäämisen jälkeen ohjauksen ulkoisen voiman koko = ohjatun parametrin ja tavoitearvon välinen ero * P-kerroin ohjatun parametrin nopeus * D-kerroin. Käytettäessä puhdasta D-ohjausta, koska ohjatun parametrin nopeus on 0 lähtötilassa, ohjattu parametri ei saa ulkoista voimaa. Voidaan myös nähdä, että P-säätö tuottaa ulkoista voimaa ja D-säätö rajoittaa ulkoista voimaa. Jos D-kerroin valitaan liian suureksi, pieni nopeus voi aiheuttaa valtavan ulkoisen voiman, jos D-kerroin valitaan liian pieneksi, se ei riitä rajoittamaan P-ohjaustuotannon ulkoista voimaa, ja säädetyt parametrit ovat hitaita; vakauttaa.
Ajatellaanpa I-ohjausta intuitiivisesta perspektiivistä säädettävä parametri ja tavoitearvo ajan kuluessa, voidaan saada teho, joka tarvitaan ohjatun parametrin saavuttamiseen tavoitearvon ollessa kuormitettu. Tätä mekanismia hallitsen minä. Kun on lisätty I-säädin, ohjauksen ulkoisen voiman koko = säädetyn parametrin ja tavoitearvon välinen ero * P-kerroin, säädettävän parametrin nopeus * D-kerroin, säädetyn parametrin ja tavoitearvon välinen ero kertyy ajan myötä * I kerroin.
Kun moottoria ohjataan, ilman erityisiä olosuhteita, koska d-akseli ei vaikuta moottorin pyörimiseen, pid-säätö voi ohjata vain q-akselin voimaa ja d-akselia voidaan ohjata tai lähtöä voidaan ohjata. asetetaan suoraan arvoon 0.
Näytteenoton tarkkuuden ja taajuuden rajoittamassa nopeuden ja virran ohjauksessa nopeus ja virta ovat epävakaita ja muuttuvat nopeasti. Esimerkiksi seuraava kuva on suoraan laskettu moottorin nopeuden arvo Jos tällaista arvoa käytetään suoraan, PID-lähtö vaihtelee suuresti.

Alla olevasta kuvasta näkyy, että suodatuksen jälkeen se on lähempänä todellista arvoa: Suodatusmenetelmiä on monia, kuten alipäästösuodatus ja Kalman-suodatus. Olennaista on estimoida arvo, joka on lähellä todellista arvoa kohinaan sekoitetussa datassa. Koska suodatus on erittäin laaja aihe, periaatetta ei selitetä tässä osiossa. Voit tarkastella koodia suoraan seuraavassa käytännön osassa. Muistutamme vain, että suodatuslaskelmat on suoritettava ennen PID-säätimen syöttämistä.
Suodatusmenetelmiä on monia, kuten alipäästösuodatus ja Kalman-suodatus. Olennaista on estimoida arvo, joka on lähellä todellista arvoa kohinaan sekoitetussa datassa. Koska suodatus on erittäin laaja aihe, periaatetta ei selitetä tässä osiossa. Voit tarkastella koodia suoraan seuraavassa käytännön osassa. Muistutamme vain, että suodatuslaskelmat on suoritettava ennen PID-säätimen syöttämistä.
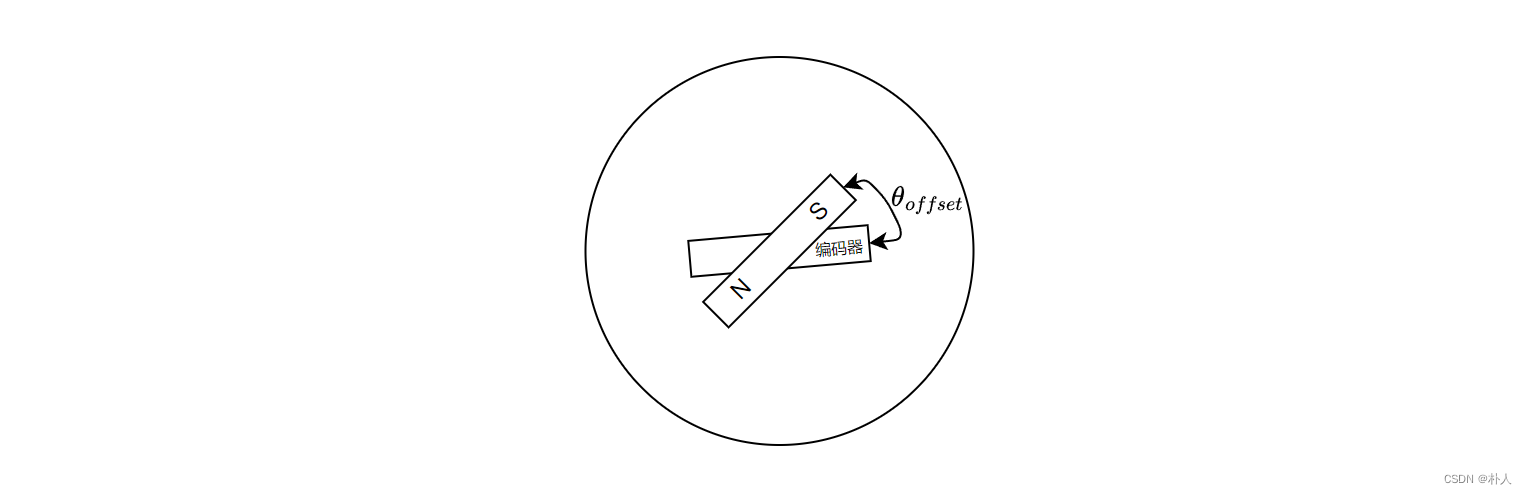
Asento viittaa kulmaan. On huomattava, että on olemassa kaksi fyysistä kulmaa, toinen on moottorin kulma ja toinen on roottorin kulma. Moottorianturi on asennettu roottorikoteloon, joten anturi saa roottorikotelon kulman ja roottori sijaitsee sisällä Koska roottorikotelo ja roottori ovat kiinnitettyinä, näiden kahden kulman välillä on kiinteä siirtymä Asennettaessa anturi Laitteen nolla-aste ei voi olla tarkasti roottorin kestomagneettia päin. Anturin kulman antaa anturi, ja roottorin kulma voidaan myös tietää. Tämän kiinteän offsetin saaminen selitetään seuraavassa käytännön osassa. Tässä osiossa sinun tarvitsee suorittaa vain teoreettinen laskentaosa. Tuloksena oleva magneettivektori vaikuttaa roottorin kestomagneettiin, joten teoreettinen laskenta perustuu roottorin kulmaan.
Roottorin asennon ohjaamiseen on kaksi tapaa:
pid-menetelmä:
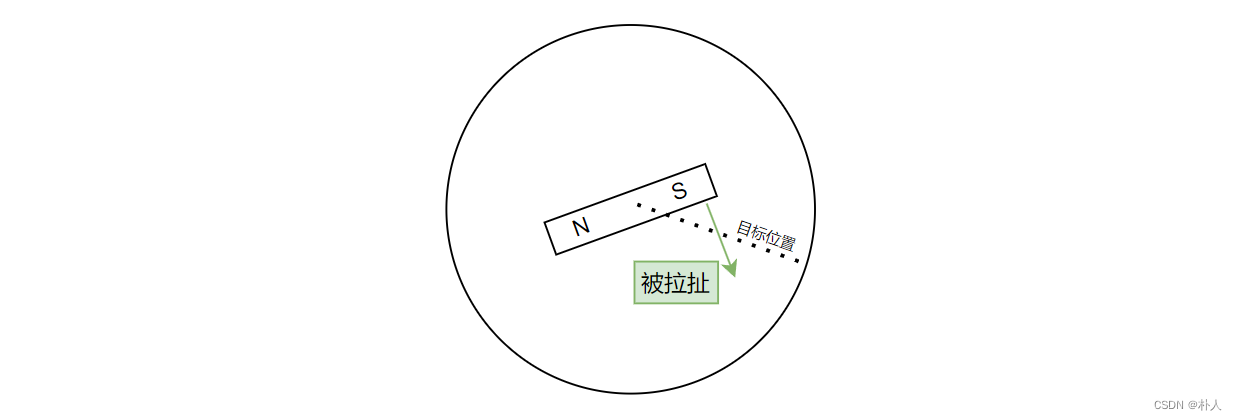
Intuitiivinen idea on käyttää roottorin q-akselia vetääksesi roottoria jatkuvasti vasemmalle ja oikealle vetovoima, ja roottori palaa kohdeasentoon.
Edut: q-akseli voi tarjota suuremman voiman, ja asennon ohjaus on nopeampi ja tehokkaampi.
Haitat: Koska q-akseli on 90 astetta erilainen kuin roottorin kestomagneetin magneettivektori, roottorin reaaliaikainen sijainti (kulma) on tiedettävä.
Koska roottorin reaaliaikainen sijainti on helppo saada enkooderilla, asentoa ohjataan useimmissa tapauksissa pid:llä.
Erillisen sijainnin FOC-ohjauslohkokaavio on kuten alla. Kuva tarkoittaa kohdeaseman syöttämistä, eron laskemista kooderin laskeman kulman kanssa ja sitten pid-säätimen syöttämistä ohjaamaan vain roottorin q-akselin intensiteettiä, d-akselin intensiteetti asetetaan suoraan arvoon 0, ja lopuksi dq-akselin intensiteetti (0 ~ 1) syötetään aiemmin johdettuun SVPWM-funktioon ja lähtö on uvw-siltavarren pwm-käyttöjakso.Tässä on huomioitava syöttökohteen sijainti θ theta_{in}θsisäänSe voi olla roottorin kulma tai enkooderin kulma tai monikäännöskulma, kunhan se liittyy palautteeseen θ thetaθPidä vain sama kulma.

D-akselin pakotettu veto:
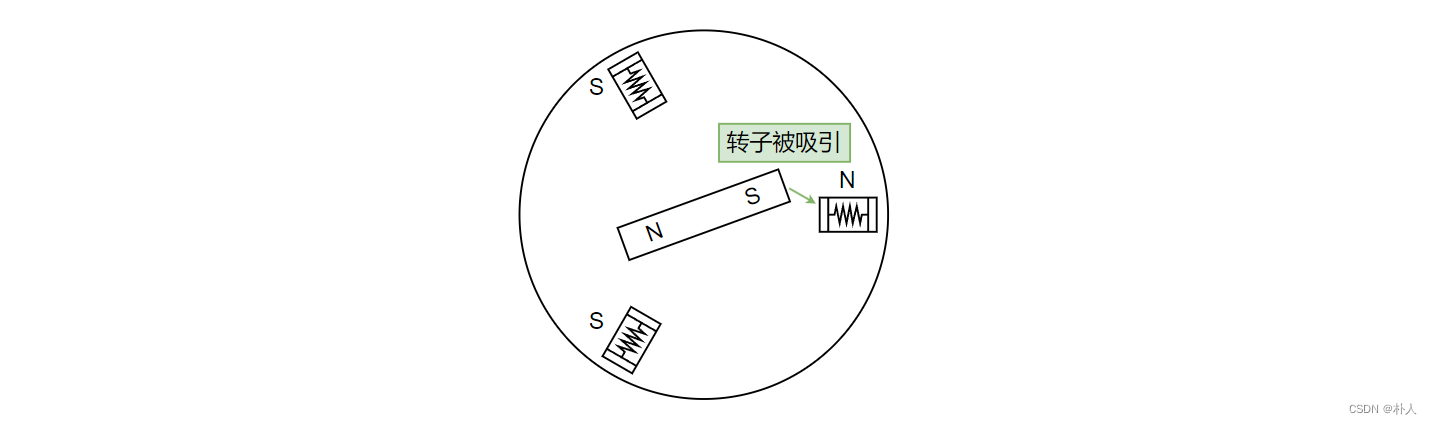
Ydinideana on ohjata käämiä keinotekoisesti kohdekelan magneettivektorin luomiseksi, jolloin kestomagneetin d-akseli vetää kohdepaikkaan. Huomaa, että tämä menetelmä houkuttelee d-akselia kohdeasentoon.
Edut: Koska tavoiteasento syntyy, roottorin kulmaa ei tarvitse tietää, vaan roottori vetää luonnollisesti puoleensa.
Haitat: Tangentiaalinen voimakomponentti on pieni, ja pieni tangentiaalinen ulkoinen voima voi aiheuttaa roottorin ilmeisen siirtymisen pois paikaltaan.
Ei ole tarkoituksenmukaista käyttää d-akselin vetomenetelmää nopeuden säätöön, koska d-akselin vastuksen tarkoitus ei ole kooderin käyttö Ilman enkooderin tietoja on vaikea laskea nopeutta. Nopeussäätö voi käyttää pid-säätömenetelmää, mutta koska nopeusarvo muuttuu suhteellisen epävakaasti moottorin pyörimisen aikana ja D-säätö on verrannollinen ohjatun parametrin muutokseen, joten yleensä käytetään vain PI-säätöä.
Nopeuden laskentatapa on hyvin yksinkertainen Nykyinen kulma − Viimeisin tallennettu kulma Δ t frac{Nykyinen kulma - Viimeisin tallennettu kulma}{Delta{t}}Δtnykyinen kulma−Viimeisin tallennettu kulma。
Nopeudensäätö voidaan saavuttaa syöttämällä tavoitenopeuden ja reaaliaikaisen nopeuden välinen ero PI-ohjaukseen.
Yksittäisen nopeuden FOC-ohjauslohkokaavio on kuten alla.

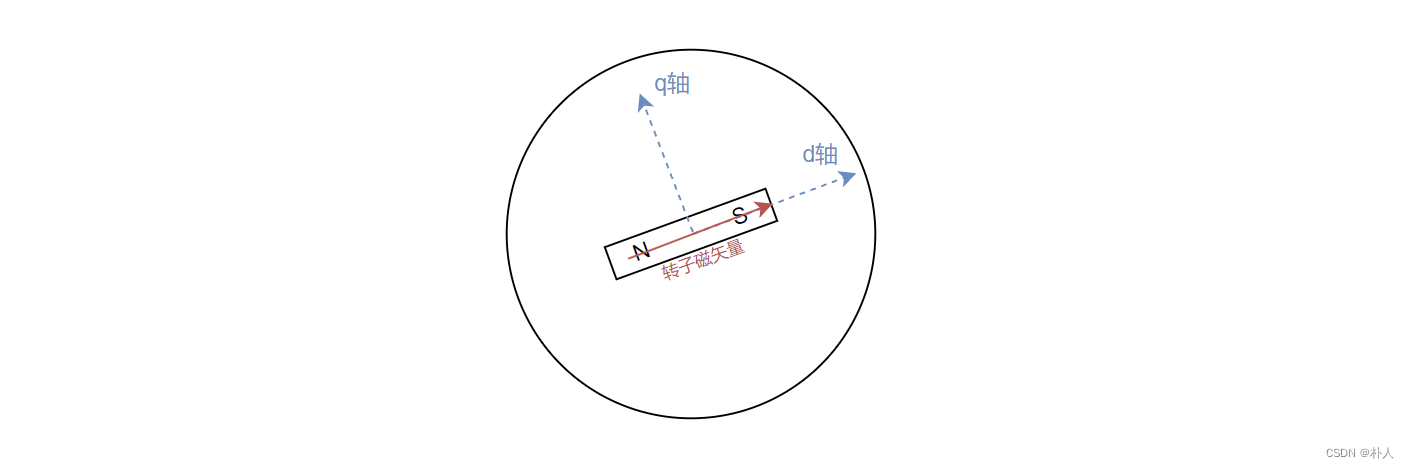
Moottorin virta edustaa vääntömomenttia. Kun roottorin voima on irrotettu dq-akselista, voidaan havaita, että vain q-akseli vaikuttaa moottorin pyörimiseen ja vain q-akseli tuottaa vääntömomentin. Siksi vain q-akselin virtaa on ohjattava ohjata moottorin vääntömomenttia. Jos myös d-akselin virtaa ohjataan, moottorin virran käyttöastetta voidaan parantaa, lämmöntuotantoa voidaan vähentää ja moottorin maksimivääntömomenttia voidaan lisätä.
Ota moottorin virta:
Roottorin dq-akseli on abstrakti käsite, jota käytetään helpottamaan roottorin voiman irrottamista. Virta, joka voidaan havaita suoraan, on moottorin vaihelinjan virta virta voidaan laskea vaihelinjan virran perusteella.
Vaihelinjavirran havaitsemiseen on monia tapoja Kaksi yleisintä menetelmää ovat: 1. Virrantunnistus sijoitetaan ylemmän ja alemman siltavarren tehoputkien väliin, jota kutsutaan online-ilmaisuksi. 2. Virrantunnistus sijoitetaan alavarren ja GND:n väliin, jota kutsutaan matalan puolen tunnistukseksi.
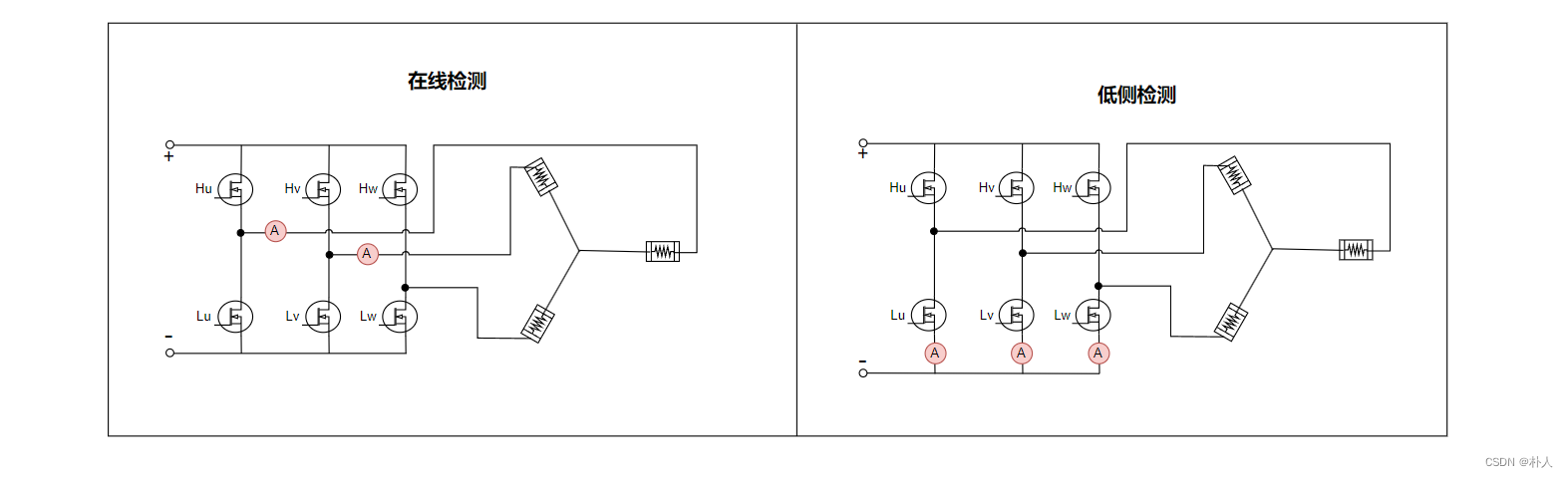
solmun takia流出电流 流入电流=0 , joten kolmeen vaihejohtoon tarvitaan vain kaksi virrantunnistusyksikköä. Alapuolen havainnointiin on kuitenkin parasta käyttää kolmea virrantunnistusyksikköä, koska kun tietyn siltavarren pwm-käyttösuhde on 1 tai lähellä 1:tä, alemman siltavarren läpi ei kulje virtaa tai virta tulee olla epävakaa, ja vain kolme vaihejohtoa. Jäljellä oleva virrantunnistusyksikkö voi kerätä virtaa normaalisti sykli, ja toinen lasketaan olettamalla, että virtojen summa on 0. Online-tunnistuksessa tätä ongelmaa ei ole, koska riippumatta siitä, onko alempi siltavarsi kiinni vai ei, vaihejohdon läpi kulkee aina virtaa. Koska jännite online-ilmaisuasemassa on suhteellisen suuri, online-ilmaisun virranilmaisuyksikön on kestettävä suuri jännite ja se on suhteellisen kallis.
Kun olet saanut kolme vaihejohtovirtaa, etsi seuraavaksi tapa muuntaa ne dq-akselivirroiksi.Vaihelinjan virta voidaan projisoida dq-akselille, jolloin dq-akselin virta voidaan saada suoraan. Nykyinen päävirtamenetelmä on kuitenkin ensin heijastaa dq-akseli α alfaαAkseli ja β betaβakseli (tätä vaihetta kutsutaan Clark-muunnokseksi) ja sitten α alfaαAkseli ja β betaβAkselivirta projisoidaan dq-akselille (tätä vaihetta kutsutaan parkkimuunnokseksi), koska sitä käytetään edistyneemmässä asemaanturittomassa FOC:ssa α alfaαAkseli ja β betaβakselin virta.
Clarkin muunnos:
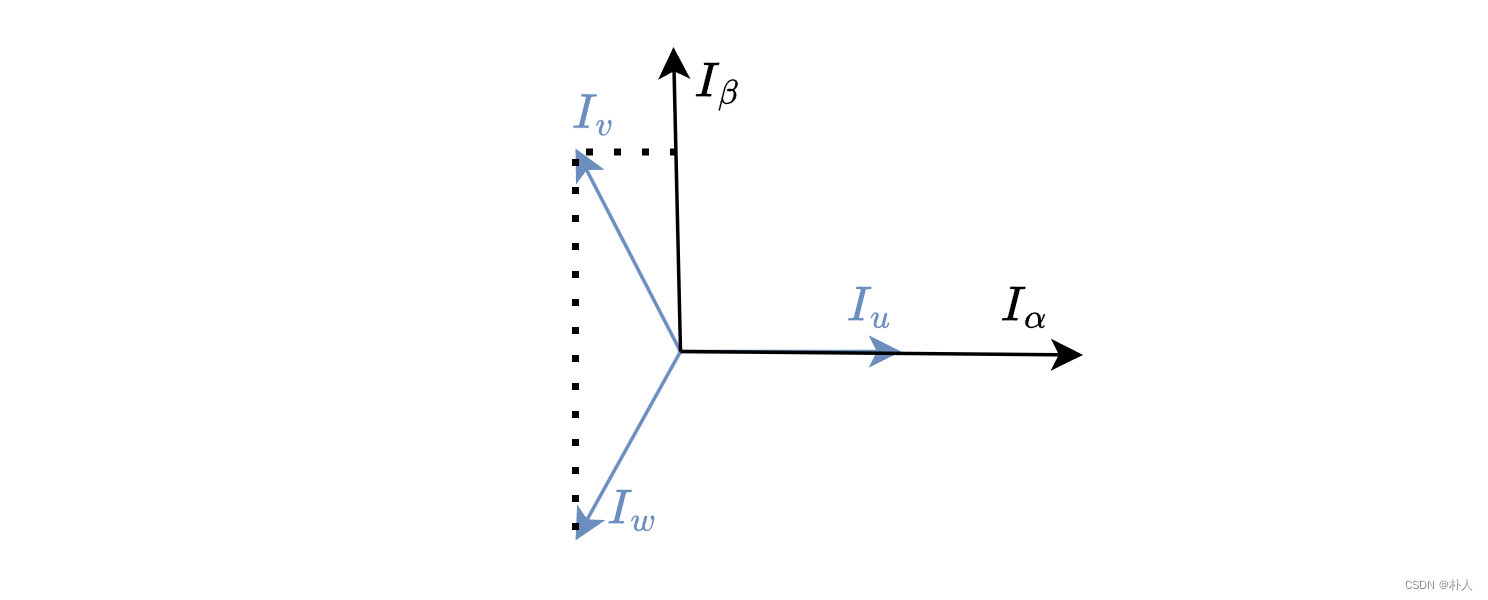
Kolmivaiheinen virta I u , I v , I w I_u, I_v, I_wminäu,minäv,minäwProjekti kohteeseen I α , I β I_alfa, I_betaminäα,minäβKuten alla olevan kuvan geometrisesta suhteesta voidaan nähdä, projektiolauseke on:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 °{minäα=minäu−minäv∗cos60tutkinnon−minäw∗cos60tutkinnonminäβ=minäv∗cos30tutkinnon−minäw∗cos30tutkinnon
{minäα=minäu−minäv∗cos60°−minäw∗cos60°minäβ=minäv∗cos30°−minäw∗cos30°
puiston muutos:
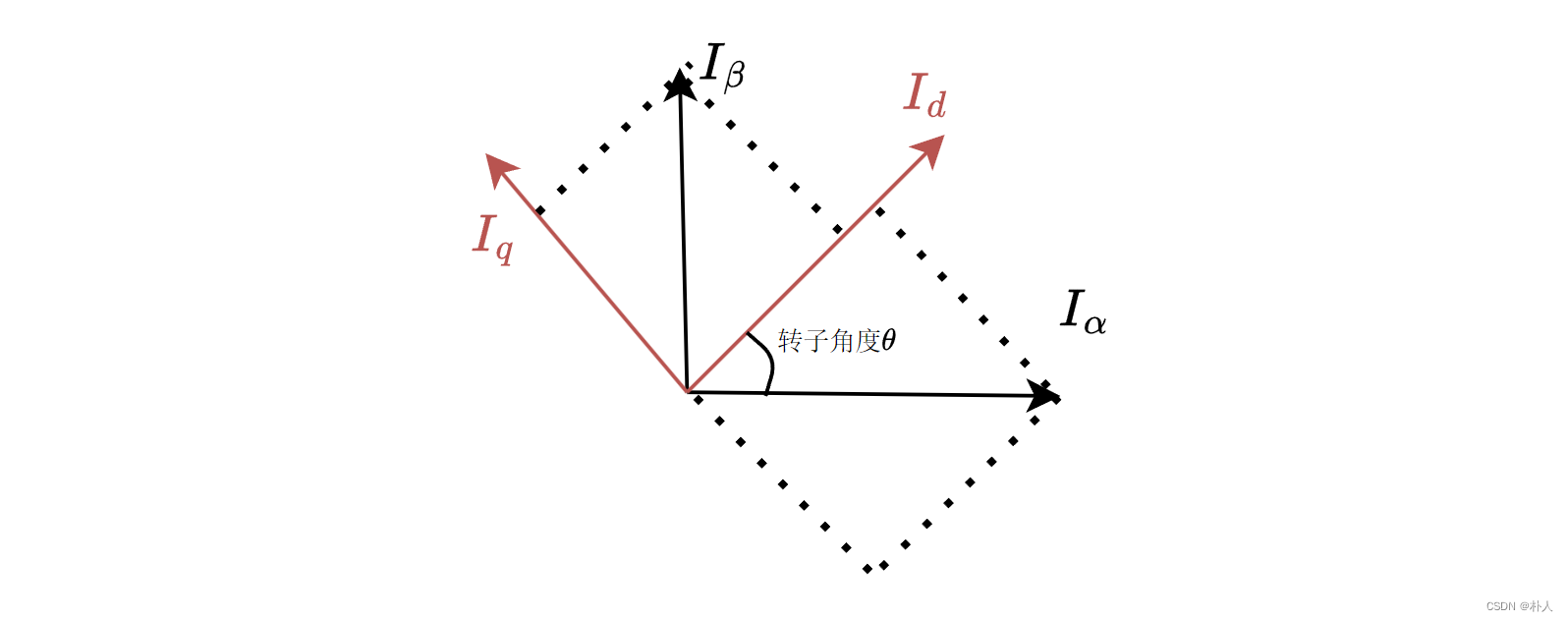
Tahtoa I α , I β I_alfa, I_betaminäα,minäβAkseli projisoidaan dq-akselille (todellisuudessa kerrottuna rotaatiomatriisilla, kuten alla olevan kuvan geometrisesta suhteesta voidaan nähdä, projektiolauseke on:
{ I d = I α ∗ cos θ I β ∗ sin θ I q = − I α ∗ sin θ I β ∗ cos θ{minäd=minäα∗cosθ minäβ∗syntiθminäq=−minäα∗syntiθ minäβ∗cosθ
{minäd=minäα∗cosθ minäβ∗syntiθminäq=−minäα∗syntiθ minäβ∗cosθ
Yksittäisen virran FOC-säätökaavio on alla esitetty. Koska virran muutos on suhteellisen epävakaa, tässä ei yleensä käytetä ohjatun parametrin muutosnopeuteen liittyvää D-säätöä, vaan käytetään vain PI-säätöä.

Jos on tällainen vaatimus: määritä asentoa ohjattaessa suurin nopeus ja maksimivirta, kun moottori palaa asentoon, tai kun säädät nopeutta, määritä suurin virta, kun moottori saavuttaa tavoitenopeuden, sinun on käytettävä paikka-nopeus-virta-merkkijonon tason säädin. Kaskadiohjaus ei ohjaa moottoria saavuttamaan tiettyä virta- tai nopeusarvoa, vaan vaatii moottorin saavuttamaan maksimivirran tai maksiminopeusarvon ohjausprosessin aikana, koska moottoria on mahdotonta pitää yhdessä asennossa. On nopeutta tai virtaa.
Kaskadiohjaus tarkoittaa, että nykyisen säätösilmukan tulo on edellisen ohjaussilmukan lähtö Esimerkkinä kaskadiasennon ohjaus, ohjauslohkokaavio on:

Teoreettinen osa on nyt ohi Olemme saaneet SVPWM:n laskentamenetelmän sekä paikan, nopeuden ja virran ohjausprosessin. Käytämme kuitenkin erilaisia ongelmia, kuten vaihejonojen ja Verrattuna toteutustapaan, nykyiseen näytteenottoaikaan, oheislaitteiden kokoonpanoon jne., seuraavassa käytännön osassa käytetään erittäin yleisiä yksisiruisia kustannustehokkaita työkaluja: smt32f103c8t6 ja stm32cube ilman moottorikirjastoa. FOC-ohjaus tyhjästä.

Hän on omistautunut teknologian tutkimukselle yli 30 vuoden ajan ja hallitsee useita kieliä, kuten java, linux, javascript, php, css jne. Hän on tehnyt paljon työtä avoimen lähdekoodin tässä Kehittäjän dokumentaatioasema jakaaksesi teknologian kehityksen ongelman tulevaa käyttöä varten
