
τα στοιχεία επικοινωνίας μου
Ταχυδρομείο[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Πίνακας περιεχομένων
1.1 Πληροφορίες περιβάλλοντος λογισμικού και υλικού
1.2 Πληροφορίες πίνακα ανάπτυξης
1.3 Πληροφορίες προγράμματος εντοπισμού σφαλμάτων
2.1 Κύκλωμα διασύνδεσης υλικού
2.2 Το FSB διαμορφώνει το IO του DS18B20
2.3 Δημιουργία αρχείων έργου Keil
3 Κωδικός προγράμματος οδήγησης DS18B20
3.2 Υλοποίηση προγράμματος οδήγησης DS18B20
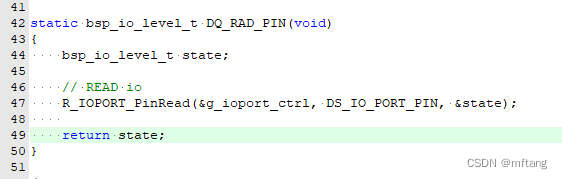
3.2.2 Ανάγνωση λειτουργίας κατάστασης IO
Το Renesas R7FA8D1BH (Cortex®-M85) ελέγχει τα DS18B20 και ADC για να επιτύχει τη λειτουργία άλματος δύο σελίδων
Αυτό το άρθρο εισάγει κυρίως μια περιεκτική περίπτωση εφαρμογής σχεδιασμένη για το Renesas R7FA8D1BH (Cortex®-M85): εφαρμόζοντας το IO του R7FA8D1BH για την υλοποίηση ενός πρωτοκόλλου διαύλου και πραγματοποιώντας τη λειτουργία οδήγησης ds18b20 Ολοκληρώνει κυρίως την ανάγνωση της τιμής θερμοκρασίας και τη μορφοποίηση της τιμής εμφάνιση στο OLED στην οθόνη. Τα δεδομένα θερμοκρασίας αποστέλλονται επίσης στο τερματικό της σειριακής θύρας μέσω του τερματικού της σειριακής θύρας.
| Πληροφορίες λογισμικού και υλικού | Πληροφορίες έκδοσης |
|---|---|
| Renesas MCU | R7FA8D1BH |
| Keil | MDK ARM 5.38 |
| Έκδοση FSP | 5.3.0 |
| Εργαλείο εντοπισμού σφαλμάτων: N32G45XVL-STB | DAP-LINK |
Ο συγγραφέας επέλεξε να χρησιμοποιήσει την Wildfire Yaoyang board_Renesas RA8 Η κύρια μονάδα ελέγχου MCU αυτής της πλακέτας είναι R7FA8D1BHECBD και ο πυρήνας της 7FA8D1BHECBD είναι ARM Contex-M85.
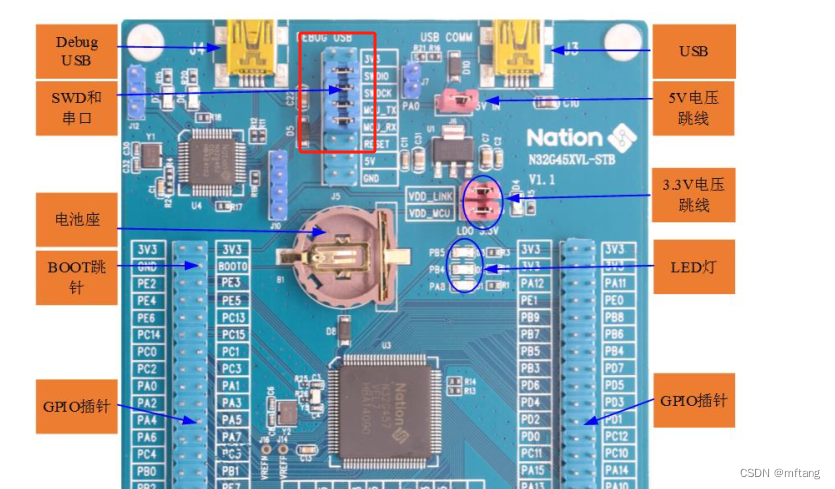
Για το τσιπ R7FA8D1BHECBD, ο πυρήνας που χρησιμοποιείται είναι Cortex®-M85 Core, ST-LINK-V2 ή J-LINK-V9 δεν υποστηρίζει λειτουργίες λήψης και εντοπισμού σφαλμάτων.Μετά από πολλές προσπάθειες, ο συγγραφέας το διαπίστωσεN32G45XVL-STBΤο DAP-LINK που συνοδεύει την πλακέτα μπορεί να πραγματοποιήσει λήψη και εντοπισμό σφαλμάτων του R7FA8D1BHECBD.
Η παρακάτω εικόνα είναι μια φυσική εικόνα της πλακέτας ανάπτυξης N32G45XVL-STB:
Το κύκλωμα διασύνδεσης του DS18B20 έχει σχεδιαστεί στο Yaoyang Development Board_Renesas RA8, το οποίο χρησιμοποιεί τη διεπαφή P809 ως σήμα ελέγχου DQ του DS18B20.

Διαμορφώστε το P809 ως κοινή διεπαφή IO και, στη συνέχεια, ρυθμίστε δυναμικά την κατάσταση εξόδου ή εξόδου του IO στον κώδικα
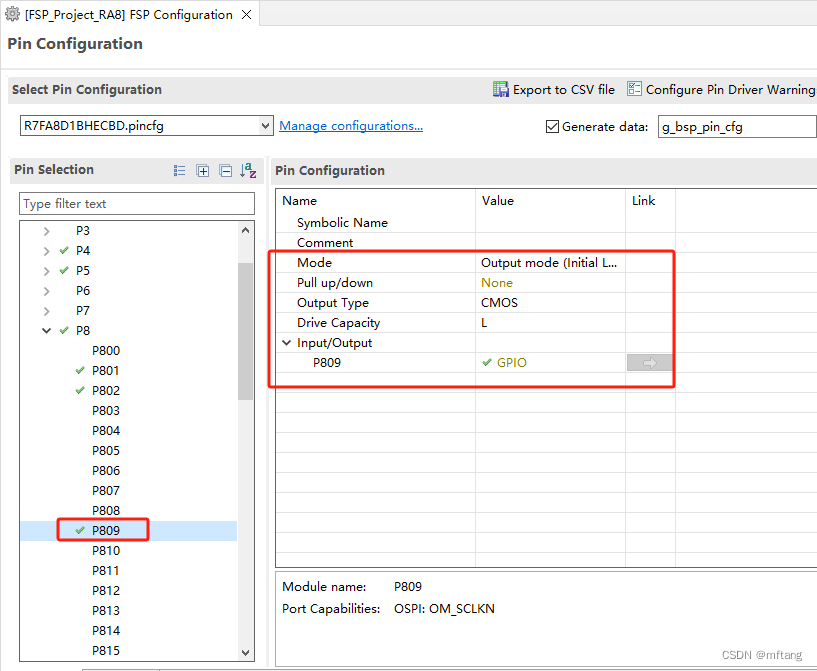
Αφού ολοκληρώσετε τη διαμόρφωση παραμέτρων του FSP, μπορείτε να δημιουργήσετε έργο. Ανοίξτε το αρχείο του έργου, η δομή του είναι η εξής:

Δημιουργήστε το αρχείο ds18b20.c για να εφαρμόσετε τον κώδικα του προγράμματος οδήγησης
Ο συγγραφέας έχει ήδη αναλύσει λεπτομερώς τη λογική χρονισμού και υλοποίησης του DS18B20 στο προηγούμενο άρθρο του, οπότε δεν θα το παρουσιάσω εδώ.
Σημείωση εφαρμογής DS18B20_Κυματομορφή δεδομένων ανάγνωσης ds18b20-Ιστολόγιο CSDN
Γραμμή 14 του κώδικα: Ορίστε μας τη λειτουργία καθυστέρησης βημάτων
Γραμμή 15 του κώδικα: Ορίστε τη λειτουργία καθυστέρησης βημάτων ms
Γραμμή 18 του κωδικού: Ορίστε το IO PIN του DS18B20
Γραμμή 21 κώδικα: Διαμόρφωση θύρας εισόδου
Γραμμή 22 κώδικα: Διαμόρφωση θύρας εξόδου
Γραμμή 24 κώδικα: Ορίστε χαμηλό επίπεδο IO
Γραμμή 25 κώδικα: Ορίστε υψηλό επίπεδο IO

Γραμμή 47 κώδικα: Διαβάστε την κατάσταση του IO στη λειτουργία εισαγωγής
Λειτουργία: ds18b20Init, ανίχνευση εάν το DS18B20 είναι συνδεδεμένο
Λειτουργία: ds18b20BlockModeProcess. Διαβάστε την τιμή του DS18B20
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
Γραμμή 113 του κώδικα: Διαβάστε την τιμή του ds18b20
Γραμμή 130 του κώδικα: Λάβετε τα δεδομένα αποτελέσματος του ds18b20
Γραμμή 131 κώδικα: Μορφοποιημένα δεδομένα οθόνης
Γραμμή 132 κώδικα: Εμφάνιση δεδομένων σε OLED
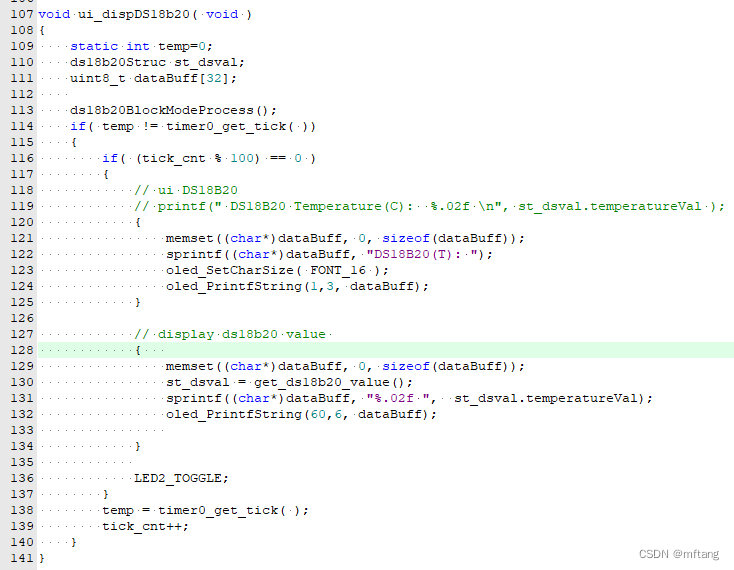
Μεταγλωττίστε τον κώδικα και κατεβάστε τον κώδικα στον πίνακα Τα αποτελέσματα που εκτελούνται είναι τα εξής:

Κωδικός προγράμματος οδήγησης DS18B20
1) Δημιουργήστε το αρχείο ds18b20.c και γράψτε τον παρακάτω κώδικα
- /*
- FILE NAME : ds18b20.c
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #include "ds18b20.h"
- #include "hal_data.h"
-
- typedef enum{
- INPUT = 0,
- OUTPUT = 1,
- }IO_TYPE;
-
- typedef enum{
- FALSE = 0,
- TRUE = 1,
- }RETURN_RESULT;
-
- typedef enum{
- INIT_DQ = 0,
- WAIT_READY,
- SKIDROM_CMD,
-
- WAIT_CONVERT,
- RESET_CMD,
- READ_CMD,
-
- WAIT_DATA_READY,
- GET_VALUE,
- IDLE_NULL
- }RUN_STATE;
-
- ds18b20Struc st_ds1b20val;
-
-
- ds18b20Struc get_ds18b20_value( void )
- {
- return st_ds1b20val;
- }
-
- static bsp_io_level_t DQ_RAD_PIN(void)
- {
- bsp_io_level_t state;
-
- // READ io
- R_IOPORT_PinRead(&g_ioport_ctrl, DS_IO_PORT_PIN, &state);
-
- return state;
- }
-
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
-
-
-
- /* End of this file */
2) Δημιουργήστε το αρχείο ds18b20.h και γράψτε τον παρακάτω κώδικα
- /*
- FILE NAME : ds18b20.h
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #ifndef DS18B20_H
- #define DS18B20_H
- #include "hal_data.h"
-
-
- #define WAIT_CNT_CONVERT 500
-
- #define timeDelayUS(us) R_BSP_SoftwareDelay(us, BSP_DELAY_UNITS_MICROSECONDS);
- #define DS_DELAY_MS(ms) R_BSP_SoftwareDelay(ms, BSP_DELAY_UNITS_MILLISECONDS);
-
-
- #define DS_IO_PORT_PIN BSP_IO_PORT_08_PIN_09
-
-
- #define DS_Mode_IN_PUT() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_INPUT)
- #define DS_Mode_Out_PP() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_OUTPUT)
-
- #define DQ_SET_LOW R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_LOW)
- #define DQ_SET_HIGH R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_HIGH)
-
-
- typedef struct{
- float temperatureVal;
- bool sign;
- }ds18b20Struc;
-
- uint8_t ds18b20BlockModeProcess( void );
- ds18b20Struc get_ds18b20_value( void );
-
-
- #endif /* DS18B20_H */
-
-

Έχει αφοσιωθεί στην έρευνα της τεχνολογίας για περισσότερα από 30 χρόνια και είναι ικανός σε διάφορες γλώσσες όπως java, linux, javascript, php, css κ.λπ. Έχει κάνει πολλές συνεισφορές στον τομέα του ανοιχτού κώδικα τεκμηρίωσης προγραμματιστή για να μοιραστείτε ορισμένα ζητήματα στην ανάπτυξη τεχνολογίας για μελλοντική αναφορά

Ταχυδρομείο[email protected]