2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Table des matières
1.1 Informations sur l'environnement logiciel et matériel
1.2 Informations sur la carte de développement
1.3 Informations sur le débogueur
2.1 Circuit d'interface matérielle
2.2 FSB configure les IO du DS18B20
2.3 Générer les fichiers du projet Keil
3.2 Implémentation du pilote DS18B20
3.2.1 Définition de l'état des E/S
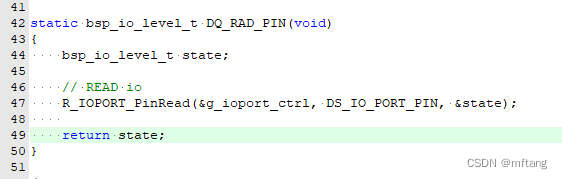
3.2.2 Fonction de lecture de l'état des E/S
Renesas R7FA8D1BH (Cortex®-M85) contrôle DS18B20 et ADC pour réaliser la fonction de saut de deux pages
Cet article présente principalement un cas d'application complet conçu pour Renesas R7FA8D1BH (Cortex®-M85) : application des E/S du R7FA8D1BH pour implémenter un protocole de bus unique et réalisation de la fonction de pilotage du ds18b20. Il complète principalement la lecture de la valeur de température et le formatage de la valeur. Affichage sur l'OLED sur l'écran. Les données de température sont également envoyées au terminal du port série via le terminal du port série.
| Informations sur les logiciels et le matériel | Information sur la version |
|---|---|
| Microcontrôleur Renesas | R7FA8D1BH |
| Keil | MDK ARM 5.38 |
| Version FSP | 5.3.0 |
| Outil de débogage : N32G45XVL-STB | LIEN DAP |
L'auteur a choisi d'utiliser la carte de développement Wildfire Yaoyang_Renesas RA8. Le MCU de contrôle principal de cette carte est R7FA8D1BHECBD, et le cœur de 7FA8D1BHECBD est ARM Contex-M85.
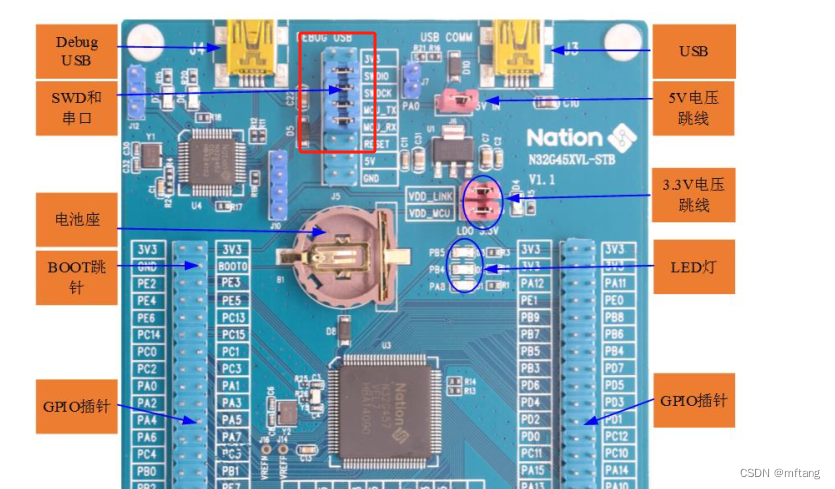
Pour la puce R7FA8D1BHECBD, le cœur utilisé est Cortex®-M85 Core, ST-LINK-V2 ou J-LINK-V9 ne prend pas en charge les fonctions de téléchargement et de débogage.Après de nombreuses tentatives, l'auteur a découvert queDécodeur N32G45XVLLe DAP-LINK fourni avec la carte peut télécharger et déboguer R7FA8D1BHECBD.
L'image ci-dessous est une image physique de la carte de développement N32G45XVL-STB :
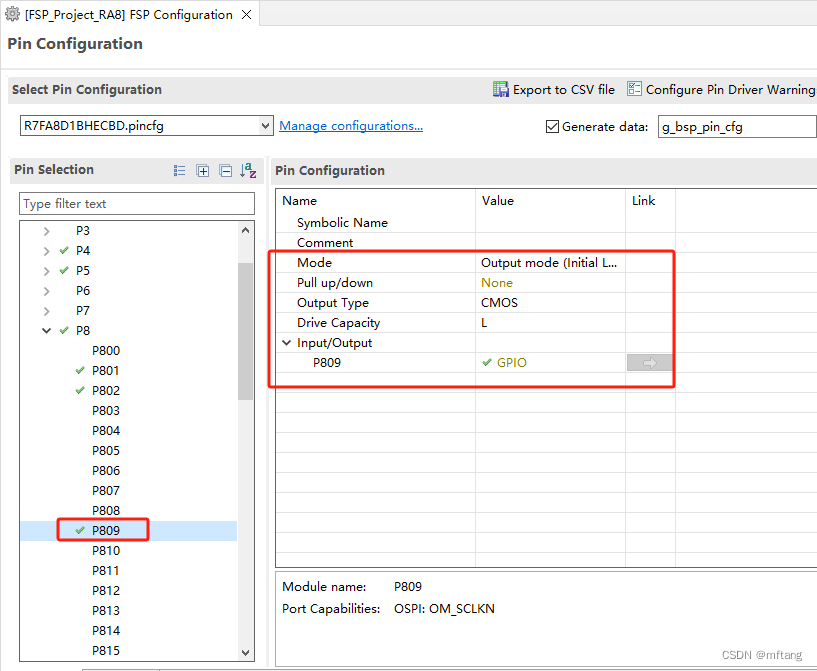
Le circuit d'interface du DS18B20 a été conçu sur la carte de développement Yaoyang_Renesas RA8, qui utilise l'interface P809 comme signal de contrôle DQ du DS18B20.

Configurez P809 comme interface IO commune, puis configurez dynamiquement la sortie ou l'état de sortie de l'IO dans le code
Après avoir terminé la configuration des paramètres de FSP, vous pouvez générer un projet. Ouvrez le fichier projet, sa structure est la suivante :

Créez le fichier ds18b20.c pour implémenter le code du pilote
L'auteur a déjà analysé en détail le timing et la logique de mise en œuvre du DS18B20 dans son article précédent, je ne le présenterai donc pas ici.
DS18B20 Application Note_Waveform de ds18b20 lisant des données-CSDN Blog
Ligne 14 du code : Définissez la fonction step delay
Ligne 15 du code : Définir la fonction de retard de pas en ms
Ligne 18 du code : Définir le code PIN IO du DS18B20
Ligne 21 du code : configuration du port d'entrée
Ligne 22 du code : configuration du port de sortie
Ligne 24 du code : définir le niveau bas d'E/S
Ligne 25 du code : définir le niveau élevé d'IO

Ligne 47 de code : Lire l'état des IO en mode entrée
Fonction : ds18b20Init, détecte si DS18B20 est en ligne
Fonction : ds18b20BlockModeProcess. Lire la valeur du DS18B20
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
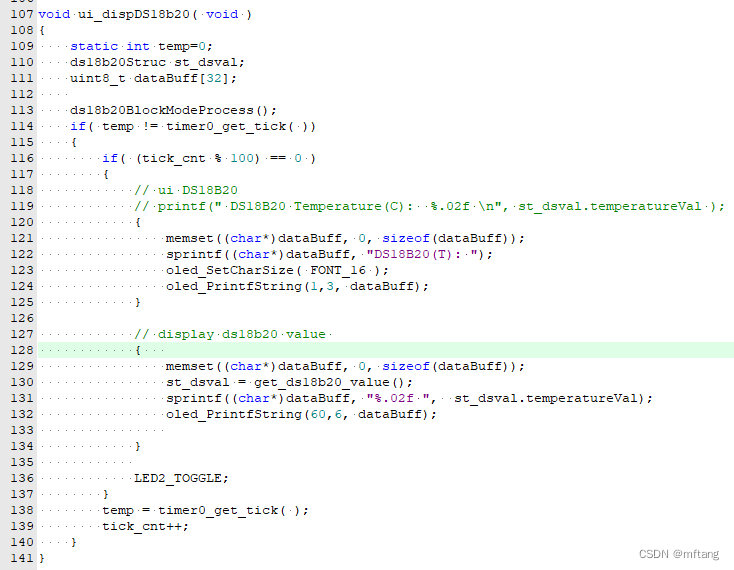
Ligne 113 du code : Lire la valeur de ds18b20
Ligne 130 du code : Obtenir les données de résultat de ds18b20
Ligne 131 du code : données d'affichage formatées
Ligne 132 de code : Afficher les données sur OLED
Compilez le code et téléchargez le code sur le tableau. Les résultats d'exécution sont les suivants :

Code du pilote DS18B20
1) Créez le fichier ds18b20.c et écrivez le code suivant
- /*
- FILE NAME : ds18b20.c
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #include "ds18b20.h"
- #include "hal_data.h"
-
- typedef enum{
- INPUT = 0,
- OUTPUT = 1,
- }IO_TYPE;
-
- typedef enum{
- FALSE = 0,
- TRUE = 1,
- }RETURN_RESULT;
-
- typedef enum{
- INIT_DQ = 0,
- WAIT_READY,
- SKIDROM_CMD,
-
- WAIT_CONVERT,
- RESET_CMD,
- READ_CMD,
-
- WAIT_DATA_READY,
- GET_VALUE,
- IDLE_NULL
- }RUN_STATE;
-
- ds18b20Struc st_ds1b20val;
-
-
- ds18b20Struc get_ds18b20_value( void )
- {
- return st_ds1b20val;
- }
-
- static bsp_io_level_t DQ_RAD_PIN(void)
- {
- bsp_io_level_t state;
-
- // READ io
- R_IOPORT_PinRead(&g_ioport_ctrl, DS_IO_PORT_PIN, &state);
-
- return state;
- }
-
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
-
-
-
- /* End of this file */
2) Créez le fichier ds18b20.h et écrivez le code suivant
- /*
- FILE NAME : ds18b20.h
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #ifndef DS18B20_H
- #define DS18B20_H
- #include "hal_data.h"
-
-
- #define WAIT_CNT_CONVERT 500
-
- #define timeDelayUS(us) R_BSP_SoftwareDelay(us, BSP_DELAY_UNITS_MICROSECONDS);
- #define DS_DELAY_MS(ms) R_BSP_SoftwareDelay(ms, BSP_DELAY_UNITS_MILLISECONDS);
-
-
- #define DS_IO_PORT_PIN BSP_IO_PORT_08_PIN_09
-
-
- #define DS_Mode_IN_PUT() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_INPUT)
- #define DS_Mode_Out_PP() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_OUTPUT)
-
- #define DQ_SET_LOW R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_LOW)
- #define DQ_SET_HIGH R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_HIGH)
-
-
- typedef struct{
- float temperatureVal;
- bool sign;
- }ds18b20Struc;
-
- uint8_t ds18b20BlockModeProcess( void );
- ds18b20Struc get_ds18b20_value( void );
-
-
- #endif /* DS18B20_H */
-
-

Il se consacre à la recherche technologique depuis plus de 30 ans et maîtrise divers langages tels que java, linux, javascript, php, css, etc. Il a apporté de nombreuses contributions dans le domaine de l'open source. station de documentation pour les développeurs pour partager certains problèmes de développement technologique pour référence future.

