
моя контактная информация
Почтамезофия@protonmail.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Оглавление
1 Программное и аппаратное обеспечение
1.1 Информация о программной и аппаратной среде
1.2 Информация о плате разработки
2.1 Схема аппаратного интерфейса
2.2 FSB настраивает ввод-вывод DS18B20
2.3 Создание файлов проекта Keil
3.2 Реализация драйвера DS18B20
3.2.1 Определение статуса ввода-вывода
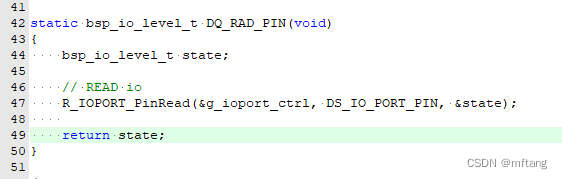
3.2.2 Функция чтения статуса ввода-вывода
Renesas R7FA8D1BH (Cortex®-M85) управляет DS18B20 и АЦП для достижения функции перехода на две страницы.
В этой статье в основном представлен комплексный пример применения, разработанный для Renesas R7FA8D1BH (Cortex®-M85): применение ввода-вывода R7FA8D1BH для реализации одного протокола шины и реализации функции управления ds18b20. В основном он завершает считывание значения температуры и форматирование значения для. отображение на OLED-экране. Данные о температуре также отправляются на терминал последовательного порта через терминал последовательного порта.
| Информация о программном и аппаратном обеспечении | Информация о версии |
|---|---|
| Ренесас МК | Р7ФА8Д1БХ |
| Кейл | МДК АРМ 5.38 |
| Версия ФСП | 5.3.0 |
| Инструмент отладки: N32G45XVL-STB | DAP-LINK |
Автор решил использовать плату разработки Wildfire Yaoyang_Renesas RA8. Основным управляющим микроконтроллером этой платы является R7FA8D1BHECBD, а ядром 7FA8D1BHECBD — ARM Contex-M85.
Для чипа R7FA8D1BHECBD используется ядро Cortex®-M85 Core, ST-LINK-V2 или J-LINK-V9 не поддерживает функции загрузки и отладки.После многих попыток автор обнаружил, чтоN32G45XVL-STBDAP-LINK, поставляемый в комплекте с платой, позволяет загружать и отлаживать R7FA8D1BHECBD.
На рисунке ниже показано физическое изображение платы разработки N32G45XVL-STB:
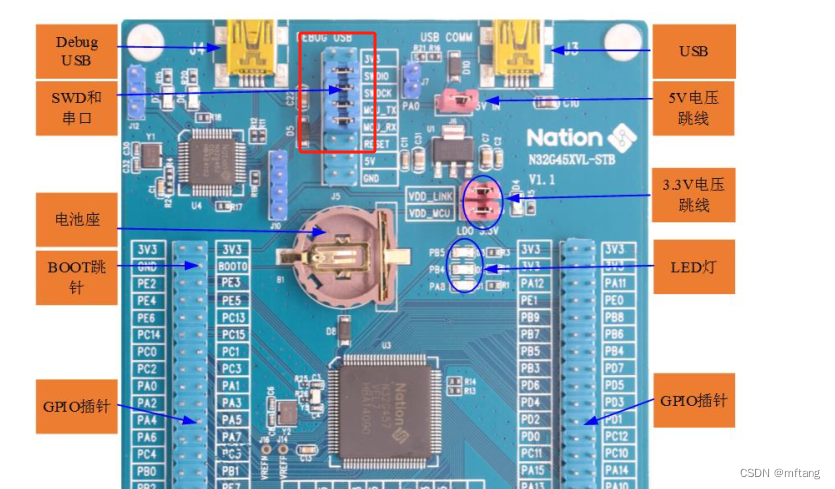
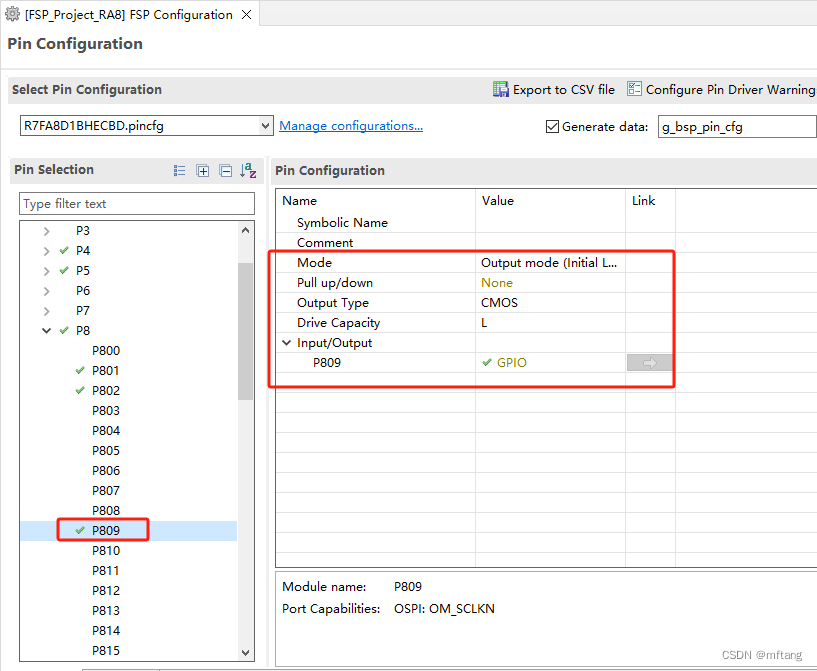
Схема интерфейса DS18B20 была разработана на плате разработки Yaoyang_Renesas RA8, которая использует интерфейс P809 в качестве сигнала управления DQ DS18B20.

Настройте P809 как общий интерфейс ввода-вывода, а затем динамически настройте выход или состояние выхода ввода-вывода в коде.
После завершения настройки параметров FSP вы можете сгенерировать проект. Откройте файл проекта, его структура следующая:

Создайте файл ds18b20.c для реализации кода драйвера.
В предыдущей статье автор подробно проанализировал сроки и логику реализации DS18B20, поэтому я не буду ее здесь приводить.
Замечания по применению DS18B20_Форма сигнала чтения данных ds18b20 — блог CSDN
Строка 14 кода: Определите функцию пошаговой задержки.
Строка 15 кода: определение функции задержки шага мс.
Строка 18 кода: Определите PIN-код ввода-вывода DS18B20.
Строка 21 кода: конфигурация входного порта.
Строка 22 кода: конфигурация выходного порта.
Строка 24 кода: установите низкий уровень ввода-вывода.
Строка 25 кода: установите высокий уровень ввода-вывода.

Строка 47 кода: чтение состояния ввода-вывода в режиме ввода.
Функция: ds18b20Init, определяет, находится ли DS18B20 в сети.
Функция: ds18b20BlockModeProcess. Прочитайте значение DS18B20
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
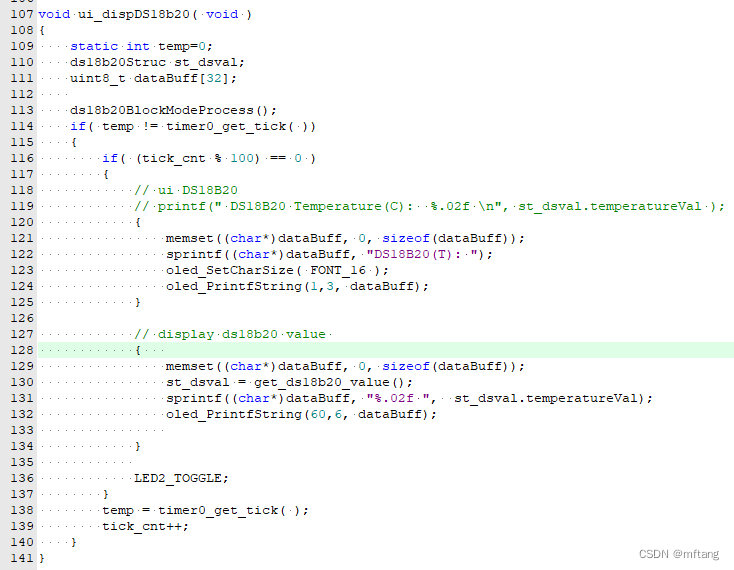
Строка 113 кода: прочтите значение ds18b20.
Строка 130 кода: получение данных результата ds18b20.
Строка 131 кода: форматированные отображаемые данные.
Строка 132 кода: отображение данных на OLED.
Скомпилируйте код и загрузите его на плату. Результаты работы следующие:

Код драйвера DS18B20
1) Создайте файл ds18b20.c и напишите следующий код.
- /*
- FILE NAME : ds18b20.c
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #include "ds18b20.h"
- #include "hal_data.h"
-
- typedef enum{
- INPUT = 0,
- OUTPUT = 1,
- }IO_TYPE;
-
- typedef enum{
- FALSE = 0,
- TRUE = 1,
- }RETURN_RESULT;
-
- typedef enum{
- INIT_DQ = 0,
- WAIT_READY,
- SKIDROM_CMD,
-
- WAIT_CONVERT,
- RESET_CMD,
- READ_CMD,
-
- WAIT_DATA_READY,
- GET_VALUE,
- IDLE_NULL
- }RUN_STATE;
-
- ds18b20Struc st_ds1b20val;
-
-
- ds18b20Struc get_ds18b20_value( void )
- {
- return st_ds1b20val;
- }
-
- static bsp_io_level_t DQ_RAD_PIN(void)
- {
- bsp_io_level_t state;
-
- // READ io
- R_IOPORT_PinRead(&g_ioport_ctrl, DS_IO_PORT_PIN, &state);
-
- return state;
- }
-
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
-
-
-
- /* End of this file */
2) Создайте файл ds18b20.h и напишите следующий код.
- /*
- FILE NAME : ds18b20.h
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #ifndef DS18B20_H
- #define DS18B20_H
- #include "hal_data.h"
-
-
- #define WAIT_CNT_CONVERT 500
-
- #define timeDelayUS(us) R_BSP_SoftwareDelay(us, BSP_DELAY_UNITS_MICROSECONDS);
- #define DS_DELAY_MS(ms) R_BSP_SoftwareDelay(ms, BSP_DELAY_UNITS_MILLISECONDS);
-
-
- #define DS_IO_PORT_PIN BSP_IO_PORT_08_PIN_09
-
-
- #define DS_Mode_IN_PUT() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_INPUT)
- #define DS_Mode_Out_PP() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_OUTPUT)
-
- #define DQ_SET_LOW R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_LOW)
- #define DQ_SET_HIGH R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_HIGH)
-
-
- typedef struct{
- float temperatureVal;
- bool sign;
- }ds18b20Struc;
-
- uint8_t ds18b20BlockModeProcess( void );
- ds18b20Struc get_ds18b20_value( void );
-
-
- #endif /* DS18B20_H */
-
-

Он посвятил себя исследованию технологий более 30 лет и владеет различными языками, такими как Java, Linux, Javascript, php, css и т. д. Он внес большой вклад в область открытого исходного кода. Станция документации для разработчиков, где можно поделиться некоторыми проблемами в разработке технологий для дальнейшего использования. Все ознакомьтесь.

Почтамезофия@protonmail.com