2024-07-11
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
पूर्वखण्डः , SVPWM इत्यस्य व्युत्पत्तिद्वारा अस्माभिः मोटररोटरस्य उपरि किमपि बलं नियन्त्रयितुं क्षमता प्राप्ता अस्ति । अस्मिन् खण्डे वयं रोटरबलं यथोचितरूपेण नियन्त्रयितुं तथा च FOC मोटरनियन्त्रणस्य अन्तिमलक्ष्यं प्राप्तुं पूर्वखण्डे प्राप्तस्य रोटर dq-अक्षवियुग्मनस्य SVPWM रूपं चयनं कुर्मः: स्थितिः, गतिः, वर्तमाननियन्त्रणं च।
ये जनाः एतत् खण्डं पठन्ति ते अधिकतया PID (Proportional proportion, Integral integral, Derivative differential) नियन्त्रणं अवगच्छन्ति, यत् मम क्षमतया अपि सीमितम् अस्ति, अहम् अत्र सम्पूर्णं व्याख्यानं न दास्यामि, न च उन्नतनियन्त्रणविधयः समाविष्टाः भविष्यन्ति
मोटरस्य स्थितिः, वेगः, प्रवाहः वा भवतु, ते सर्वे नियन्त्रितमापदण्डाः इति गणयितुं शक्यन्ते ।
सहजदृष्ट्या यदा नियन्त्रितमापदण्डस्य वास्तविकसमयमूल्यं लक्ष्यमूल्यात् न्यूनं भवति तदा नियन्त्रितमापदण्डं वर्धयितुं बाह्यबलं प्रयोक्तव्यम् यदि प्रयुक्तं बाह्यबलम् अतिबृहत् भवति तर्हि नियन्त्रितमापदण्डः अतिक्रमितः भविष्यति, येन लक्ष्यमूल्यानां समीपे नियन्त्रितमापदण्डस्य दोलनव्याप्तिः बृहत्तरं भवति यदि प्रयुक्तं बाह्यबलम् अत्यल्पं भवति तर्हि मापदण्डः लक्ष्यमूल्यं प्राप्स्यति अति मन्दम् । अतः नियन्त्रितमापदण्डाः अधिकाधिकं हिंसकरूपेण न दोलन्ति, समायोजनवेगः अपि अतिमन्दः न भविष्यति इति कृत्वा उपयुक्तं बाह्यबलं प्राप्तुं आवश्यकम् अस्मात् सहजज्ञानविचारात् PID मध्ये P इति । केवलं P नियन्त्रणस्य उपयोगं कुर्वन् बाह्यबलस्य आकारं = नियन्त्रितमापदण्डस्य लक्ष्यमूल्यस्य च मध्ये अन्तरं * P गुणांकस्य मध्ये अन्तरं सेट् कुर्वन्तु एतत् वक्तुं अतीव सहजं भवति यत् अन्तरं यत्किमपि बृहत् भवति तथा तथा बाह्यबलं प्रयुक्तं भवति यदि P गुणांकः तुल्यकालिकरूपेण लघुः सेट् भवति, यद्यपि नियन्त्रितः पैरामीटर् सर्वदा दोलनं न करिष्यति तथा च लक्ष्यमूल्यं यावत् धीरेण स्थिरं भवितुम् अर्हति, तथापि समायोजनवेगः अतीव मन्दः भवति, अस्मिन् समये PID इत्यस्य D नियन्त्रणं योजयितुं शक्यते नियन्त्रित पैरामीटर मूलतः दोलनं कुर्वन्ति शीघ्रं लक्ष्यमूल्यं प्रति संकुचन्ति।
D नियन्त्रणस्य विषये सहजदृष्ट्या चिन्तयामः यदा नियन्त्रितः पैरामीटर् शुद्ध P नियन्त्रणस्य अन्तर्गतं लक्ष्यमूल्यं समीपं गच्छति वा पारयति तदा गतिविपरीतदिशि एकः सुधारबलः लक्ष्यमूल्यस्य समीपे नियन्त्रितपैरामीटर् ब्रेकं कर्तुं साहाय्यं करोति ब्रेक। वेगस्य विपरीतदिशि स्थितं एतत् सुधारबलं D नियन्त्रणम् अस्ति । D नियन्त्रणं योजयित्वा नियन्त्रणबाह्यबलस्य आकारः = नियन्त्रितमापदण्डस्य लक्ष्यमूल्येन च मध्ये अन्तरं * P गुणांकनियन्त्रितपैरामीटरवेगः * D गुणांकः शुद्ध D नियन्त्रणस्य उपयोगे नियन्त्रितमापदण्डस्य गतिः प्रारम्भिकस्थितौ 0 भवति इति कारणतः नियन्त्रितमापदण्डः बाह्यबलं न प्राप्स्यति इति अपि द्रष्टुं शक्यते यत् P नियन्त्रणं बाह्यबलं प्रदाति तथा D नियन्त्रणं बाह्यबलं बाधते यदि D गुणांकः अतिबृहत् चयनितः भवति तर्हि किञ्चित् वेगः विशालं बाह्यबलं जनयितुं शक्नोति यदि D गुणांकः अतिलघुः चयनितः भवति तर्हि P नियन्त्रण-उत्पादनस्य बाह्यबलं बाध्यं कर्तुं पर्याप्तं न भविष्यति, नियन्त्रित-मापदण्डाः च मन्दं भविष्यन्ति स्थिरं कुर्वन्ति।
सहजदृष्ट्या I नियन्त्रणस्य विषये चिन्तयामः यदा नियन्त्रितमापदण्डे भारः भवति तदा सरलेन P नियन्त्रणेन प्रदत्तं बाह्यबलं भारस्य समर्थनार्थं पर्याप्तं न भवेत् अतः, एतादृशं तन्त्रं योजयितुं शक्यते नियन्त्रितमापदण्डं लक्ष्यमूल्यं च कालान्तरे सञ्चितं, नियन्त्रितमापदण्डस्य लक्ष्यमूल्यं प्राप्तुं आवश्यकी शक्तिः यदा भारः भवति तदा प्राप्तुं शक्यते । एतत् तन्त्रं अहं नियन्त्रयामि। I नियन्त्रणं योजयित्वा नियन्त्रणबाह्यबलस्य आकारः = नियन्त्रितमापदण्डस्य लक्ष्यमूल्ये च मध्ये अन्तरं * P गुणांकं, नियन्त्रितमापदण्डस्य गतिः * D गुणांकः, नियन्त्रितमापदण्डस्य लक्ष्यमूल्येन च मध्ये अन्तरं कालान्तरे सञ्चितं भवति * I गुणांक ।
मोटरस्य नियन्त्रणे विशेषपरिस्थित्या विना d-अक्षः मोटरस्य परिभ्रमणस्य योगदानं न ददाति इति कारणतः pid नियन्त्रणं केवलं q-अक्षस्य बलं नियन्त्रयितुं शक्नोति, d-अक्षं नियन्त्रयितुं वा निर्गमं वा कर्तुं शक्नोति प्रत्यक्षतया 0 इति सेट् भवतु ।
गतिनियन्त्रणे धारानियन्त्रणे च नमूनानां सटीकता आवृत्त्या च सीमितं भवति, गतिः धारा च अस्थिरं भवति, यथा, निम्नलिखितचित्रं मोटरवेगस्य प्रत्यक्षतया गणितं मूल्यं भवति .यदि एतादृशं मूल्यं प्रत्यक्षतया उपयुज्यते तर्हि PID निर्गमस्य महती उतार-चढावः भविष्यति ।

अधोलिखितं चित्रं दर्शयति यत् फ़िल्टरिंग् कृत्वा सत्यमूल्यस्य समीपे एव भवति : अत्र बहवः छाननविधयः सन्ति, यथा निम्न-पास्-छननम्, कलमैन्-छननम् च सारः अस्ति यत् कोलाहलेन सह मिश्रितेषु दत्तांशेषु वास्तविकमूल्यानां समीपे मूल्यस्य अनुमानं करणीयम् । यतः फ़िल्टरिंग् अतीव बृहत् विषयः अस्ति, अतः अस्मिन् खण्डे भवान् प्रत्यक्षतया कोड् द्रष्टुं शक्नोति यत् PID नियन्त्रकं निवेशयितुं पूर्वं फ़िल्टरिंग् गणनाः कर्तुं आवश्यकाः सन्ति ।
अत्र बहवः छाननविधयः सन्ति, यथा निम्न-पास्-छननम्, कलमैन्-छननम् च सारः अस्ति यत् कोलाहलेन सह मिश्रितेषु दत्तांशेषु वास्तविकमूल्यानां समीपे मूल्यस्य अनुमानं करणीयम् । यतः फ़िल्टरिंग् अतीव बृहत् विषयः अस्ति, अतः अस्मिन् खण्डे भवान् प्रत्यक्षतया कोड् द्रष्टुं शक्नोति यत् PID नियन्त्रकं निवेशयितुं पूर्वं फ़िल्टरिंग् गणनाः कर्तुं आवश्यकाः सन्ति ।
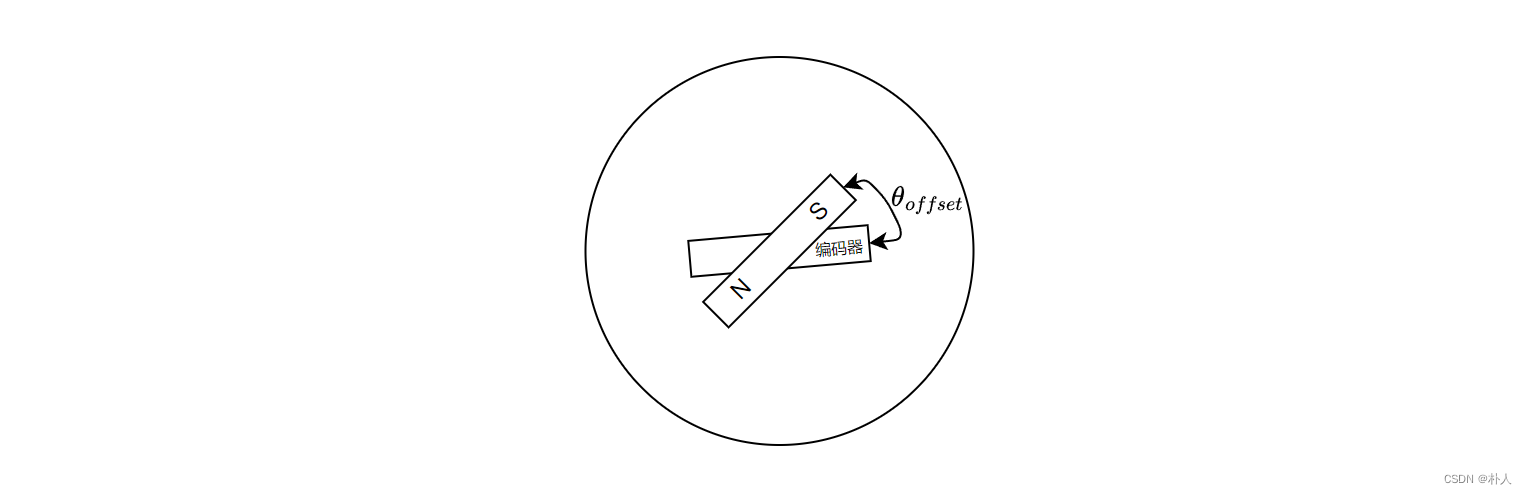
स्थितिः कोणं निर्दिशति एतत् ज्ञातव्यं यत् द्वौ भौतिककोणौ स्तः, एकः मोटरकोणः अपरः रोटरकोणः । मोटर-एन्कोडरः रोटर-आवासस्य उपरि स्थापितः भवति, अतः एन्कोडरः रोटर-आवासस्य कोणं प्राप्नोति, रोटर-आवासः च अन्तः स्थितः भवति यतः रोटर-आवासः रोटरः च परस्परं निहिताः सन्ति, अतः द्वयोः कोणयोः मध्ये नियतः विक्षेपः भवति .स्थापनसमये एन्कोडरः यन्त्रस्य शून्य-अङ्कः रोटर-स्थायी-चुम्बकस्य सम्यक् सम्मुखः न भवितुम् अर्हति । एन्कोडरकोणः एन्कोडरेन प्रदत्तः भवति, रोटरकोणः अपि ज्ञातुं शक्यते । एतत् नियत-अफसेट् कथं प्राप्तव्यम् इति अनन्तरं व्यावहारिकभागे व्याख्यातं भविष्यति । परिणामी चुम्बकीयसदिशः रोटरस्थायिचुम्बके कार्यं करोति, अतः सैद्धान्तिकगणना रोटरकोणस्य आधारेण भवति ।
रोटरस्थाननियन्त्रणं प्राप्तुं द्वौ विधिः स्तः- १.
pid विधिः : १.
सहजविचारः अस्ति यत् रोटरस्य q-अक्षस्य उपयोगेन रोटरस्य वाम-दक्षिणयोः निरन्तरं आकर्षणं करणीयम् आकर्षणबलं, रोटरं च लक्ष्यस्थानं प्रति आगच्छति ।
लाभाः : q-अक्षः बृहत्तरं बलं दातुं शक्नोति, तथा च स्थितिनियन्त्रणं द्रुततरं अधिकं शक्तिशाली च भवति ।
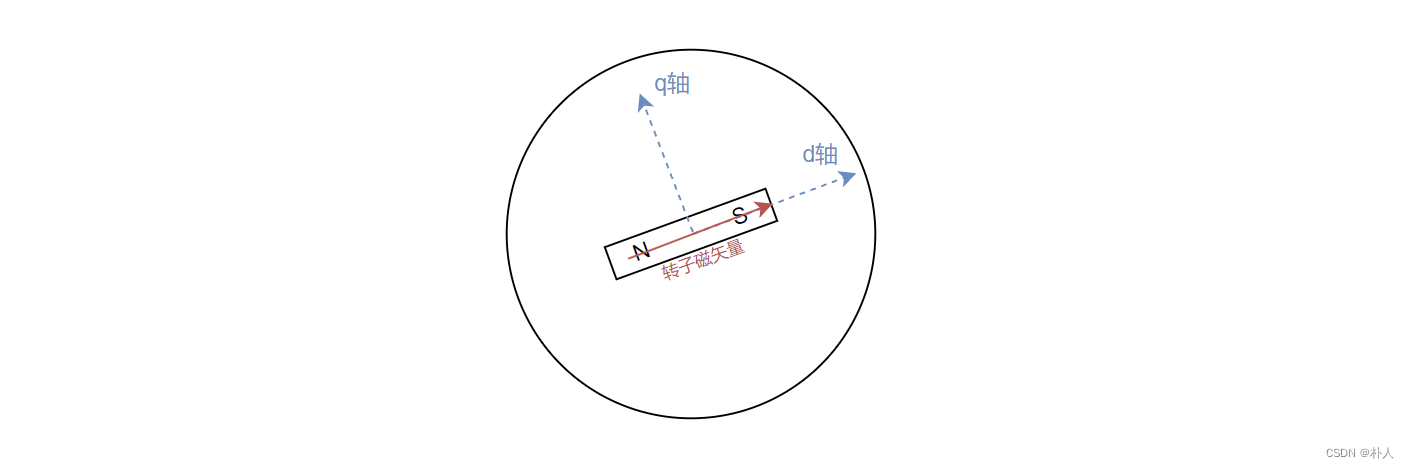
दोषाः : यतो हि q-अक्षः रोटरस्य स्थायीचुम्बकस्य चुम्बकीयसदिशात् ९० डिग्री भिन्नः भवति, अतः रोटरस्य वास्तविकसमयस्य स्थितिः (कोणः) ज्ञातव्यः
यतो हि रोटरस्य वास्तविकसमयस्थानं एन्कोडरेन सह प्राप्तुं सुलभं भवति, अधिकांशतया स्थितिं नियन्त्रयितुं pid इत्यस्य उपयोगः भवति ।
पृथक् स्थानस्य FOC नियन्त्रणखण्डचित्रं अधः दर्शितवत् भवति । चित्रस्य किं अर्थः अस्ति यत् लक्ष्यस्थानं निवेशयितुं, एन्कोडरेन गणितेन कोणेन सह अन्तरस्य गणनां कर्तुं, ततः केवलं रोटरस्य q-अक्षस्य तीव्रताम् नियन्त्रयितुं pid नियन्त्रकं निवेशयितुं, d-अक्षस्य तीव्रता प्रत्यक्षतया 0 इति सेट् भवति, तथा च अन्ततः dq-अक्षतीव्रता (0 ~1) पूर्वं व्युत्पन्नस्य SVPWM कार्ये निवेशः भवति, तथा च उत्पादनं uvw सेतुबाहुस्य pwm कर्तव्यचक्रं भवतिअत्र यत् द्रष्टव्यं तत् निवेशलक्ष्यस्थानं θ थेता_{इन्} इत्यत्र ।θइत्यस्मिन्रोटरकोणः अथवा एन्कोडरकोणः बहु-मोर्चा-कोणः वा भवितुम् अर्हति, यावत् प्रतिक्रियायाः सह सम्बद्धः भवति θ थेताθकेवलं समानः कोणः एव स्थापयतु।

D-अक्षः बलात् कर्षणः : १.
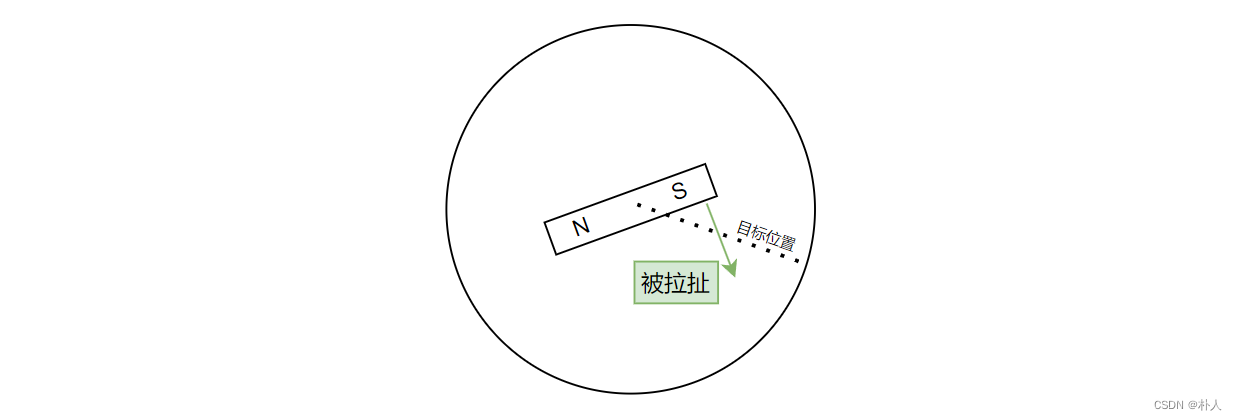
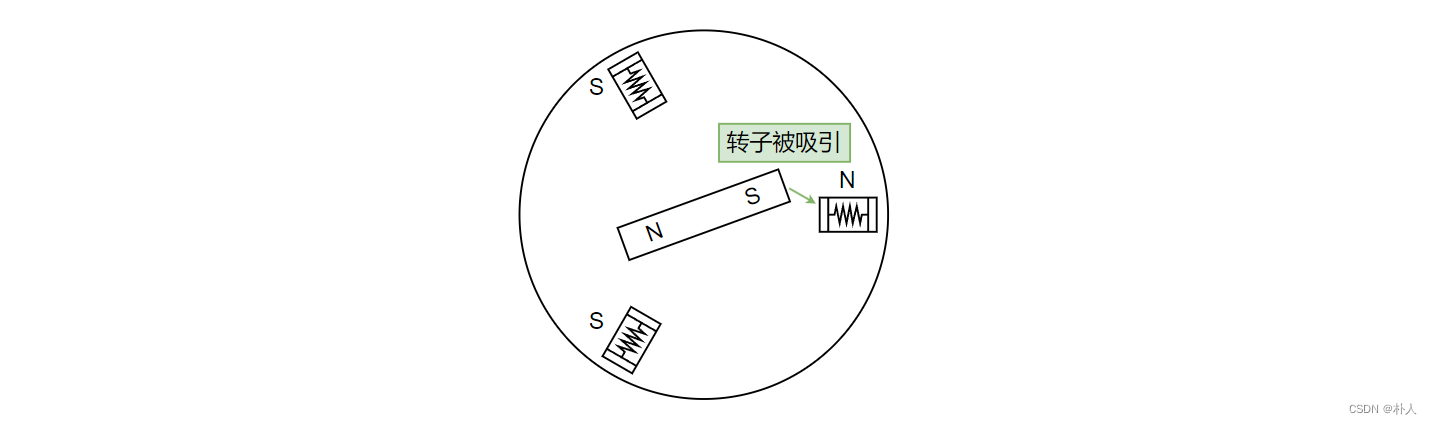
मूलविचारः अस्ति यत् लक्ष्यकुण्डलस्य चुम्बकीयसदिशं जनयितुं कुण्डलस्य कृत्रिमरूपेण नियन्त्रणं करणीयम्, तथा च स्थायीचुम्बकस्य d-अक्षः लक्ष्यस्थाने आकृष्टः भविष्यति ध्यानं कुर्वन्तु यत् एषा पद्धतिः d-अक्षं लक्ष्यस्थानं प्रति आकर्षयति ।
लाभाः : लक्ष्यस्थानं उत्पद्यते इति कारणतः रोटरकोणं ज्ञातुं आवश्यकता नास्ति, रोटरः स्वाभाविकतया तस्मिन् आकृष्टः भविष्यति ।
दोषाः : स्पर्शरेखाबलघटकः लघुः भवति, किञ्चित् स्पर्शरेखा बाह्यबलं च रोटरस्य स्पष्टतया स्थानात् बहिः गन्तुं शक्नोति
वेगनियन्त्रणार्थं d-अक्षकर्षणपद्धतेः उपयोगः न समीचीनः, यतः d-अक्षकर्षणस्य उद्देश्यं एन्कोडरदत्तांशं विना वेगस्य गणना कठिना भवति गतिनियन्त्रणं pid नियन्त्रणपद्धतिं उपयोक्तुं शक्नोति, परन्तु यतः मोटरभ्रमणस्य समये गतिमूल्यं तुल्यकालिकरूपेण अस्थिरं परिवर्तते, तथा च D नियन्त्रणं नियन्त्रितमापदण्डस्य परिवर्तनस्य आनुपातिकं भवति, अतः सामान्यतया केवलं PI नियन्त्रणस्य उपयोगः भवति
वेगस्य गणनाविधिः अतीव सरलः इत्यर्थः वर्तमान कोण − अन्तिम अभिलेखित कोण Δ t frac{वर्तमान कोण - अन्तिम अभिलेखित कोण}{डेल्टा{t}}Δतवर्तमान कोण−अन्तिमः अभिलेखितः कोणः。
लक्ष्यवेगस्य वास्तविकसमयवेगस्य च अन्तरं PI नियन्त्रणे निवेश्य गतिनियन्त्रणं प्राप्तुं शक्यते ।
व्यक्तिगतवेगस्य FOC नियन्त्रणखण्डचित्रं अधः दर्शितवत् अस्ति ।

मोटरस्य धारा टोर्क् इत्यस्य प्रतिनिधित्वं करोति । रोटरस्य बलस्य dq अक्षतः वियुग्मनस्य अनन्तरं ज्ञातुं शक्यते यत् केवलं q अक्षः एव मोटरस्य परिभ्रमणस्य योगदानं करोति, तथा च केवलं q अक्षः एव टोर्क् जनयति अतः केवलं q अक्षस्य धारायाः नियन्त्रणस्य आवश्यकता वर्तते मोटरस्य टोर्क् नियन्त्रयन्तु। यदि d-अक्षधारा अपि नियन्त्रितः भवति तर्हि मोटरधाराप्रयोगस्य दरं सुधरितुं शक्यते, तापजननं न्यूनीकर्तुं शक्यते, मोटरस्य अधिकतमं टोर्क् उत्पादनं च वर्धयितुं शक्यते
मोटरधारा प्राप्तुम् : १.
रोटर dq अक्षः एकः अमूर्तः अवधारणा अस्ति, यस्य उपयोगः रोटरबलस्य वियुग्मनस्य सुविधायै भवति dq अक्षधारा प्रत्यक्षतया ज्ञातुं न शक्यते यत् धारा प्रत्यक्षतया ज्ञातुं शक्यते The dq अक्षे current इत्यस्य गणना phase line current इत्यस्य आधारेण कर्तुं शक्यते ।
चरणरेखाधारापरिचयस्य अनेकाः उपायाः सन्ति : 1. धारापरिचयः उपरितनसेतुबाहुशक्तिनलिकानां मध्ये स्थाप्यते, यत् ऑनलाइनपरिचयः इति कथ्यते 2. वर्तमानपरिचयः निम्नबाहुस्य जीएनडी च मध्ये स्थापितः भवति, यत् निम्नपक्षीयपरिचयः इति कथ्यते ।
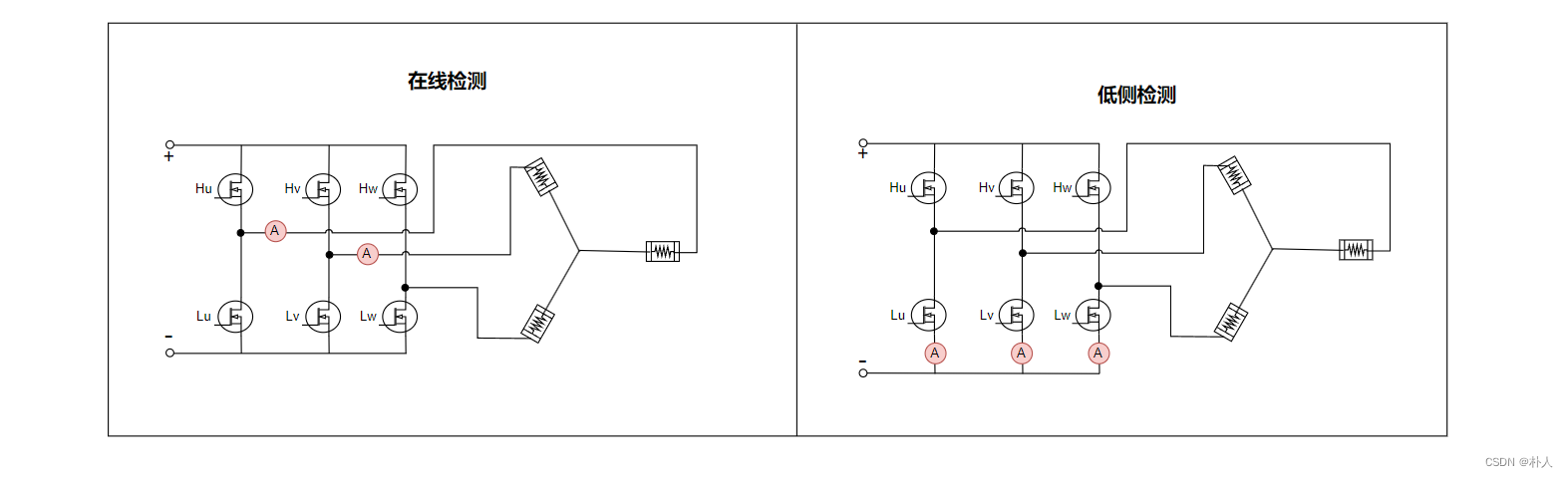
एकस्य नोडस्य कारणात्流出电流 流入电流=0 , अतः त्रिचरणरेखायाः कृते केवलं द्वौ वर्तमानपरिचय-एककौ आवश्यकौ भवतः । परन्तु निम्नपक्षीयपरिचयार्थं त्रीणि धारापरिचय-एककानि उपयोक्तुं सर्वोत्तमम्, यतः यदा कस्यचित् सेतुबाहुस्य pwm कर्तव्यचक्रं १ अथवा १ इत्यस्य समीपे भवति तदा अधः सेतुबाहुतः धारा न गमिष्यति अथवा धारा भविष्यति be unstable, and the three phase lines will only अवशिष्टं वर्तमानपरिचय-एककं सामान्यतया धारा-परिचय-एककाः भवितुं शक्नोति ततः परं त्रयः अपि धारा-परिचय-एककाः कर्तव्यानुसारं चयनं कर्तुं शक्यन्ते चक्रं, अपरं च धाराणां योगं ० इति कल्पयित्वा गण्यते । ऑनलाइन-परिचयस्य एषा समस्या नास्ति, यतः अधः सेतुबाहुः पिहितः वा न वा, चरणरेखायाः माध्यमेन सर्वदा प्रवाहः प्रवहति यतो हि ऑनलाइन-परिचयस्थाने वोल्टेजः तुल्यकालिकरूपेण बृहत् भवति, अतः ऑनलाइन-परिचयस्य कृते वर्तमान-परिचय-एककस्य बृहत्-वोल्टेजं सहितुं समर्थः भवितुम् आवश्यकः, तुल्यकालिकरूपेण महत् च भवति
त्रयः चरणरेखाधाराः प्राप्त्वा तदनन्तरं तान् dq-अक्षधारासु परिवर्तनस्य उपायं ज्ञातव्यम् ।चरणरेखाधारा dq अक्षे प्रक्षेपणं कर्तुं शक्यते, येन dq अक्षधारा प्रत्यक्षतया प्राप्तुं शक्यते तथापि वर्तमानस्य मुख्यधाराविधिः प्रथमं dq अक्षस्य उपरि प्रक्षेपणं करणीयम् α अल्फाαअक्षः च β बीटाβअक्ष (एतत् सोपानं क्लार्क परिवर्तनम् इति उच्यते), ततः च α अल्फाαअक्षः च β बीटाβअक्षधारा dq अक्षे प्रक्षेप्यते (एतत् पदं पार्करूपान्तरणम् इति कथ्यते), यतः अधिक उन्नतस्थाने संवेदकरहित FOC इत्यत्र तस्य उपयोगः भविष्यति α अल्फाαअक्षः च β बीटाβअक्षधारा ।
क्लार्क परिवर्तनम् : १.
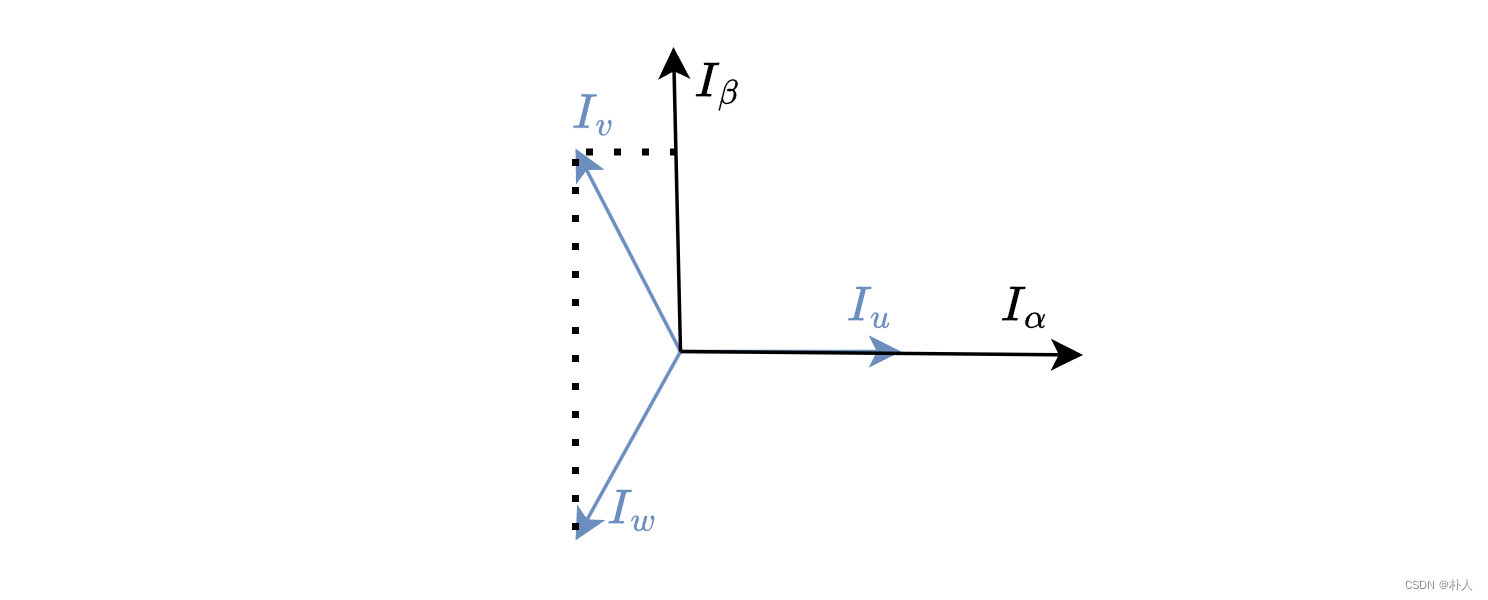
त्रिचरणधारा अहं उ , अहं व , अहं व अहं_उ,अहं_व,अहं_वअहम्उ,अहम्वि,अहम्wपरियोजना को I α , I β I_alpha,I_betaअहम्α,अहम्βयथा अधोलिखिते चित्रे ज्यामितीयसम्बन्धात् दृश्यते, प्रक्षेपणव्यञ्जनम् अस्ति : १.
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 °{अहम्α=अहम्उ−अहम्वि∗कोस्60उपाधि−अहम्w∗कोस्60उपाधिअहम्β=अहम्वि∗कोस्30उपाधि−अहम्w∗कोस्30उपाधि
{अहम्α=अहम्उ−अहम्वि∗कोस्60°−अहम्w∗कोस्60°अहम्β=अहम्वि∗कोस्30°−अहम्w∗कोस्30°
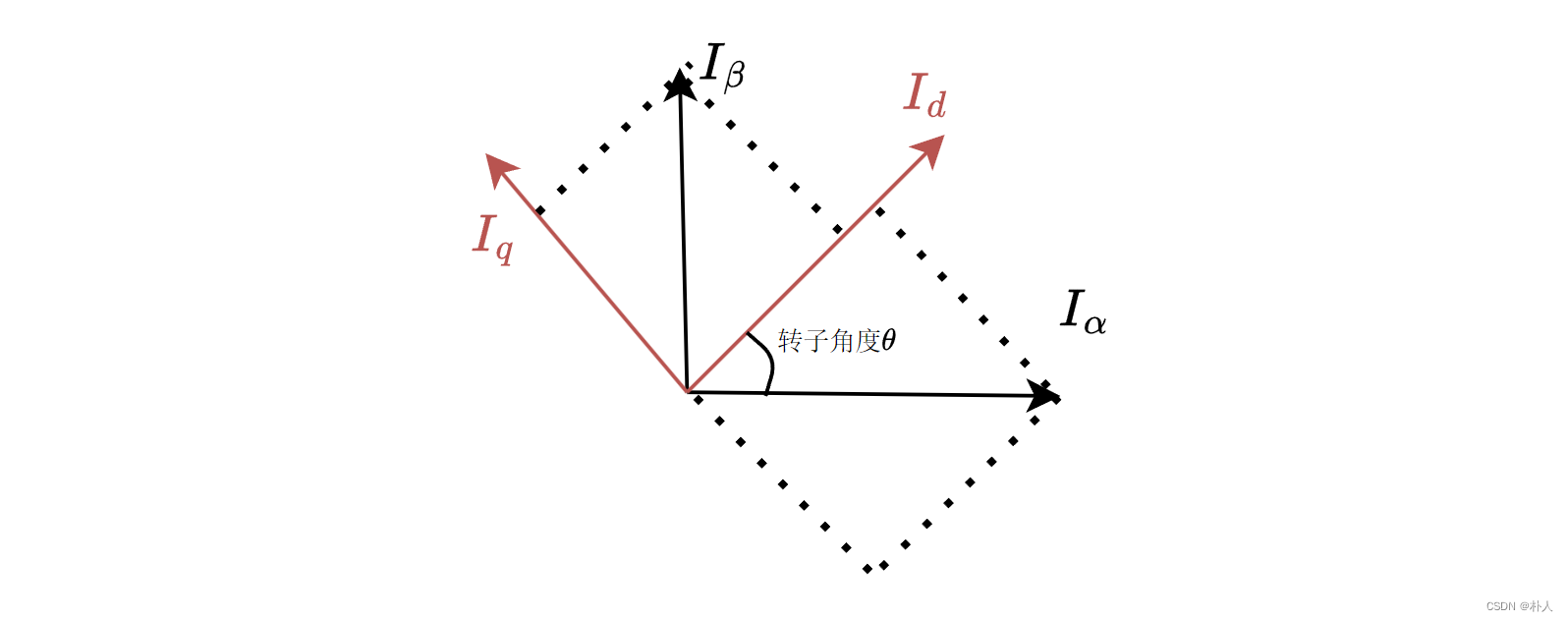
उद्यान परिवर्तनम् : १.
भविष्यति I α , I β I_alpha,I_betaअहम्α,अहम्βअक्षः dq अक्षं प्रति प्रक्षेपितः भवति (वास्तवतः परिभ्रमणमात्रिकायाः गुणितः यथा अधोलिखिते आकृतौ ज्यामितीयसम्बन्धात् दृश्यते, प्रक्षेपणव्यञ्जनम् अस्ति :
{ I d = I α ∗ cos θ I β ∗ sin θ I q = − I α ∗ sin θ I β ∗ cos θ{अहम्घ=अहम्α∗कोस्θ अहम्β∗पापम्θअहम्q=−अहम्α∗पापम्θ अहम्β∗कोस्θ
{अहम्घ=अहम्α∗कोस्θ अहम्β∗पापम्θअहम्q=−अहम्α∗पापम्θ अहम्β∗कोस्θ
एकस्य धारायाः FOC नियन्त्रणचार्टः अधः दर्शितवत् भवति यतः वर्तमानपरिवर्तनं तुल्यकालिकरूपेण अस्थिरं भवति, नियन्त्रितमापदण्डस्य परिवर्तनवेगेन सह सम्बद्धं D नियन्त्रणं प्रायः अत्र न उपयुज्यते, केवलं PI नियन्त्रणस्य उपयोगः भवति

यदि एतादृशी आवश्यकता अस्ति: स्थितिं नियन्त्रयन्, मोटरस्य स्थानं प्रत्यागत्य अधिकतमं गतिं अधिकतमं धारा च निर्दिशतु अथवा गतिं नियन्त्रयन्, यदा मोटरः लक्ष्यवेगं प्राप्नोति तदा अधिकतमं धारा निर्दिशतु, तर्हि भवद्भिः उपयोगः करणीयः स्थिति-वेग-वर्तमान-स्ट्रिंग-स्तर-नियन्त्रणम् । अत्र झरनानियन्त्रणं मोटरं निश्चितं धारामूल्यं वा गतिमूल्यं वा प्राप्तुं न नियन्त्रयति, परन्तु नियन्त्रणप्रक्रियायाः समये मोटरस्य अधिकतमधारामूल्यं वा अधिकतमवेगमूल्यं वा प्राप्तुं आवश्यकं भवति, यतः मोटरस्य एकस्मिन् स्थाने स्थापयितुं असम्भवम् वेगः अस्ति वा प्रवाहः अस्ति वा।
कैस्केड नियन्त्रणस्य अर्थः अस्ति यत् वर्तमाननियन्त्रणपाशस्य निवेशः पूर्वनियन्त्रणपाशस्य निर्गमः भवति कैस्केडस्थाननियन्त्रणं उदाहरणरूपेण गृहीत्वा नियन्त्रणखण्डचित्रम् अस्ति ।

सैद्धान्तिकः भागः अधुना समाप्तः अस्ति तथा च वयं SVPWM इत्यस्य गणनाविधिं प्राप्तवन्तः तथा च वयं FOC कोडं लिखितुं शक्नुमः तथापि व्यवहारे वयं विविधाः समस्याः प्राप्नुमः pwm कर्तव्यम् FOC नियन्त्रणं आद्यतः एव।

सः ३० वर्षाणाम् अधिकं कालात् प्रौद्योगिक्याः शोधार्थं समर्पितः अस्ति, तथा च जावा, लिनक्स, जावास्क्रिप्ट्, php, css इत्यादिषु विविधभाषासु प्रवीणः अस्ति, मुक्तस्रोतक्षेत्रे सः बहु योगदानं कृतवान् अस्ति developer documentation station भविष्ये सन्दर्भार्थं प्रौद्योगिकीविकासे केचन विषयाः साझां कर्तुं सर्वे तत् पश्यन्तु
