моя контактная информация
Почтамезофия@protonmail.com
2024-07-11
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Предыдущий раздел Благодаря созданию SVPWM мы получили возможность контролировать любую силу, действующую на ротор двигателя. В этом разделе мы выбираем форму SVPWM развязки ротора по оси dq, полученную в предыдущем разделе, чтобы разумно управлять силой ротора и достигать конечной цели управления двигателем FOC: управления положением, скоростью и током.
Люди, читающие этот раздел, скорее всего, понимают ПИД-регулирование (пропорционально-пропорциональное, интегрально-дифференциальное), которое также ограничено моими возможностями. Я не буду давать здесь полного объяснения и не буду использовать расширенные методы управления.
Будь то положение, скорость или ток двигателя, все их можно рассматривать как контролируемые параметры.
С интуитивной точки зрения, когда значение контролируемого параметра в реальном времени меньше целевого значения, необходимо применить внешнюю силу для увеличения контролируемого параметра. Если приложенная внешняя сила слишком велика, контролируемый параметр будет превышать заданное значение, в результате чего амплитуда колебаний контролируемого параметра вблизи целевого значения будет становиться все больше и больше. Если приложенная внешняя сила слишком мала, параметр достигнет целевого значения; слишком медленно. Поэтому необходимо получить подходящую внешнюю силу, чтобы контролируемые параметры не колебались все сильнее и быстрее, а скорость регулировки не была слишком медленной. В основе этой идеи интуитивного управления лежит P в PID. При простом использовании P-управления установите размер внешней силы = разница между контролируемым параметром и целевым значением * P-коэффициент. Интуитивно понятно, что чем больше разница, тем больше действующая внешняя сила. Если коэффициент P установлен относительно небольшим, хотя контролируемый параметр не будет постоянно колебаться и может медленно стабилизироваться до целевого значения, скорость регулировки слишком медленная. В это время можно добавить D-управление ПИД-регулятора, чтобы сделать это. контролируемый параметр первоначально колеблется. Быстрое уменьшение до целевого значения.
Давайте подумаем об управлении D с интуитивной точки зрения. Когда контролируемый параметр приближается или превышает целевое значение при чистом управлении P, корректирующая сила в направлении, противоположном скорости, помогает контролируемому параметру затормозиться вблизи целевого значения, позволяя контролируемому параметру затормозиться. Тормозить до целевого значения быстрее. Эта корректирующая сила в направлении, противоположном скорости, представляет собой управление D. После добавления управления D размер внешней силы управления = разница между контролируемым параметром и целевым значением * коэффициент P, скорость контролируемого параметра * коэффициент D. При использовании чистого управления D, поскольку скорость контролируемого параметра равна 0 в исходном состоянии, управляемый параметр не будет получать внешнюю силу. Также можно видеть, что управление P обеспечивает внешнюю силу, а управление D ограничивает внешнюю силу. Если коэффициент D выбран слишком большим, небольшая скорость может вызвать огромную внешнюю силу, если коэффициент D выбран слишком маленьким, этого будет недостаточно для ограничения внешней силы производства P-управления, и контролируемые параметры будут стабилизироваться медленно; .
Давайте подумаем об I-управлении с интуитивной точки зрения. Когда на контролируемый параметр действует нагрузка, внешней силы, обеспечиваемой простым P-управлением, может быть недостаточно для поддержания нагрузки. Поэтому такой механизм можно добавить, чтобы уменьшить разницу между. Контролируемый параметр и целевое значение с течением времени можно получить мощность, необходимую для достижения контролируемым параметром целевого значения при наличии нагрузки. Этот механизм я контролирую. После добавления I-управления размер внешней силы управления = разница между контролируемым параметром и целевым значением * Коэффициент P, скорость контролируемого параметра * Коэффициент D, разница между контролируемым параметром и целевым значением накапливается с течением времени * I коэффициент.
При управлении двигателем без особых обстоятельств, поскольку ось d не способствует вращению двигателя, ПИД-регулирование может управлять только силой оси q, а ось d можно контролировать или выходной сигнал можно контролировать. быть непосредственно установлен на 0.
При управлении скоростью и током, ограниченном точностью выборки и частотой, скорость и ток нестабильны и быстро меняются. Например, следующий показатель представляет собой непосредственно рассчитанное значение скорости двигателя. Существует множество пилообразных значений, которые колеблются вокруг истинного значения. Если такое значение используется напрямую, это приведет к сильным колебаниям выходного сигнала ПИД-регулятора.

На рисунке ниже видно, что после фильтрации оно ближе к истинному значению: Существует множество методов фильтрации, таких как фильтрация нижних частот и фильтрация Калмана. Суть заключается в том, чтобы оценить значение, близкое к реальному, в данных, смешанных с шумом. Поскольку фильтрация — это очень большая тема, принцип в этом разделе объясняться не будет. Непосредственно просмотреть код можно в последующей практической части. Мы просто напоминаем, что расчеты фильтрации необходимо выполнить до ввода ПИД-регулятора.
Существует множество методов фильтрации, таких как фильтрация нижних частот и фильтрация Калмана. Суть заключается в том, чтобы оценить значение, близкое к реальному, в данных, смешанных с шумом. Поскольку фильтрация — это очень большая тема, принцип в этом разделе объясняться не будет. Непосредственно просмотреть код можно в последующей практической части. Мы просто напоминаем, что расчеты фильтрации необходимо выполнить до ввода ПИД-регулятора.
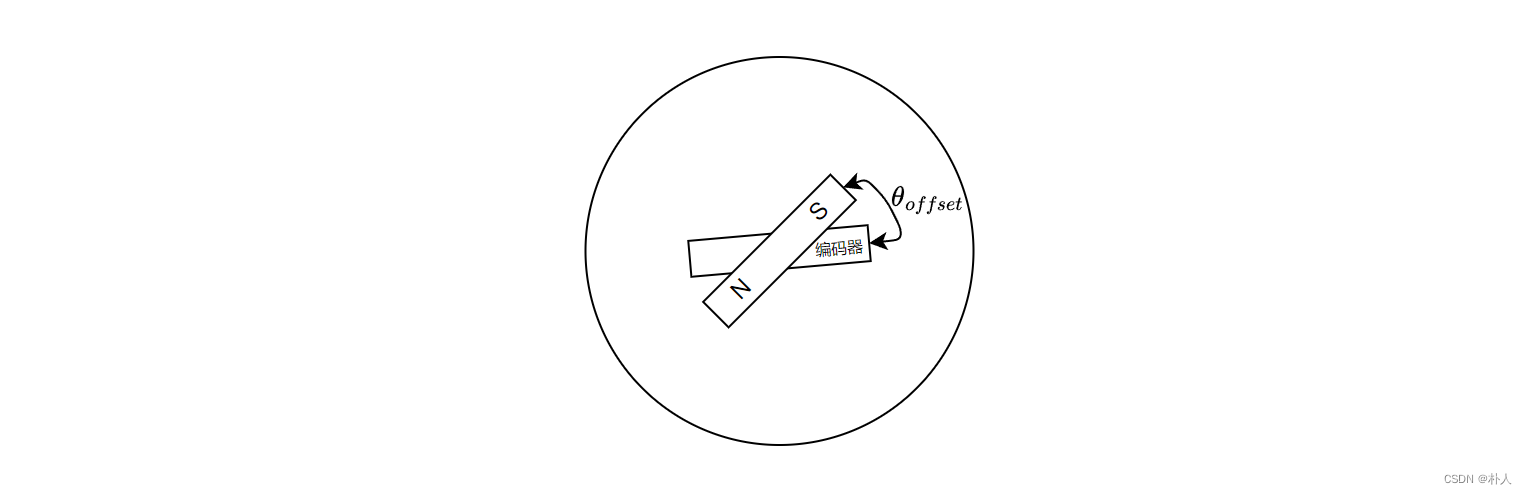
Положение относится к углу. Следует отметить, что существует два физических угла: один — угол двигателя, а другой — угол ротора. Это два разных угла. Энкодер двигателя установлен на корпусе ротора, поэтому энкодер получает угол корпуса ротора, а ротор расположен внутри. Поскольку корпус ротора и ротор прикреплены друг к другу, между двумя углами существует фиксированное смещение. . При установке энкодер нулевого градуса устройства не может быть обращен точно к постоянному магниту ротора. Угол энкодера определяется энкодером, также может быть известен угол ротора. Как получить это фиксированное смещение, будет объяснено в последующей практической части. В этом разделе вам нужно выполнить только теоретическую часть расчета. Результирующий магнитный вектор действует на постоянный магнит ротора, поэтому теоретический расчет основан на угле ротора.
Существует два метода управления положением ротора:
PID-метод:
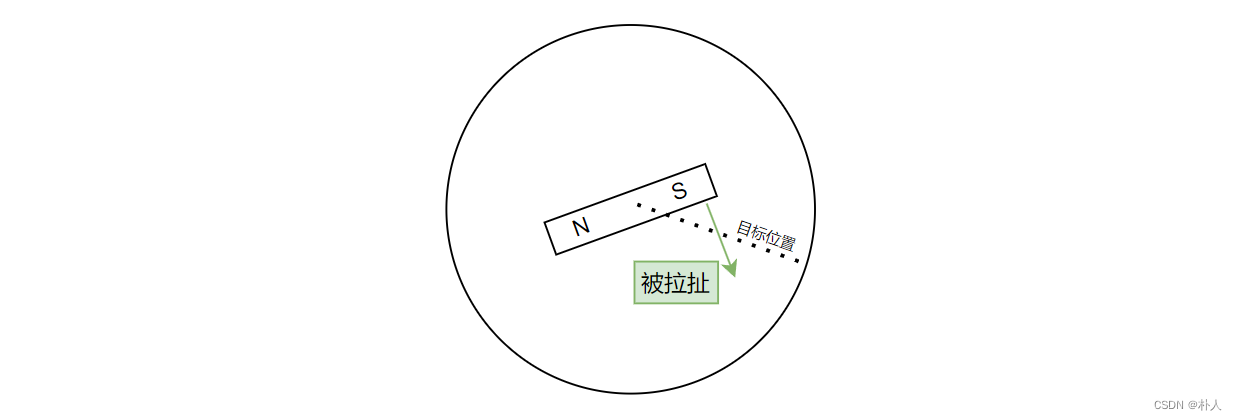
Интуитивная идея состоит в том, чтобы использовать ось q ротора, чтобы непрерывно тянуть ротор влево и вправо. Как только ротор отклоняется от целевого положения, приложите обратную силу к оси q, чтобы тянуть. Чем больше отклонение, тем больше. тянущая сила, и ротор возвращается в заданное положение.
Преимущества: ось q может обеспечить большую силу, а управление положением происходит быстрее и эффективнее.
Недостатки: поскольку ось q на 90 градусов отличается от вектора магнитного поля постоянного магнита ротора, необходимо знать положение (угол) ротора в реальном времени.
Поскольку положение ротора в реальном времени легко получить с помощью энкодера, в большинстве случаев для управления положением используется pid.
Блок-схема управления ВОК отдельного места показана ниже. Изображение означает, что нужно ввести целевое положение, вычислить разницу с углом, рассчитанным энкодером, а затем ввести пид-регулятор, чтобы контролировать только силу ротора по оси q, установить силу оси d непосредственно на 0, и, наконец, установите силу оси dq (0 ~ 1), которая вводится в функцию SVPWM, полученную ранее, а выходной сигнал представляет собой рабочий цикл ШИМ плеча моста uvw.Здесь следует отметить введенную целевую позицию. θ в тета_{в}θвЭто может быть угол ротора, угол энкодера или угол многооборотности, если он связан с обратной связью. θ тетаθПросто держите тот же угол.

Принудительное сопротивление по оси D:
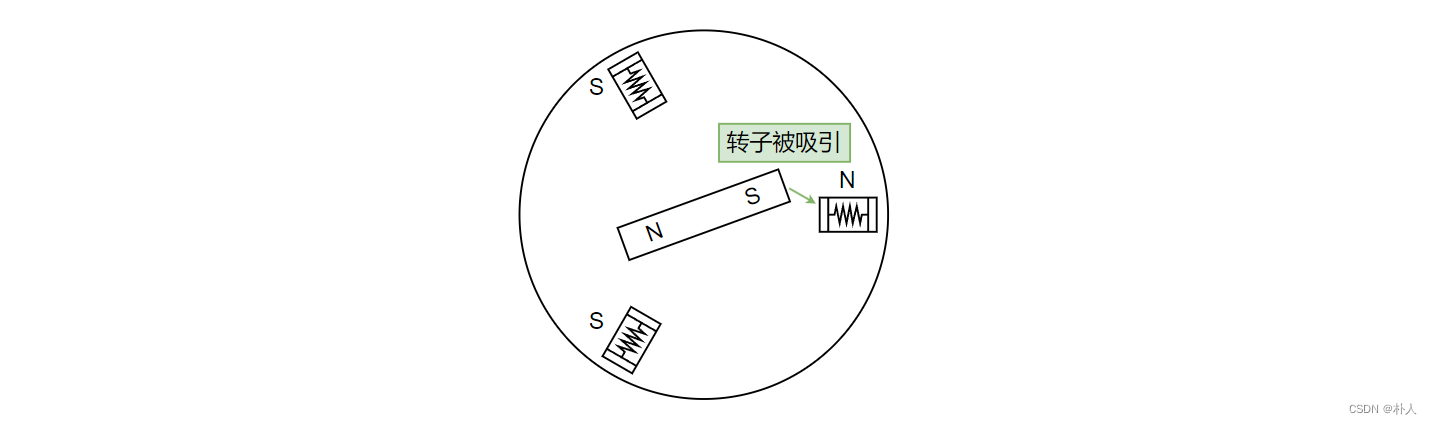
Основная идея состоит в том, чтобы искусственно управлять катушкой для создания целевого магнитного вектора катушки, а ось d постоянного магнита будет притягиваться к целевому положению. Обратите внимание, что этот метод притягивает ось d к целевой позиции.
Преимущества: поскольку целевое положение генерируется, нет необходимости знать угол ротора, ротор естественным образом притягивается к нему.
Недостатки: Тангенциальная составляющая силы мала, и небольшая тангенциальная внешняя сила может привести к явному смещению ротора из положения.
Нецелесообразно использовать метод перетаскивания по оси d для управления скоростью, поскольку цель перетаскивания по оси d не заключается в использовании энкодера. Без данных энкодера трудно вычислить скорость. Для управления скоростью можно использовать метод ПИД-регулирования, но поскольку значение скорости изменяется относительно нестабильно во время вращения двигателя, а управление D пропорционально изменению управляемого параметра, поэтому обычно используется только ПИ-регулирование.
Метод расчета скорости очень прост, то есть Текущий угол — последний записанный угол Δ t frac {Текущий угол — последний записанный угол {Delta {t}}Δттекущий угол−Последний записанный угол。
Управление скоростью может быть достигнуто путем ввода разницы между целевой скоростью и скоростью в реальном времени в ПИ-управление.
Блок-схема управления индивидуальной скоростью FOC показана ниже.

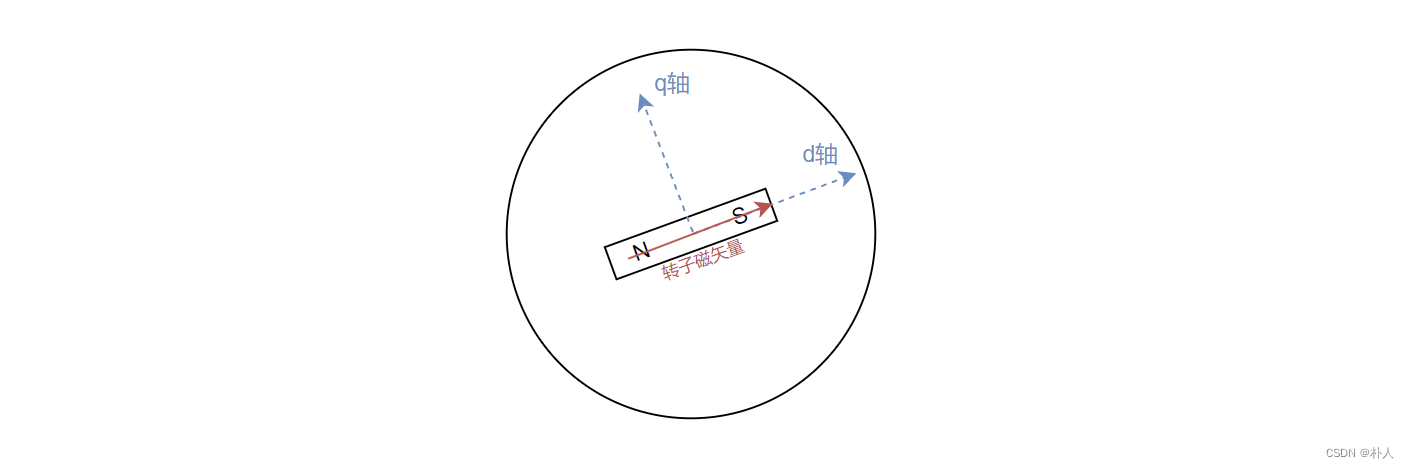
Ток двигателя представляет собой крутящий момент. После того, как сила ротора отделена от оси dq, можно обнаружить, что только ось q способствует вращению двигателя, и только ось q генерирует крутящий момент. Следовательно, для управления необходимо контролировать только ток оси q. контролировать крутящий момент двигателя. Если ток по оси d также контролируется, можно улучшить коэффициент использования тока двигателя, уменьшить тепловыделение и увеличить максимальный выходной крутящий момент двигателя.
Получите ток двигателя:
Ось dq ротора — это абстрактное понятие, которое используется для облегчения развязки силы ротора. Ток оси dq не может быть обнаружен напрямую. Ток, который можно определить напрямую, — это ток в цепи фазы двигателя. ток можно рассчитать на основе тока фазной линии.
Существует множество способов определения тока фазной линии. Два наиболее распространенных метода: 1. Обнаружение тока осуществляется между силовыми трубками верхнего и нижнего плеча моста, что называется онлайн-обнаружением. 2. Обнаружение тока размещается между нижним рычагом и заземлением, что называется обнаружением низкого уровня.
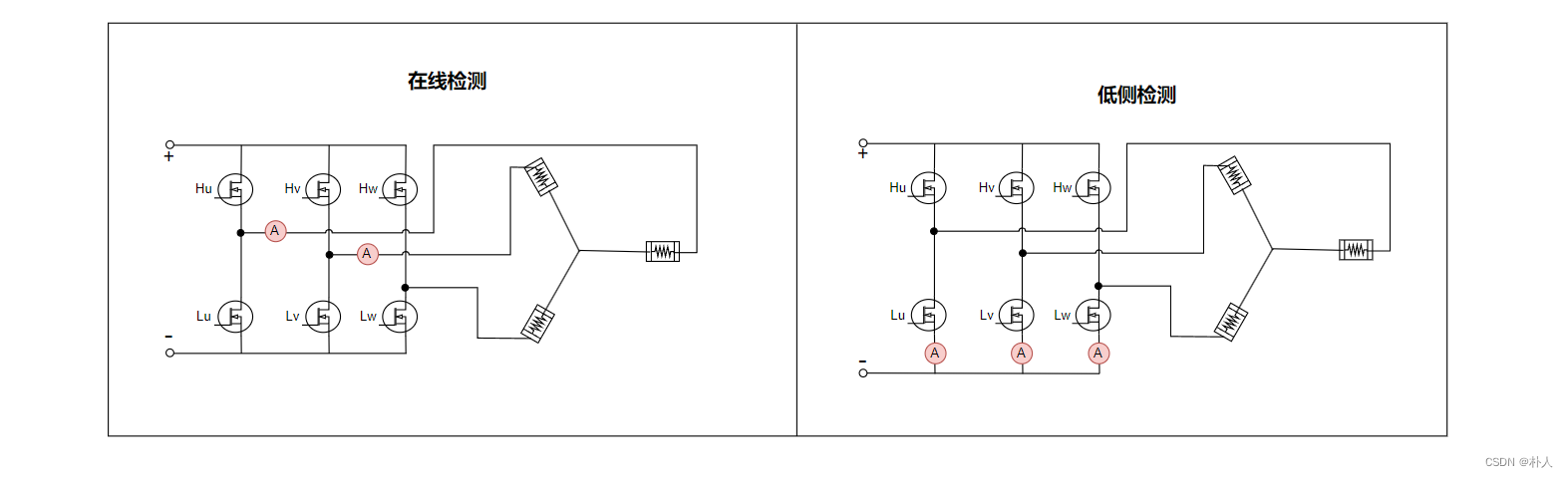
из-за узла流出电流 流入电流=0 , поэтому для трехфазных линий необходимы только два блока определения тока. Однако лучше всего использовать три блока обнаружения тока для обнаружения нижнего плеча, потому что, когда рабочий цикл ШИМ определенного плеча моста равен 1 или близок к 1, ток не будет проходить через нижнее плечо моста или ток будет будут нестабильными, и три фазовые линии будут только. Оставшийся блок измерения тока может нормально собирать ток. После того, как есть три блока измерения тока, все три блока измерения тока могут быть считаны в соответствии с обязанностью. цикл, а другой рассчитывается в предположении, что сумма токов равна 0. Онлайн-обнаружение не имеет этой проблемы, поскольку независимо от того, закрыто нижнее плечо моста или нет, через фазовую линию всегда течет ток. Поскольку напряжение в позиции оперативного обнаружения относительно велико, блок определения тока для оперативного обнаружения должен выдерживать большое напряжение и является относительно дорогим.
После получения трехфазных линейных токов найдите способ преобразовать их в токи по оси dq.Ток фазной линии можно спроецировать на ось dq, так что ток по оси dq можно получить напрямую. Однако текущий основной метод заключается в том, чтобы сначала проецировать ось dq на нее. α альфаαОсь и β бетаβоси (этот шаг называется преобразованием Кларка), а затем α альфаαОсь и β бетаβТок оси проецируется на ось dq (этот шаг называется преобразованием парковки), поскольку он будет использоваться в более продвинутом положении бездатчикового FOC. α альфаαОсь и β бетаβток оси.
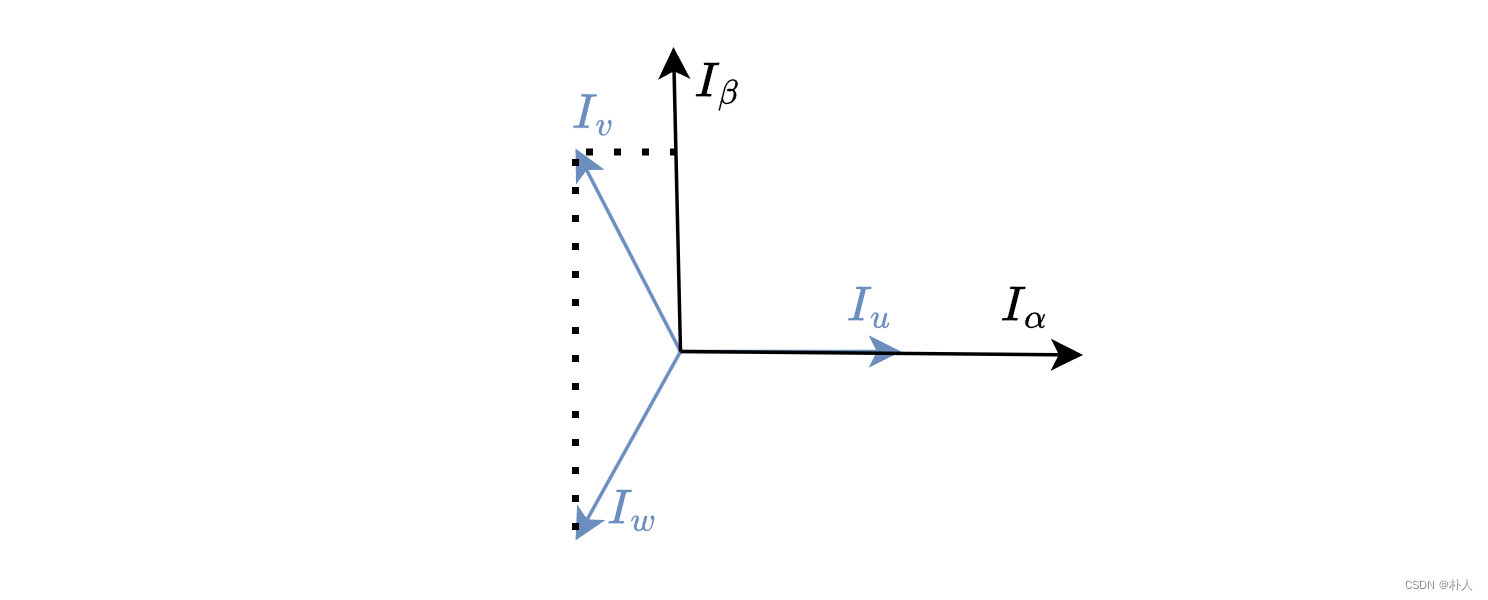
трансформация Кларка:
Трехфазный ток Я у, я в, я ж Я_у, я_в, я_жяты,яв,яжПроект для Я α, Я β I_альфа,I_бетаяα,яβКак видно из геометрической зависимости на рисунке ниже, выражение проекции имеет вид:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 °{яα=яты−яв∗потому что60степень−яж∗потому что60степеньяβ=яв∗потому что30степень−яж∗потому что30степень
{яα=яты−яв∗потому что60°−яж∗потому что60°яβ=яв∗потому что30°−яж∗потому что30°
трансформация парка:
Воля Я α, Я β I_альфа,I_бетаяα,яβОсь проецируется на ось dq (фактически умножается на матрицу вращения). Как видно из геометрического соотношения на рисунке ниже, выражение проекции имеет вид:
{ Я д = Я α ∗ сos θ Я β ∗ sin θ Я q = − Я α ∗ sin θ Я β ∗ cos θ{яг=яα∗потому чтоθ яβ∗грехθяд=−яα∗грехθ яβ∗потому чтоθ
{яг=яα∗потому чтоθ яβ∗грехθяд=−яα∗грехθ яβ∗потому чтоθ
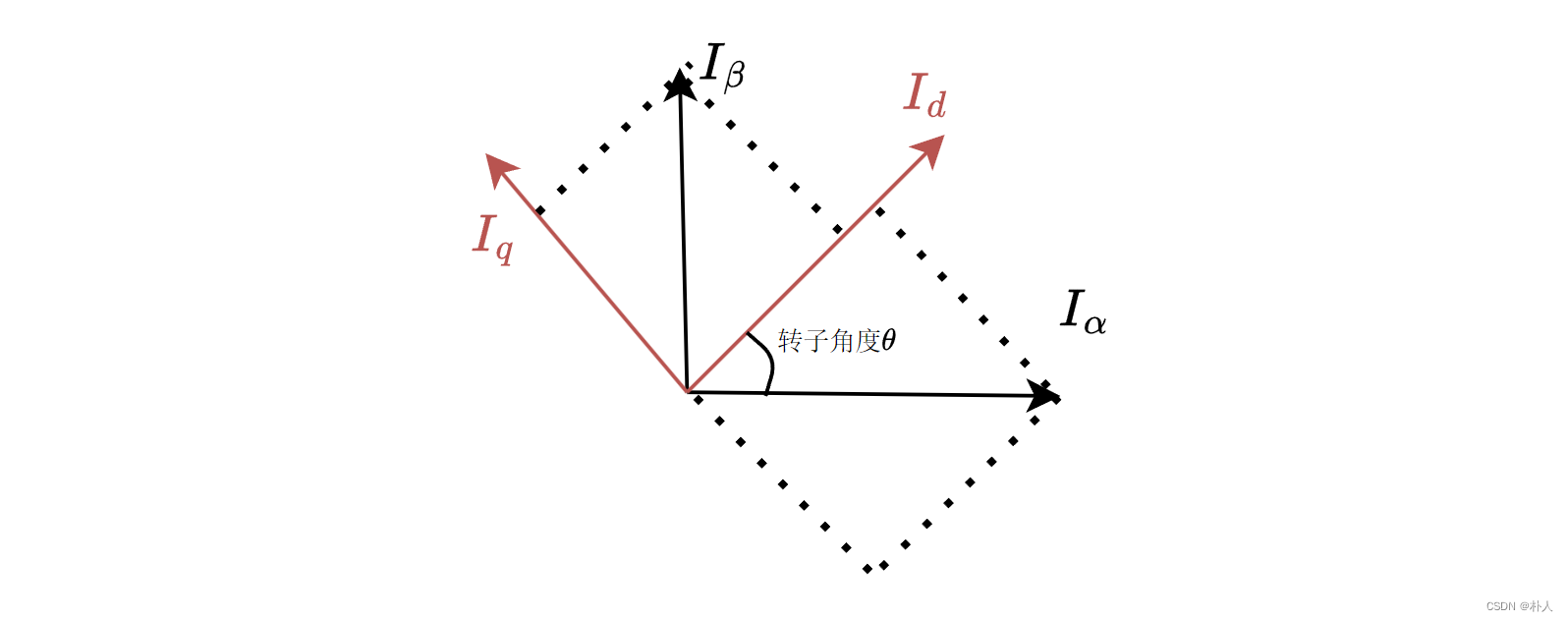
Схема управления FOC для одного тока показана ниже. Поскольку изменение тока относительно нестабильно, управление D, связанное со скоростью изменения контролируемого параметра, здесь обычно не используется, используется только ПИ-управление.

Если есть такое требование: при контроле положения указывать максимальную скорость и максимальный ток при возврате двигателя в положение или при контроле скорости указывать максимальный ток при достижении двигателем заданной скорости, то нужно использовать ; контроль уровня струны положение-скорость-ток. Каскадное управление здесь не управляет двигателем для достижения определенного значения тока или значения скорости, а требует, чтобы двигатель достиг максимального значения тока или значения максимальной скорости в процессе управления, поскольку невозможно поддерживать двигатель в одном положении. Есть скорость или есть течение.
Каскадное управление означает, что вход текущего контура управления является выходом предыдущего контура управления. Если взять в качестве примера каскадное управление положением, то блок-схема управления будет следующей:

Теоретическая часть на этом закончена. Мы получили метод расчета SVPWM и процесс управления положением, скоростью и током. Однако на практике мы столкнемся с различными проблемами, такими как последовательность фазных линий и. По сравнению с тем, как реализовать, время выборки тока, конфигурацию периферийных устройств и т. д., в следующей практической части используются ультра-обычные экономичные однокристальные инструменты: smt32f103c8t6 и stm32cube, без использования библиотеки двигателей, для достижения полной цели. Управление ВОК с нуля.

Он посвятил себя исследованию технологий более 30 лет и владеет различными языками, такими как Java, Linux, Javascript, php, css и т. д. Он внес большой вклад в область открытого исходного кода. Станция документации для разработчиков, где можно поделиться некоторыми проблемами в разработке технологий для дальнейшего использования. Все ознакомьтесь.

Почтамезофия@protonmail.com