τα στοιχεία επικοινωνίας μου
Ταχυδρομείο[email protected]
2024-07-11
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Προηγούμενη ενότητα , μέσω της εξαγωγής του SVPWM, έχουμε αποκτήσει τη δυνατότητα να ελέγχουμε οποιαδήποτε δύναμη στον ρότορα του κινητήρα. Σε αυτήν την ενότητα, επιλέγουμε τη μορφή SVPWM της αποσύνδεσης του άξονα dq του ρότορα που ελήφθη στην προηγούμενη ενότητα για να ελέγξουμε εύλογα τη δύναμη του ρότορα και να επιτύχουμε τον τελικό στόχο του ελέγχου κινητήρα FOC: θέση, ταχύτητα και έλεγχος ρεύματος.
Τα άτομα που διαβάζουν αυτήν την ενότητα πιθανότατα κατανοούν τον έλεγχο PID (Αναλογική αναλογία, Ολοκληρωμένο ολοκλήρωμα, Παράγωγο διαφορικό), ο οποίος επίσης περιορίζεται από την ικανότητά μου. Δεν θα δώσω μια πλήρη εξήγηση εδώ, ούτε θα περιλαμβάνει προηγμένες μεθόδους ελέγχου.
Είτε πρόκειται για τη θέση, την ταχύτητα ή το ρεύμα του κινητήρα, όλα μπορούν να θεωρηθούν ως ελεγχόμενες παράμετροι.
Από μια διαισθητική προοπτική, όταν η τιμή σε πραγματικό χρόνο μιας ελεγχόμενης παραμέτρου είναι μικρότερη από την τιμή στόχο, πρέπει να εφαρμοστεί εξωτερική δύναμη για να αυξηθεί η ελεγχόμενη παράμετρος. Εάν η εξωτερική δύναμη που εφαρμόζεται είναι πολύ μεγάλη, η ελεγχόμενη παράμετρος θα υπερβεί, με αποτέλεσμα το πλάτος ταλάντωσης της ελεγχόμενης παραμέτρου κοντά στην τιμή στόχου να γίνεται όλο και μεγαλύτερο εάν η εξωτερική δύναμη που εφαρμόζεται είναι πολύ μικρή, η παράμετρος θα φτάσει την τιμή στόχο πολύ αργά. Επομένως, είναι απαραίτητο να αποκτήσετε μια κατάλληλη εξωτερική δύναμη, έτσι ώστε οι ελεγχόμενες παράμετροι να μην ταλαντώνονται όλο και πιο βίαια και η ταχύτητα ρύθμισης να μην είναι πολύ αργή. Από αυτή τη διαισθητική ιδέα ελέγχου είναι το P στο PID. Όταν χρησιμοποιείτε απλώς τον έλεγχο P, ορίστε το μέγεθος εξωτερικής δύναμης = τη διαφορά μεταξύ της ελεγχόμενης παραμέτρου και της τιμής στόχου * συντελεστής P Είναι πολύ διαισθητικό να πούμε ότι όσο μεγαλύτερη είναι η διαφορά, τόσο μεγαλύτερη είναι η εξωτερική δύναμη που ασκείται. Εάν ο συντελεστής P ρυθμιστεί σχετικά μικρός, αν και η ελεγχόμενη παράμετρος δεν θα ταλαντώνεται συνεχώς και μπορεί να σταθεροποιηθεί αργά στην τιμή στόχο, η ταχύτητα προσαρμογής είναι πολύ αργή αυτήν τη στιγμή, ο έλεγχος D του PID μπορεί να προστεθεί Η ελεγχόμενη παράμετρος αρχικά ταλαντώνεται γρήγορα.
Ας σκεφτούμε τον έλεγχο D από μια διαισθητική προοπτική Όταν η ελεγχόμενη παράμετρος πλησιάζει ή περνά την τιμή στόχου υπό καθαρό έλεγχο P, μια δύναμη διόρθωσης στην αντίθετη κατεύθυνση από την ταχύτητα βοηθά την ελεγχόμενη παράμετρο να φρενάρει κοντά στην τιμή στόχο, επιτρέποντας στην ελεγχόμενη παράμετρο. φρένο. Αυτή η δύναμη διόρθωσης στην αντίθετη κατεύθυνση από την ταχύτητα είναι έλεγχος D. Μετά την προσθήκη του ελέγχου D, το μέγεθος εξωτερικής δύναμης ελέγχου = η διαφορά μεταξύ της ελεγχόμενης παραμέτρου και της τιμής στόχου * Συντελεστής P ελεγχόμενη ταχύτητα παραμέτρου * Συντελεστής D. Όταν χρησιμοποιείτε καθαρό έλεγχο D, καθώς η ταχύτητα της ελεγχόμενης παραμέτρου είναι 0 στην αρχική κατάσταση, η ελεγχόμενη παράμετρος δεν θα λάβει εξωτερική δύναμη. Μπορεί επίσης να φανεί ότι ο έλεγχος P παρέχει εξωτερική δύναμη και ο έλεγχος D περιορίζει την εξωτερική δύναμη. Εάν ο συντελεστής D επιλεγεί πολύ μεγάλος, μια μικρή ταχύτητα μπορεί να προκαλέσει τεράστια εξωτερική δύναμη εάν ο συντελεστής D επιλεγεί πολύ μικρός, δεν θα είναι αρκετός για να περιοριστεί η εξωτερική δύναμη της παραγωγής ελέγχου P και οι ελεγχόμενες παράμετροι θα είναι αργές. σταθεροποιώ.
Ας σκεφτούμε το I control από μια διαισθητική προοπτική Όταν υπάρχει ένα φορτίο στην ελεγχόμενη παράμετρο, η εξωτερική δύναμη που παρέχεται από τον απλό έλεγχο P μπορεί να μην είναι αρκετή για να υποστηρίξει το φορτίο Η ελεγχόμενη παράμετρος και η τιμή στόχου Σωρευμένη με την πάροδο του χρόνου, μπορεί να ληφθεί η ισχύς που απαιτείται για να φτάσει η ελεγχόμενη παράμετρος στην τιμή στόχο όταν υπάρχει φορτίο. Αυτός ο μηχανισμός ελέγχω εγώ. Μετά την προσθήκη ελέγχου I, το μέγεθος εξωτερικής δύναμης ελέγχου = η διαφορά μεταξύ της ελεγχόμενης παραμέτρου και της τιμής στόχου * Συντελεστής P, η ταχύτητα της ελεγχόμενης παραμέτρου * Συντελεστής D, η διαφορά μεταξύ της ελεγχόμενης παραμέτρου και της τιμής στόχου συσσωρεύεται με την πάροδο του χρόνου * I συντελεστής.
Κατά τον έλεγχο του κινητήρα, χωρίς ειδικές συνθήκες, καθώς ο άξονας d δεν συμβάλλει στην περιστροφή του κινητήρα, ο έλεγχος pid μπορεί να ελέγξει μόνο τη δύναμη του άξονα q και ο άξονας d μπορεί να ελεγχθεί ή η έξοδος μπορεί να οριστεί απευθείας στο 0.
Στον έλεγχο ταχύτητας και στον έλεγχο ρεύματος, που περιορίζονται από την ακρίβεια και τη συχνότητα δειγματοληψίας, η ταχύτητα και το ρεύμα είναι ασταθή και αλλάζουν γρήγορα, για παράδειγμα, το παρακάτω σχήμα είναι μια απευθείας υπολογισμένη τιμή της ταχύτητας του κινητήρα Εάν μια τέτοια τιμή χρησιμοποιηθεί απευθείας, θα προκαλέσει μεγάλες διακυμάνσεις στην έξοδο PID.

Η παρακάτω εικόνα δείχνει ότι μετά το φιλτράρισμα, είναι πιο κοντά στην πραγματική τιμή: Υπάρχουν πολλές μέθοδοι φιλτραρίσματος, όπως το χαμηλοπερατό φιλτράρισμα και το φιλτράρισμα Kalman Η ουσία είναι να εκτιμηθεί μια τιμή κοντά στην πραγματική τιμή στα δεδομένα που αναμιγνύονται με θόρυβο. Δεδομένου ότι το φιλτράρισμα είναι ένα πολύ μεγάλο θέμα, η αρχή δεν θα εξηγηθεί σε αυτήν την ενότητα.
Υπάρχουν πολλές μέθοδοι φιλτραρίσματος, όπως το χαμηλοπερατό φιλτράρισμα και το φιλτράρισμα Kalman Η ουσία είναι να εκτιμηθεί μια τιμή κοντά στην πραγματική τιμή στα δεδομένα που αναμιγνύονται με θόρυβο. Δεδομένου ότι το φιλτράρισμα είναι ένα πολύ μεγάλο θέμα, η αρχή δεν θα εξηγηθεί σε αυτήν την ενότητα.
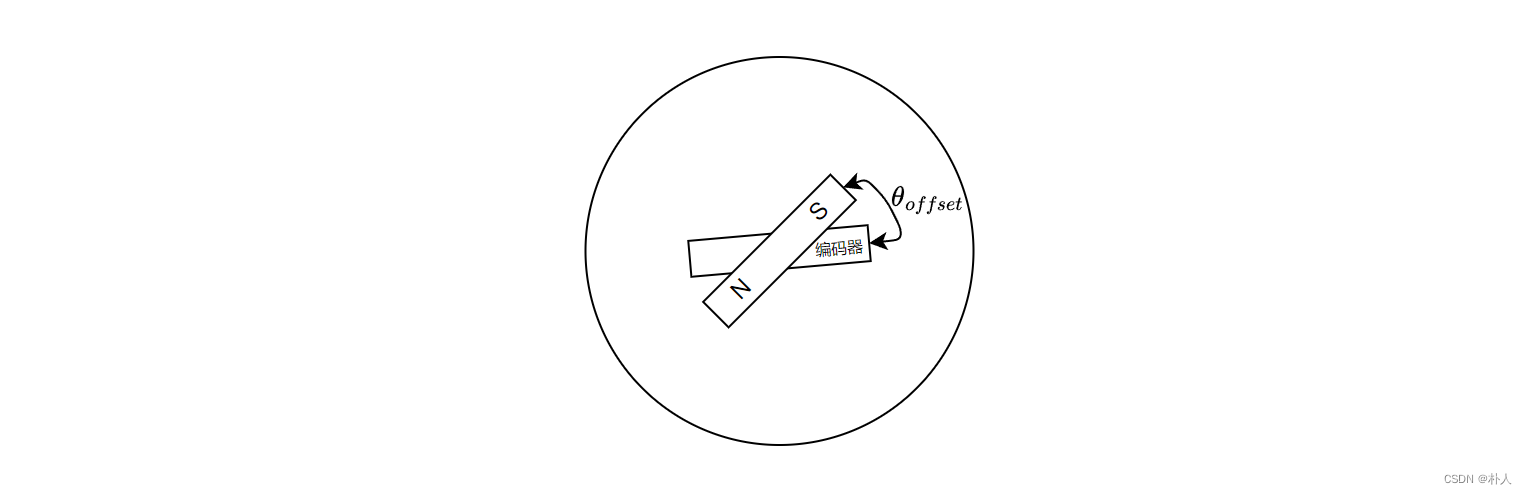
Η θέση αναφέρεται στη γωνία Θα πρέπει να σημειωθεί ότι υπάρχουν δύο φυσικές γωνίες, η μία είναι η γωνία του κινητήρα και η άλλη είναι η γωνία του ρότορα. Ο κωδικοποιητής κινητήρα είναι εγκατεστημένος στο περίβλημα του ρότορα, έτσι ο κωδικοποιητής λαμβάνει τη γωνία του περιβλήματος του ρότορα και ο ρότορας βρίσκεται στο εσωτερικό, καθώς το περίβλημα του ρότορα και ο ρότορας είναι στερεωμένα μεταξύ τους, υπάρχει μια σταθερή μετατόπιση μεταξύ των δύο γωνιών Κατά την εγκατάσταση, ο κωδικοποιητής Ο μηδενικός βαθμός της συσκευής δεν μπορεί να είναι ακριβώς στραμμένος προς τον μόνιμο μαγνήτη του ρότορα. Η γωνία του κωδικοποιητή παρέχεται από τον κωδικοποιητή και η γωνία του ρότορα μπορεί επίσης να είναι γνωστή. Ο τρόπος απόκτησης αυτής της σταθερής μετατόπισης θα εξηγηθεί στο επόμενο πρακτικό μέρος. Το προκύπτον μαγνητικό διάνυσμα δρα στον μόνιμο μαγνήτη του ρότορα, επομένως ο θεωρητικός υπολογισμός βασίζεται στη γωνία του δρομέα.
Υπάρχουν δύο μέθοδοι για να επιτευχθεί έλεγχος θέσης ρότορα:
μέθοδος pid:
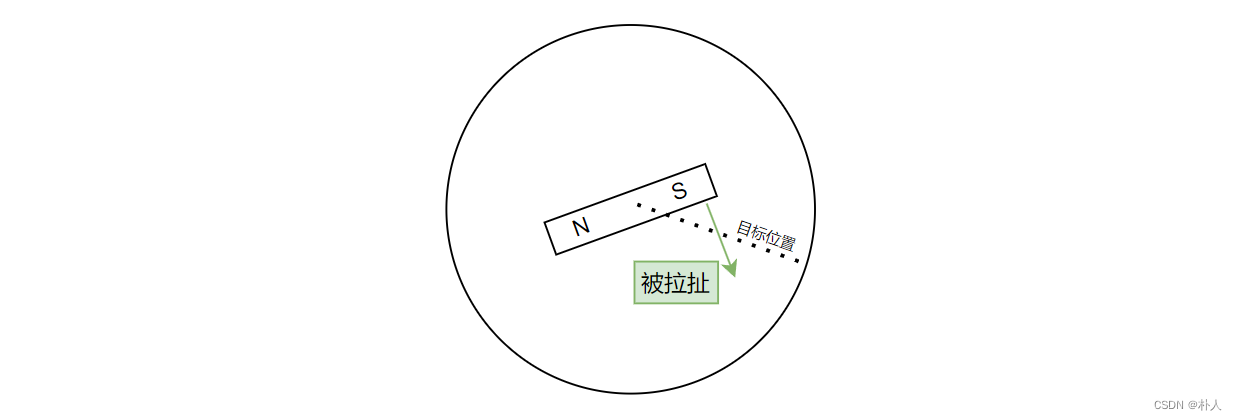
Η διαισθητική ιδέα είναι να χρησιμοποιήσετε τον άξονα q του ρότορα για να τραβήξετε συνεχώς τον ρότορα αριστερά και δεξιά τη δύναμη έλξης και ο ρότορας επιστρέφει στη θέση στόχου.
Πλεονεκτήματα: Ο άξονας q μπορεί να παρέχει μεγαλύτερη δύναμη και ο έλεγχος θέσης είναι ταχύτερος και ισχυρότερος.
Μειονεκτήματα: Δεδομένου ότι ο άξονας q είναι 90 μοίρες διαφορετικός από το μαγνητικό διάνυσμα του μόνιμου μαγνήτη του ρότορα, πρέπει να είναι γνωστή η θέση (γωνία) του ρότορα σε πραγματικό χρόνο.
Δεδομένου ότι η θέση του ρότορα σε πραγματικό χρόνο είναι εύκολο να ληφθεί με έναν κωδικοποιητή, το pid χρησιμοποιείται για τον έλεγχο της θέσης στις περισσότερες περιπτώσεις.
Το διάγραμμα μπλοκ ελέγχου FOC μιας ξεχωριστής θέσης είναι όπως φαίνεται παρακάτω. Αυτό που σημαίνει η εικόνα είναι να εισαγάγετε μια θέση στόχου, να υπολογίσετε τη διαφορά με τη γωνία που υπολογίζεται από τον κωδικοποιητή και, στη συνέχεια, να εισάγετε τον ελεγκτή pid για να ελέγχει μόνο την ένταση του άξονα q του ρότορα, η ένταση του άξονα d ορίζεται απευθείας στο 0, και Τέλος, η ένταση του άξονα dq (0 ~ 1) εισάγεται στη συνάρτηση SVPWM που προέκυψε προηγουμένως και η έξοδος είναι ο κύκλος λειτουργίας pwm του βραχίονα γέφυρας uvw.Αυτό που πρέπει να σημειωθεί εδώ είναι η θέση στόχου εισόδου θ σε θήτα_{σε}θσεΜπορεί να είναι η γωνία του ρότορα ή η γωνία κωδικοποιητή ή η γωνία πολλαπλών στροφών, αρκεί να σχετίζεται με την ανάδραση θ θήταθΑπλώς κρατήστε την ίδια γωνία.

Αναγκαστική έλξη άξονα D:
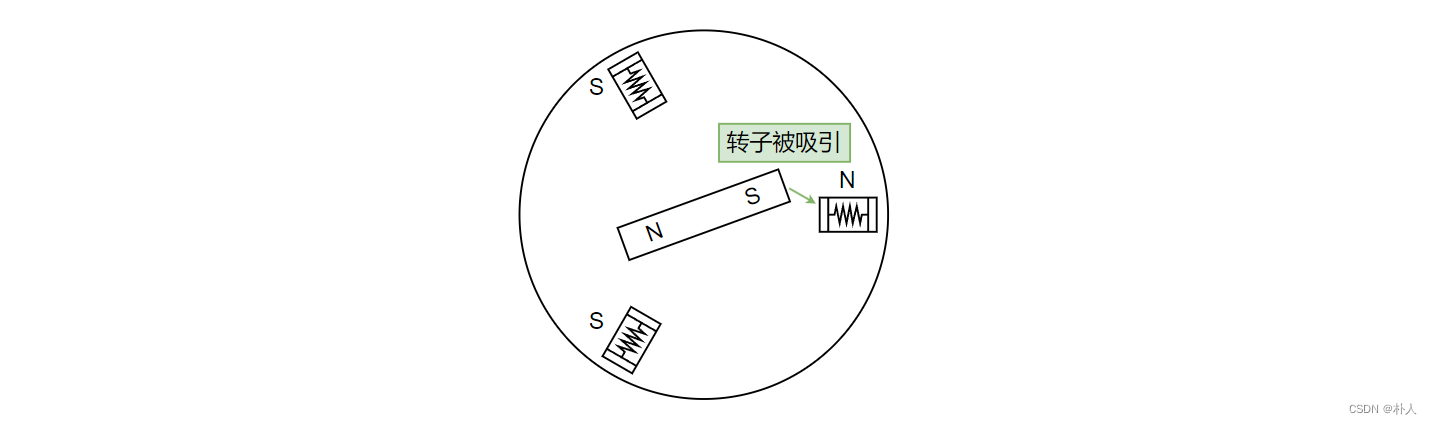
Η βασική ιδέα είναι να ελέγχεται τεχνητά το πηνίο για να δημιουργηθεί ένα μαγνητικό διάνυσμα πηνίου στόχου και ο άξονας d του μόνιμου μαγνήτη θα έλκεται στη θέση στόχο. Σημειώστε ότι αυτή η μέθοδος έλκει τον άξονα d στη θέση στόχο.
Πλεονεκτήματα: Εφόσον δημιουργείται η θέση στόχου, δεν χρειάζεται να γνωρίζουμε τη γωνία του ρότορα, ο ρότορας φυσικά θα έλκεται προς αυτήν.
Μειονεκτήματα: Η συνιστώσα της εφαπτομενικής δύναμης είναι μικρή και μια ελαφρά εφαπτομενική εξωτερική δύναμη μπορεί να προκαλέσει προφανή απομάκρυνση του ρότορα από τη θέση του.
Δεν ενδείκνυται η χρήση της μεθόδου έλξης του άξονα d για τον έλεγχο της ταχύτητας, επειδή ο σκοπός της έλξης του άξονα d δεν είναι η χρήση κωδικοποιητή Χωρίς τα δεδομένα του κωδικοποιητή, είναι δύσκολο να υπολογιστεί η ταχύτητα. Ο έλεγχος ταχύτητας μπορεί να χρησιμοποιήσει τη μέθοδο ελέγχου pid, αλλά επειδή η τιμή της ταχύτητας αλλάζει σχετικά ασταθή κατά την περιστροφή του κινητήρα και ο έλεγχος D είναι ανάλογος με την αλλαγή της ελεγχόμενης παραμέτρου, έτσι γενικά χρησιμοποιείται μόνο έλεγχος PI.
Η μέθοδος υπολογισμού της ταχύτητας είναι πολύ απλή, δηλαδή Τρέχουσα γωνία − Τελευταία καταγεγραμμένη γωνία Δ t frac{Τρέχουσα γωνία - Τελευταία καταγεγραμμένη γωνία}{Δέλτα{t}}Δtτρέχουσα γωνία−Τελευταία καταγεγραμμένη γωνία。
Ο έλεγχος ταχύτητας μπορεί να επιτευχθεί εισάγοντας τη διαφορά μεταξύ της ταχύτητας στόχου και της ταχύτητας σε πραγματικό χρόνο στον έλεγχο PI.
Το διάγραμμα μπλοκ ελέγχου FOC μεμονωμένης ταχύτητας είναι όπως φαίνεται παρακάτω.

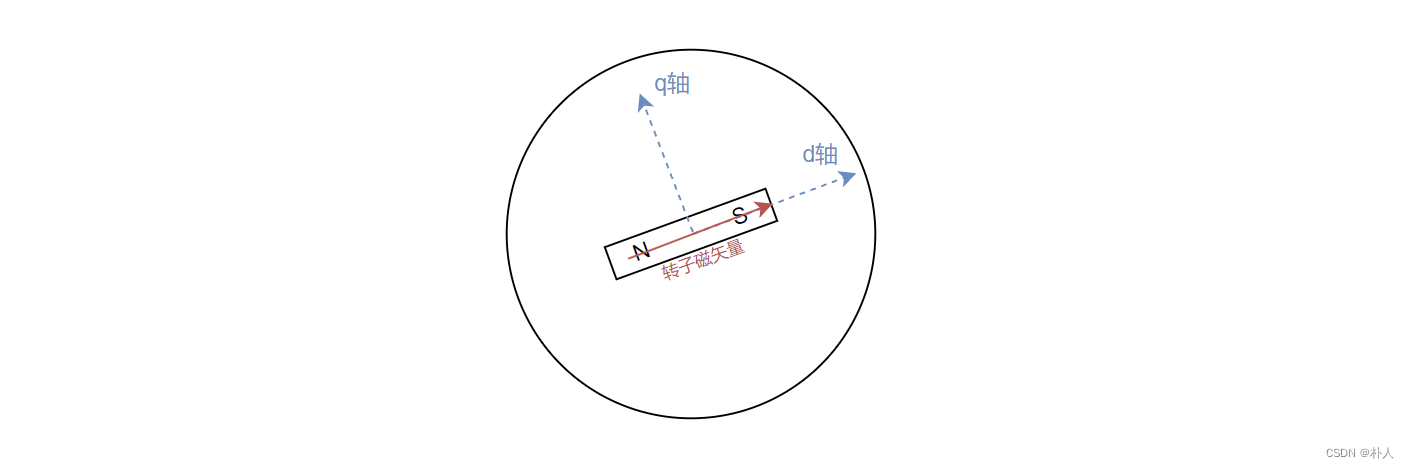
Το ρεύμα του κινητήρα αντιπροσωπεύει τη ροπή. Αφού αποσυνδεθεί η δύναμη του ρότορα από τον άξονα dq, μπορεί να βρεθεί ότι μόνο ο άξονας q συμβάλλει στην περιστροφή του κινητήρα και μόνο ο άξονας q παράγει ροπή, επομένως, μόνο το ρεύμα του άξονα q πρέπει να ελέγχεται ελέγξτε τη ροπή του κινητήρα. Εάν το ρεύμα του άξονα d ελέγχεται επίσης, ο ρυθμός χρήσης του ρεύματος κινητήρα μπορεί να βελτιωθεί, η παραγωγή θερμότητας μπορεί να μειωθεί και η μέγιστη απόδοση ροπής του κινητήρα μπορεί να αυξηθεί.
Λάβετε το ρεύμα του κινητήρα:
Ο άξονας dq είναι μια αφηρημένη έννοια, η οποία χρησιμοποιείται για τη διευκόλυνση της αποσύνδεσης της δύναμης του ρότορα Το ρεύμα μπορεί να υπολογιστεί με βάση το ρεύμα της γραμμής φάσης.
Υπάρχουν πολλοί τρόποι ανίχνευσης ρεύματος γραμμής φάσης Οι δύο πιο συνηθισμένες μέθοδοι είναι: 1. Η ανίχνευση ρεύματος τοποθετείται μεταξύ των σωλήνων τροφοδοσίας του άνω και κάτω βραχίονα γέφυρας, η οποία ονομάζεται διαδικτυακή ανίχνευση. 2. Η ανίχνευση ρεύματος τοποθετείται μεταξύ του κάτω βραχίονα και του GND, η οποία ονομάζεται ανίχνευση χαμηλής πλευράς.
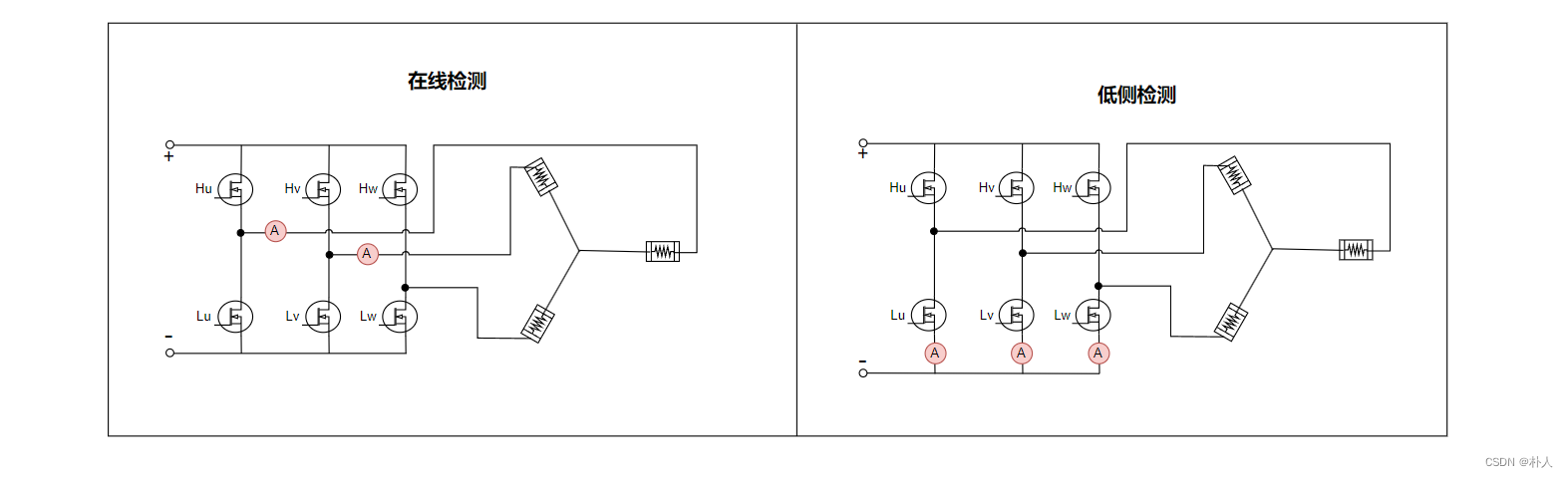
λόγω κόμβου流出电流 流入电流=0 , επομένως χρειάζονται μόνο δύο μονάδες ανίχνευσης ρεύματος για γραμμές τριών φάσεων. Ωστόσο, είναι καλύτερο να χρησιμοποιείτε τρεις μονάδες ανίχνευσης ρεύματος για ανίχνευση χαμηλής πλευράς, επειδή όταν ο κύκλος λειτουργίας pwm ενός συγκεκριμένου βραχίονα γέφυρας είναι 1 ή κοντά στο 1, δεν θα διέρχεται ρεύμα από τον κάτω βραχίονα γέφυρας ή το ρεύμα θα να είναι ασταθής και οι γραμμές τριών φάσεων θα μπορούν να συλλέγουν κανονικά ρεύμα, και οι τρεις μονάδες ανίχνευσης ρεύματος μπορούν να διαβαστούν κύκλος, και ο άλλος υπολογίζεται υποθέτοντας ότι το άθροισμα των ρευμάτων είναι 0. Η διαδικτυακή ανίχνευση δεν έχει αυτό το πρόβλημα, γιατί ανεξάρτητα από το αν ο κάτω βραχίονας της γέφυρας είναι κλειστός ή όχι, υπάρχει πάντα ρεύμα που ρέει μέσω της γραμμής φάσης. Δεδομένου ότι η τάση στη θέση online ανίχνευσης είναι σχετικά μεγάλη, η μονάδα ανίχνευσης ρεύματος για online ανίχνευση πρέπει να μπορεί να αντέξει μεγάλη τάση και είναι σχετικά ακριβή.
Αφού λάβετε τα ρεύματα γραμμής τριών φάσεων, στη συνέχεια βρείτε έναν τρόπο να τα μετατρέψετε σε ρεύματα άξονα dq.Το ρεύμα της γραμμής φάσης μπορεί να προβληθεί στον άξονα dq, έτσι ώστε το ρεύμα του άξονα dq να μπορεί να ληφθεί απευθείας, ωστόσο, η τρέχουσα μέθοδος κύριας ροής είναι να προβληθεί πρώτα ο άξονας dq α άλφααΆξονας και β βήταβάξονα (αυτό το βήμα ονομάζεται μετασχηματισμός Clark), και μετά α άλφααΆξονας και β βήταβΤο ρεύμα άξονα προβάλλεται στον άξονα dq (αυτό το βήμα ονομάζεται μετασχηματισμός πάρκου), επειδή θα χρησιμοποιηθεί σε πιο προηγμένη θέση FOC χωρίς αισθητήρα α άλφααΆξονας και β βήταβρεύμα άξονα.
μετασχηματισμός κλαρκ:
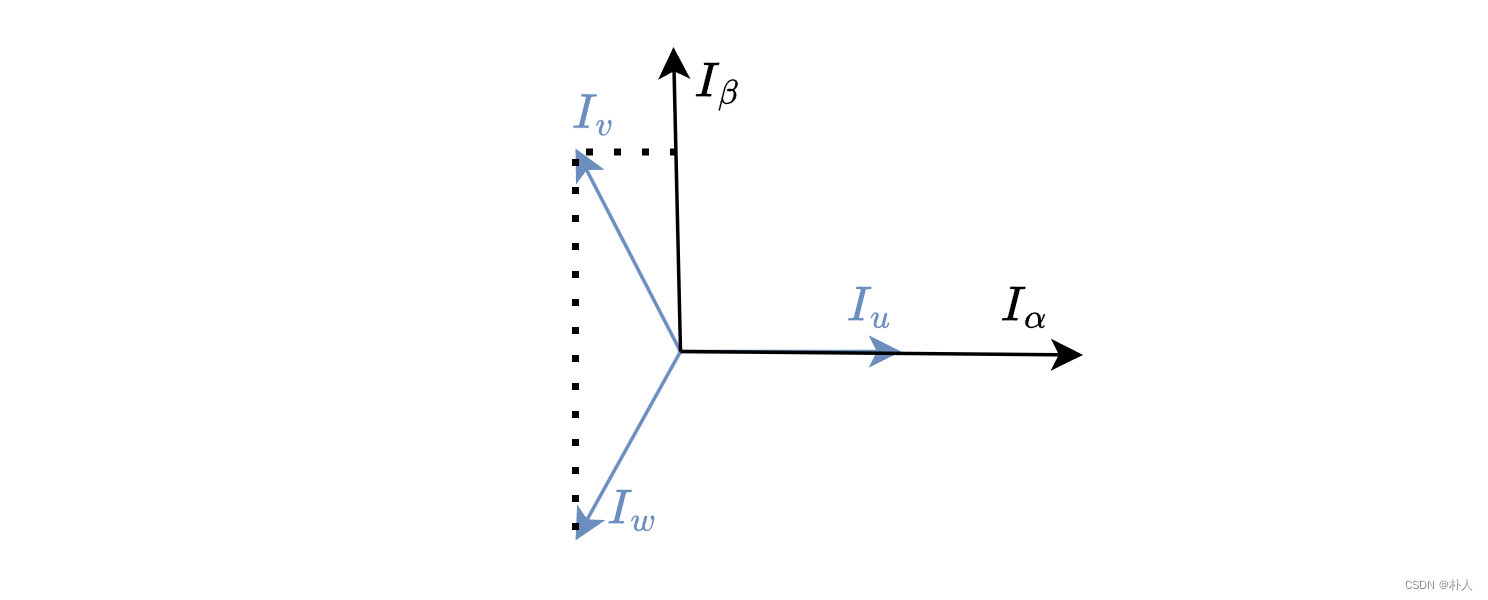
Το τριφασικό ρεύμα I u , I v , I w I_u, I_v, I_wΕγώu,Εγώv,ΕγώwΈργο σε I α , I β I_alpha,I_betaΕγώα,ΕγώβΌπως φαίνεται από τη γεωμετρική σχέση στο παρακάτω σχήμα, η έκφραση προβολής είναι:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 °{Εγώα=Εγώu−Εγώv∗συν60βαθμός−Εγώw∗συν60βαθμόςΕγώβ=Εγώv∗συν30βαθμός−Εγώw∗συν30βαθμός
{Εγώα=Εγώu−Εγώv∗συν60°−Εγώw∗συν60°Εγώβ=Εγώv∗συν30°−Εγώw∗συν30°
Μεταμόρφωση πάρκου:
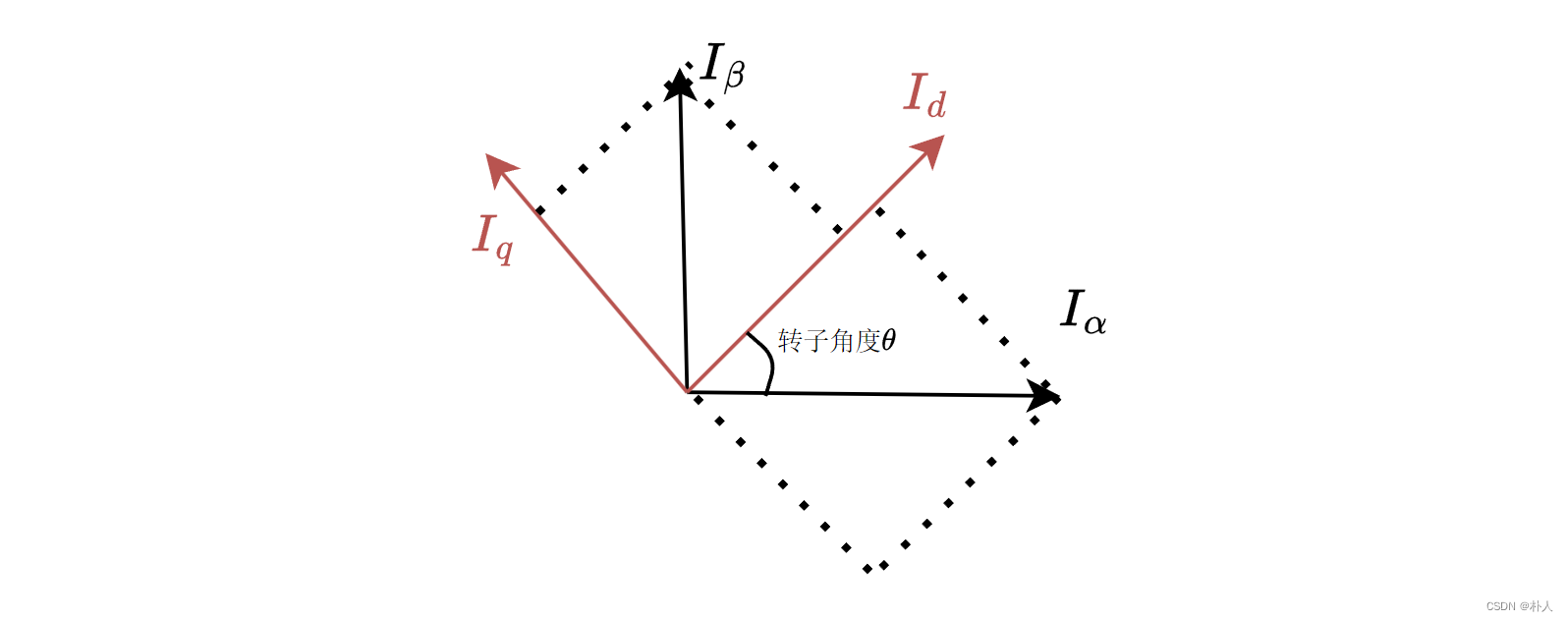
Θα I α , I β I_alpha,I_betaΕγώα,ΕγώβΟ άξονας προβάλλεται στον άξονα dq (στην πραγματικότητα πολλαπλασιάζεται με έναν πίνακα περιστροφής Όπως φαίνεται από τη γεωμετρική σχέση στο παρακάτω σχήμα, η έκφραση προβολής είναι:
{ I d = I α ∗ cos θ I β ∗ sin θ I q = − I α ∗ sin θ I β ∗ cos θ{Εγώρε=Εγώα∗συνθ Εγώβ∗αμαρτίαθΕγώq=−Εγώα∗αμαρτίαθ Εγώβ∗συνθ
{Εγώρε=Εγώα∗συνθ Εγώβ∗αμαρτίαθΕγώq=−Εγώα∗αμαρτίαθ Εγώβ∗συνθ
Το διάγραμμα ελέγχου FOC ενός μεμονωμένου ρεύματος είναι όπως φαίνεται παρακάτω Δεδομένου ότι η αλλαγή ρεύματος είναι σχετικά ασταθής, ο έλεγχος D που σχετίζεται με την ταχύτητα αλλαγής της ελεγχόμενης παραμέτρου συνήθως δεν χρησιμοποιείται εδώ, χρησιμοποιείται μόνο ο έλεγχος PI.

Εάν υπάρχει μια τέτοια απαίτηση: κατά τον έλεγχο της θέσης, καθορίστε τη μέγιστη ταχύτητα και το μέγιστο ρεύμα όταν ο κινητήρας επιστρέφει στη θέση ή όταν ελέγχετε την ταχύτητα, καθορίστε το μέγιστο ρεύμα όταν ο κινητήρας φτάσει στην ταχύτητα στόχου, τότε πρέπει να χρησιμοποιήσετε τον έλεγχο στάθμης συμβολοσειράς θέσης-ταχύτητας-ρεύματος. Ο έλεγχος καταρράκτη εδώ δεν ελέγχει τον κινητήρα να φτάσει σε μια συγκεκριμένη τιμή ρεύματος ή τιμή ταχύτητας, αλλά απαιτεί από τον κινητήρα να φτάσει τη μέγιστη τιμή ρεύματος ή τη μέγιστη τιμή ταχύτητας κατά τη διαδικασία ελέγχου, επειδή είναι αδύνατο να διατηρηθεί ο κινητήρας σε μία θέση. Υπάρχει ταχύτητα ή υπάρχει ρεύμα.
Ο έλεγχος καταρράκτη σημαίνει ότι η είσοδος του βρόχου ελέγχου ρεύματος είναι η έξοδος του προηγούμενου βρόχου ελέγχου Λαμβάνοντας ως παράδειγμα τον έλεγχο θέσης καταρράκτη, το διάγραμμα μπλοκ ελέγχου είναι:

Το θεωρητικό μέρος έχει πλέον τελειώσει. Έχουμε αποκτήσει τη μέθοδο υπολογισμού του SVPWM και τη διαδικασία ελέγχου θέσης, ταχύτητας και ρεύματος Το pwm duty, σε σύγκριση με τον τρόπο υλοποίησης, τον τρέχοντα χρόνο δειγματοληψίας, τη διαμόρφωση περιφερειακών, κ.λπ., το ακόλουθο πρακτικό μέρος χρησιμοποιεί τον εξαιρετικά κοινό, οικονομικά αποδοτικό king: smt32f103c8t6 και stm32cube εργαλεία, χωρίς τη χρήση της βιβλιοθήκης κινητήρα. Έλεγχος FOC από την αρχή.

Έχει αφοσιωθεί στην έρευνα της τεχνολογίας για περισσότερα από 30 χρόνια και είναι ικανός σε διάφορες γλώσσες όπως java, linux, javascript, php, css κ.λπ. Έχει κάνει πολλές συνεισφορές στον τομέα του ανοιχτού κώδικα σταθμός τεκμηρίωσης προγραμματιστή για να μοιραστείτε ορισμένα ζητήματα στην ανάπτυξη τεχνολογίας για μελλοντική αναφορά

Ταχυδρομείο[email protected]