2024-07-11
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Pars prior per derivationem SVPWM facultatem moderandi omnem vim in rotor motore obtinuimus. In hac sectione eligimus formam SVPWM rotoris dq-axis decouptionis in sectione praecedente consecutam vim rotoris rationabiliter moderari et ultimum metam FOC imperium motoris consequi ac consequi: situm, celeritatem et imperium currentem.
Homines qui hanc sectionem legunt verisimile maxime intelligunt PID (Proportionalem proportionalem, integralem integralem, differentialem derivativam) potestatem, quae etiam facultate mea limitata est.
Utrum situs, celeritas vel currens motoris sit, omnes parametri moderati haberi possunt.
Ex prospectu intuitivo, cum verus-tempus valor parametri moderati minor est quam scopum valoris, applicanda est vis externa ad modulum moderatum augendum. Si vis externa applicata nimis magna est, parameter moderatus LUXURIA erit, faciens oscillationem amplitudinis moduli moderati prope valorem scopum ut maior et maior fiat; nimis tardius. Necessarium est igitur vim externam idoneam obtinere, ut parametri moderatae magis ac vehementius oscillant, nec celeritas temperatio tardior erit. Ex hac intuitiva potestate notio est P in PID. Quando simpliciter utens P potestate, pone vim externam = differentiam inter modulum moderatum et scopum valoris P coefficientis. Si coefficiens P relative parva posita est, quamvis modulus moderatus omni tempore oscillare non potest et ad valorem scopum lente stabilire potest, celeritas commensuratio nimis tarda est Imperium parametri originaliter oscillare.
Cogitemus de D potestate ab intuitiva prospectu. Cum modulus moderatus accesserit vel transit scopum valorem sub puro P potestate, vis correctio in contrariam partem celeritati adiuvat modulum continentem prope valorem scopo fregit, modulo moderato permittens. fregit. Haec correctio vis in contrariam partem celeritatis est d temperantia. His additis D imperium, moderatio vis externae magnitudinis = differentia inter modulum moderatum et scopum valorem * P coefficientem moderatum velocitatis parametri * D coefficientis. Cum pura D potestate usus, cum celeritas moduli moderati in statu primo 0 sit, modulus moderatus vim externam non recipiet. Etiam videri potest P imperium vim externam praebet et D imperium vim externam coarctat. Si coefficiens D nimis magna eligitur, levis celeritas vim externam ingentem causare potest; si D coefficiens nimis exiguus eligitur, non satis erit vim externam productionis moderaminis coercere, et parametri moderatae tarda erunt ad stabilire.
Cogitemus de me temperare ab intuitiva parte modulus moderatus et scopo valor temporis. Haec mechanismus est ego imperium. His additis I control, moderatio vis externae quantitatis = differentia inter modulum moderatum et scopum valorem coefficiens * P, celeritas moduli moderati coefficientis * D, differentia inter modulum moderatum et scopo valorem accumulat per tempus * I coefficiens.
Cum motore moderante, sine specialibus circumstantiis, cum d-axis ad rotationem motoris non conferat, pid imperium non potest nisi vim axis q-axis regere, et d-axis vel output coerceri potest. recta ad 0 profectus est.
Celeritas moderatio et imperium vena, sampling diligentiam et frequentiam limitatum, celeritas et vena instabiles sunt ac cito mutant Si talis valor directe adhibetur, PID output valde fluctuare faciet.

Pictura infra ostendit, postquam eliquare, propius esse ad verum valorem; Multi modi eliquandi sunt, ut eliquare et Kalman eliquare humilem. Essentia est aestimare valorem proximum valorem realem in notitia strepitu mixto. Cum eliquare permagnum est argumentum, principium in hac sectione explicari non potest. Directe potes videre codicem in parte practica subsequente
Multi modi eliquandi sunt, ut eliquare et Kalman eliquare humilem. Essentia est aestimare valorem proximum valorem realem in notitia strepitu mixto. Cum eliquare permagnum est argumentum, principium in hac sectione explicari non potest. Directe potes videre codicem in parte practica subsequente
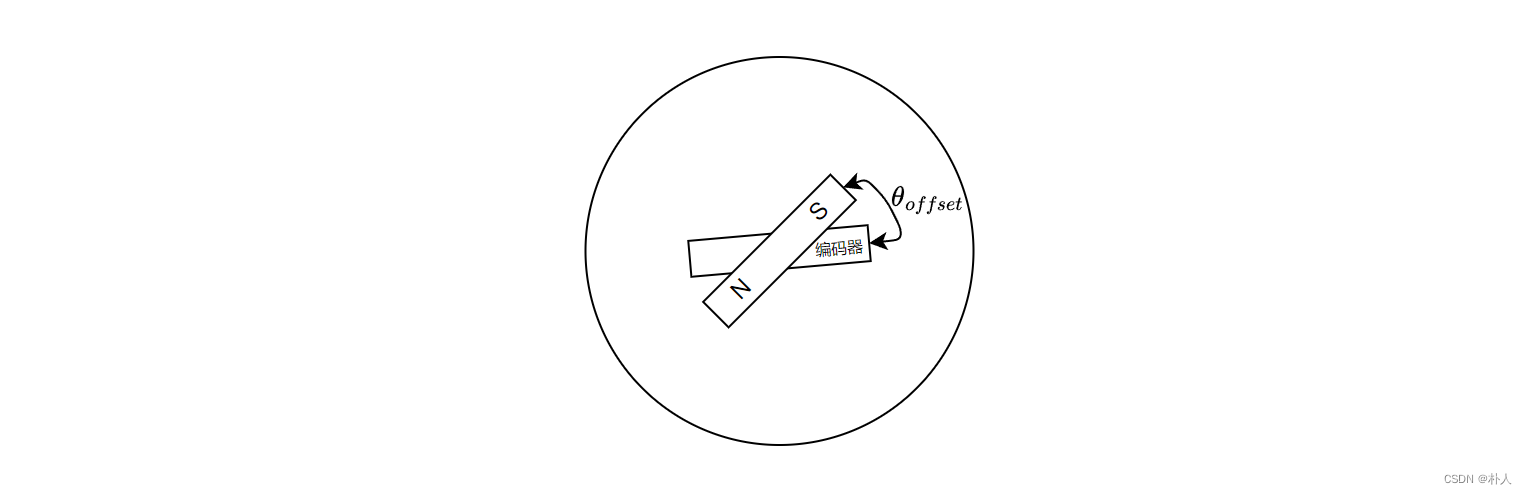
Positio refertur ad angulum. Motor encoder in habitationi rotoris instituitur, ergo encoder angulum habitationis rotoris obtinet, et rotor intus sita est . Cum insertis, encoder Nullus gradus machinae prorsus esse potest contra magnetem rotorem permanentem. Angulus encoder ab encoder providetur, et angulus rotor sciri etiam potest. Quomodo hanc fixam cinguli obtineat, in subsequenti parte practica dicetur. Vector magneticus proveniens agit in magnete rotore permanenti, ergo ratio theorica in angulo rotoris fundatur.
Duae sunt modi po- ditionis rotor assequi;
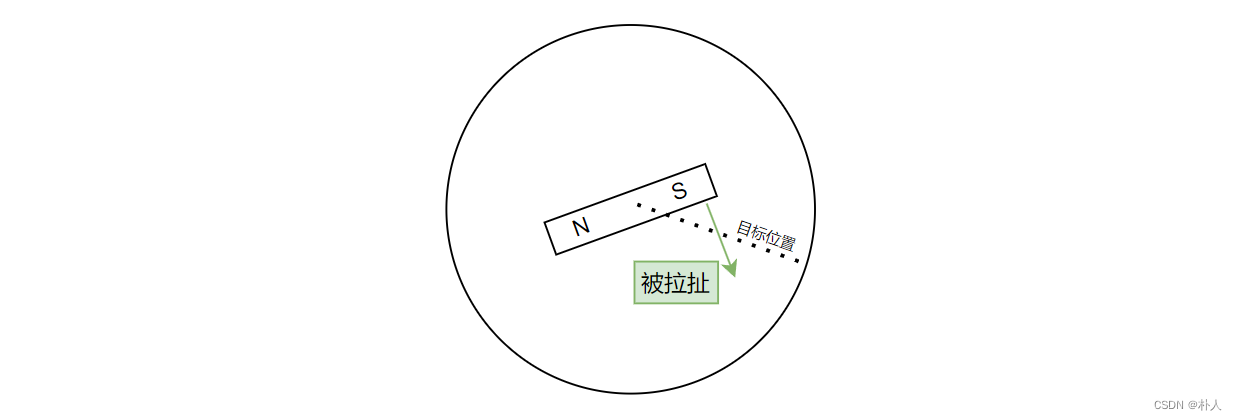
pid modum:
Idea intuitiva est uti q-axis rotoris ad continue trahere rotorem sinistrum et dextrum vis trahens et rotor ad scopum redit.
Commoda: Q-axis maiorem vim praebere potest, et positio dominii velocior et potentior est.
Incommoda: Cum q-axis 90 gradus sit diversus a vectore magnetico rotoris magnetis permanentis, notum debet esse positio reali temporis (anguli) rotoris.
Cum positio realis temporis rotoris facile obtinet cum encoder, pid locum in pluribus temperare adhibetur.
FOC imperium obstructionum schematis separati loci ut infra ostendetur. Quid significat pictura positionem scopum inponere, differentiam cum angulo ab encoder computare, tum inponere pid moderatorem ad solum intensionem rotoris q-axis moderari, intensio d-axis directe ad 0 adponitur, et tandem dq-axis intensio (0~1) initus est in functionem SVPWM antea desumptam, et output est pwm officium cycli pontis brachii.Quid hic notandum est positio scopum initus θ in theta_{in}θinPotest esse angulus rotor vel angulus encoder vel multi-verti angulus, dummodo ad opiniones referatur θ thetaθEundem angulum servant maxume.

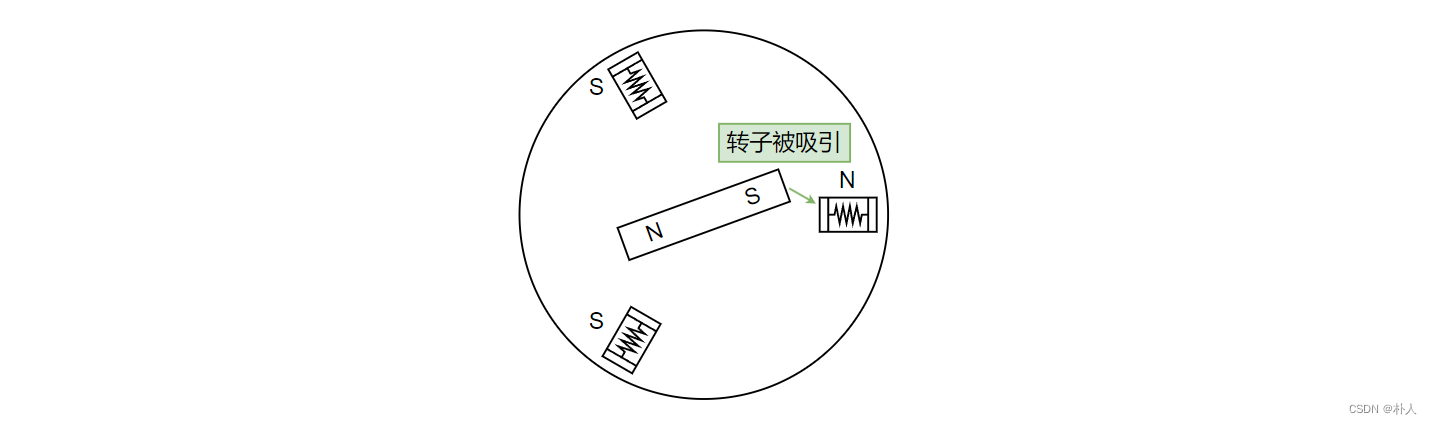
d-axis trahere coactus;
Core idea est artificiose cohibere coilum ad scopum coilum magneticum vectorem generare, et d-axis magnetis permanentis ad locum scopum attrahitur. Nota hunc modum axioma d-axem trahere ad positionem scopo.
Commoda: Cum situs target generatur, non oportet cognoscere angulum rotor, naturaliter rotor attrahitur ad ipsum.
Incommoda: Vis tangentialis componentis parva est, et vis externa tangentialis levis rotor ut patet ex situ movere potest.
Non convenit uti modum d-axis trahere velocitatis imperium, quia propositum trahere axi encoder uti non est. Celeritas control methodo pid potestate uti potest, sed quia celeritas valoris secundum motum mobilem instabilem mutat, et D imperium proportionale est mutationi moduli moderati, ideo vulgo solum PI imperium adhibetur.
Methodus celeritatis calculi valde simplex est, id est Current angulus − Ultimus notatus angulus Δ t frac{ angulus Current - Ultimus notatus angulus{Delta{t}}Δtcurrent angulus−Novissime memoriae angulus。
Celeritas imperium obtineri potest inponendo differentiam inter celeritatem scopum et celeritatem realem temporis in PI potestate.
FOC imperium obstructionum figurae singularum celeritatum ut infra ostendetur.

Currentis motoris torquem repraesentat. Postquam vis rotoris ex axe dq decoquatur, inveniri potest quod solum q axem ad rotationem motoris conferat, solumque q axis generat torquem motricium control torque. Si currens quoque d-axis moderatur, utens rate motoris currentis emendari potest, generatio calor minui potest, maximusque torques motoris output augeri potest.
Ut motor current:
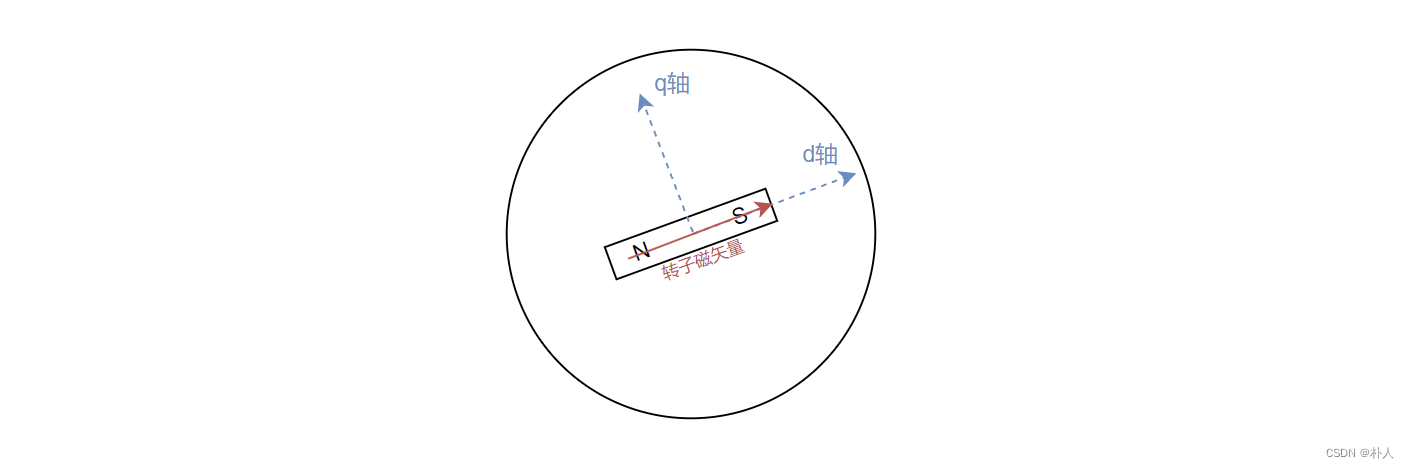
Axis rotor dq est conceptus abstractus, qui faciliore adhibetur ad decoctionem vis rotoris vena computari potest secundum tempus in linea currente.
Plures modi ad detegendam periodum rectae venae sunt. Duae rationes maxime communes sunt: 1. Current detectio inter superiorem et inferiorem pontem brachii potentiae fistulae ponitur, quae detectio online appellatur. 2. Praesens detectio ponitur inter bracchium inferius et GND, quod latus deprehensio humilitatis appellatur.
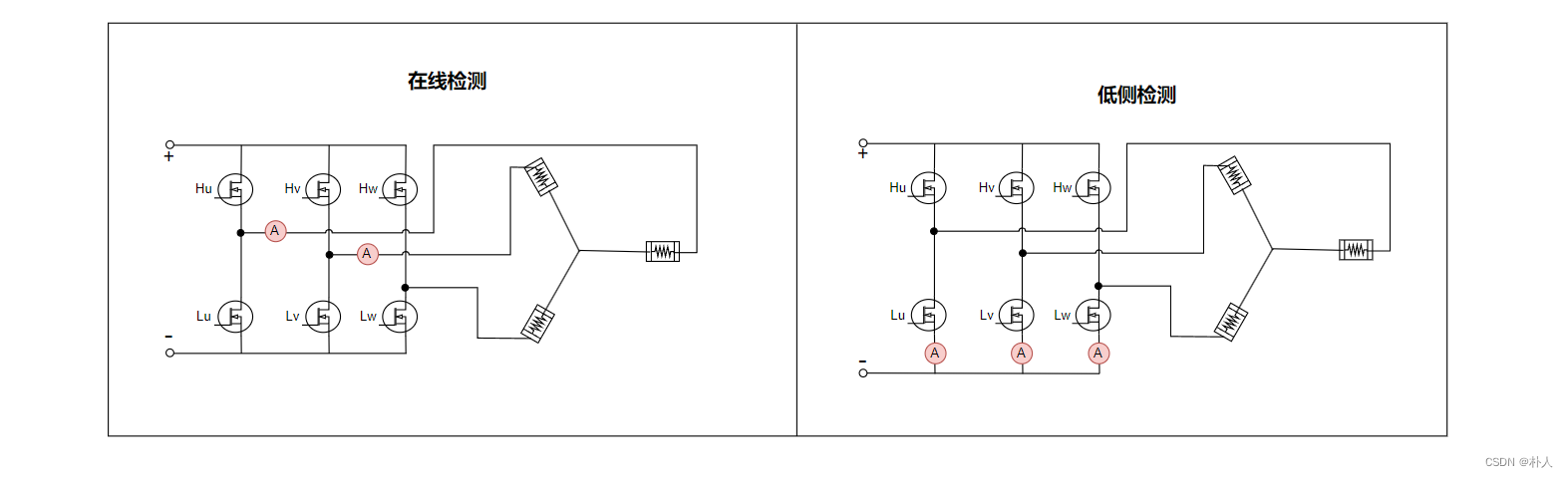
debitum ad nodi流出电流 流入电流=0 , ideo solum duae deprehensiones venae ad tres periodos lineae requiruntur. Optimum tamen est tres unitates detectionis currentis ad latus deprehensionem humilem adhibendum, quia cum cyclus brachii cuiusdam pontis officium pwm sit 1 vel prope ad 1, nulla vena transiens per brachium pontis inferiorem vel currentem voluntatem. Inconstans erit, et tres periodi lineae solae reliquiae detectae unitatis current normaliter colligere possunt cycli, alter vero computatur, si summa excursus 0 est. Deprehensio Online hoc problema non habet, quia nulla materia utrum pons brachii inferior claudatur vel non, semper vena per lineam Phase fluit. Cum in intentione deprehensio in online situs est relative magna, deprehensio hodierna unitas pro online detectione eget ut magnam intentionem et relative pretiosam sustinere possit.
Post tres periodi lineas obtinendas, deinde viam invenias ut eas in dq-axis excursus convertas.Phase recta currentis in axem dq projici potest, ita ut axi currenti dq directe obtineri possit. Attamen hodierna methodus amet in primum axem dq projiciendum est in onto α alphaαAxis et β betaβaxis (hic gradus transformatio Clark appellatur), ac deinde α alphaαAxis et β betaβAxis currentis in axem dq projicitur (hic gradus transformatio parcum appellatur), quia adhibebitur in positione provectiore sensori FOC. α alphaαAxis et β betaβaxis current.
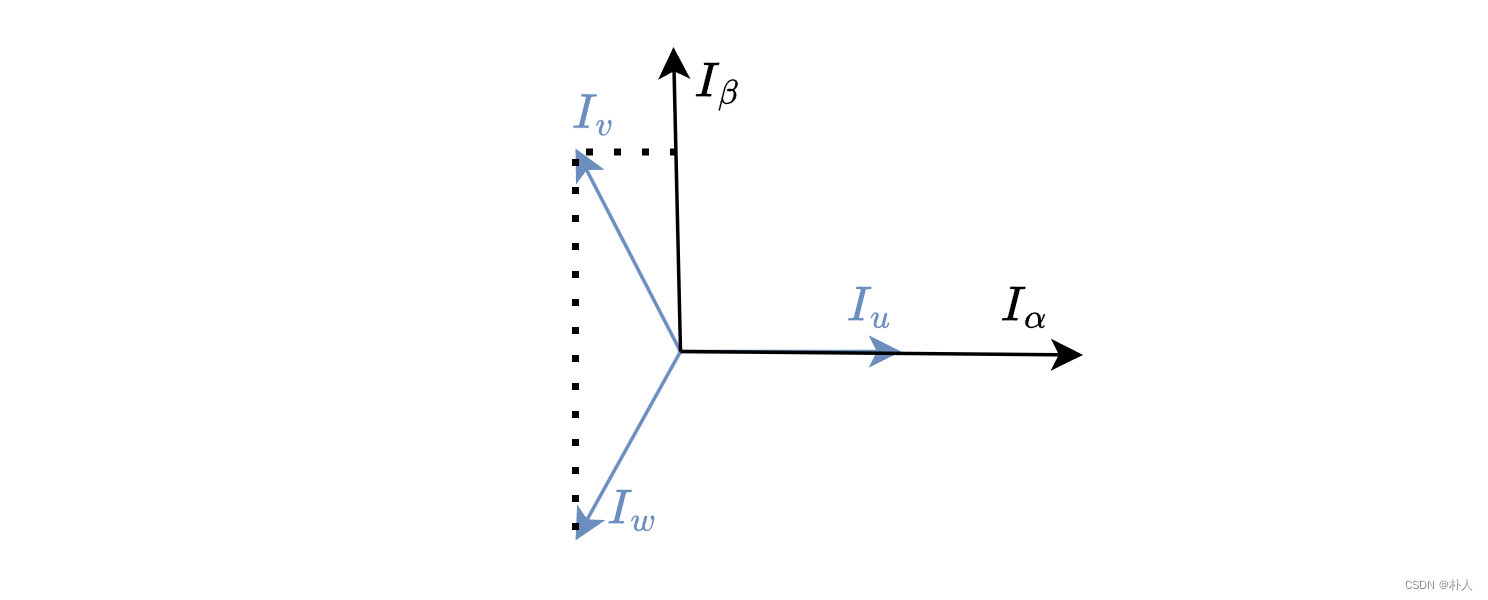
Clark transmutatio;
Tres tempus current I u , I v , w I_u , I_v , I_wegou***,egov,egow*****Project to ego α , β I_alpha, I_betaegoα,egoβProiectio est expressio, sicut patet ex habitudine geometrica in figura infra;
{ I α = I u V ∗ cos 6 0 ° I w cos 6 0 ° I β = I v ∗ cos 3 0 ° I w cos 3 0 °{egoα=egou***−egov∗cos60gradus−egow*****∗cos60gradusegoβ=egov∗cos30gradus−egow*****∗cos30gradus
{egoα=egou***−egov∗cos60°−egow*****∗cos60°egoβ=egov∗cos30°−egow*****∗cos30°
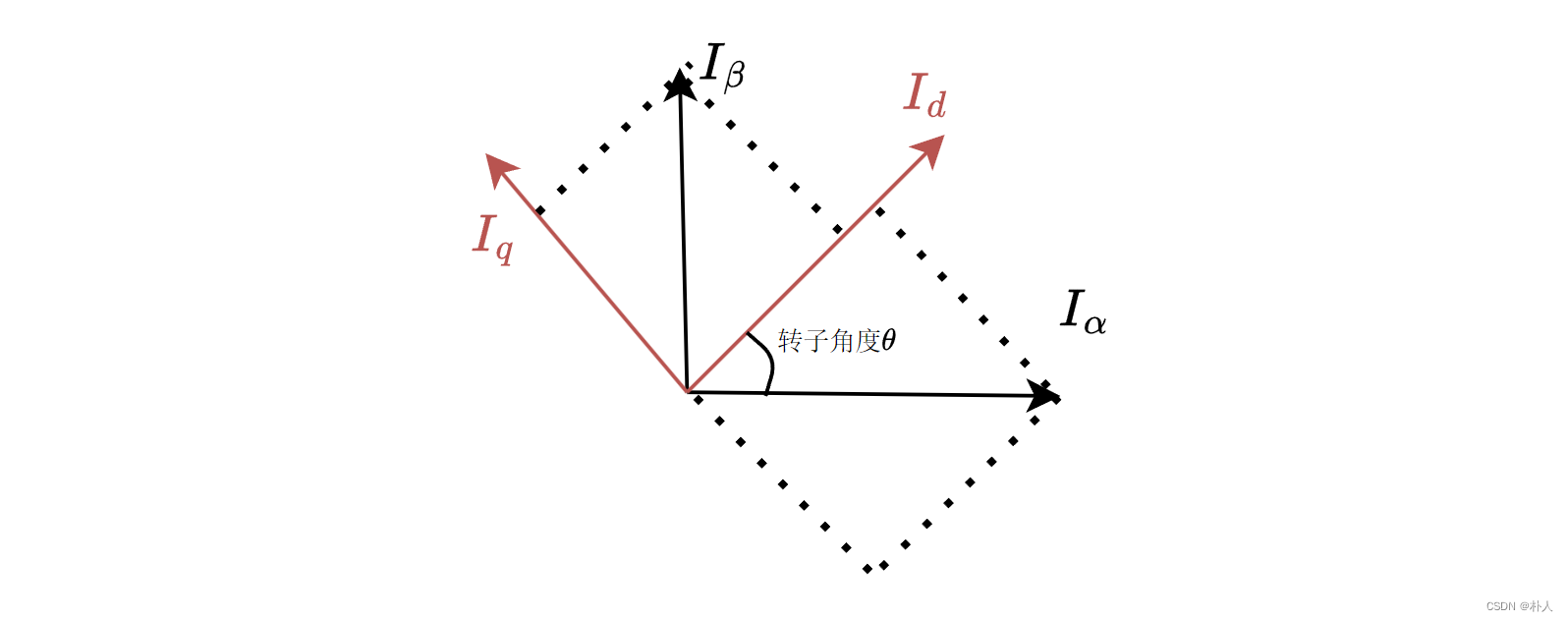
parcum transmutatio;
Will ego α , β I_alpha, I_betaegoα,egoβAxis projicitur ad axem dq (a matrice rotatione reapse multiplicatum).
{ I d = Ego α cos θ I β sin θ I q = − ego α sin θ I β cos θ{egod**=egoα∗cosθ egoβ∗peccatumθegoq**=−egoα∗peccatumθ egoβ∗cosθ
{egod**=egoα∗cosθ egoβ∗peccatumθegoq**=−egoα∗peccatumθ egoβ∗cosθ
FOC chartula unius monetae imperium infra ostendetur. Cum mutatio hodierna relative instabilis sit, D imperium ad mutationem celeritatis parametri continentis referri solet, hic non adhibetur, solum PI imperium adhibetur.

Si talis exigentia est: cum regere locum positio-celeritate current filum gradu imperium. Cascades imperium hic non moderatur ut motorem quendam attingat valorem currentem vel celeritatis valorem, sed motorem maximum requirit ut valorem vel maximum momentum in processu moderandi attingat, quia impossibile est motorem in uno loco ponere. Est velocitas vel cursus.
Cascade imperium significat quod initus imperii ansa hodiernae est output ansa praecedente potestate.

Pars theorica nunc est. SVPWM calculi methodum ac potestatem processus positionis, velocitatis et currentis obtinuimus. Scribere FOC codicem possumus Pwm officium. FOC imperium de integro.

technologiae technologiae plus quam 30 annos operam dedit et in variis linguis proficit ut java, linux, javascript, php, css, etc. Multas contributiones in aperto fonte campo fecit elit documentorum statione ad communicandas quaestiones technologiarum progressus ad futuram referentiam.
