2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
विषयवस्तुसारणी
१.१ सॉफ्टवेयर तथा हार्डवेयर वातावरणस्य सूचना
२.१ हार्डवेयर इन्टरफेस् सर्किट्
2.2 FSB DS18B20 इत्यस्य IO विन्यस्यति
2.3 Keil परियोजना सञ्चिकाः जनयन्तु
३.२ DS18B20 चालकस्य कार्यान्वयनम्
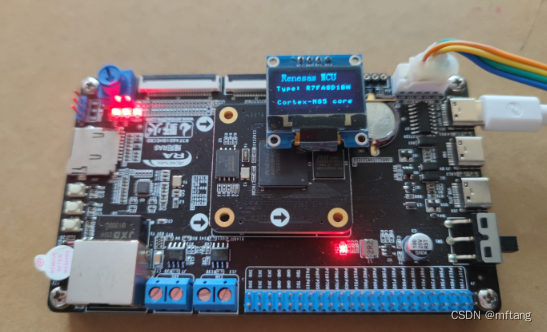
Renesas R7FA8D1BH (Cortex®-M85) पृष्ठद्वयस्य कूदकार्यं प्राप्तुं DS18B20 तथा ADC नियन्त्रयति
अयं लेखः मुख्यतया Renesas R7FA8D1BH (Cortex®-M85) कृते डिजाइनं कृतं व्यापकं अनुप्रयोगप्रकरणं परिचययति: एकं बसप्रोटोकॉलं कार्यान्वितुं R7FA8D1BH इत्यस्य IO प्रयोक्तुं तथा च ds18b20 चालनस्य कार्यस्य साक्षात्कारः मुख्यतया तापमानमूल्यं पठितुं मूल्यं च स्वरूपयति स्क्रीन् मध्ये OLED इत्यत्र प्रदर्शयति। तापमानदत्तांशः क्रमिकपोर्ट् टर्मिनल् मार्गेण सीरियल पोर्ट् टर्मिनल् प्रति अपि प्रेष्यते ।
| सॉफ्टवेयर तथा हार्डवेयर सूचना | संस्करण सूचना |
|---|---|
| रेनेसास एमसीयू | R7FA8D1BH |
| केइल | एमडीके आर्म ५.३८ |
| FSP संस्करणम् | 5.3.0 |
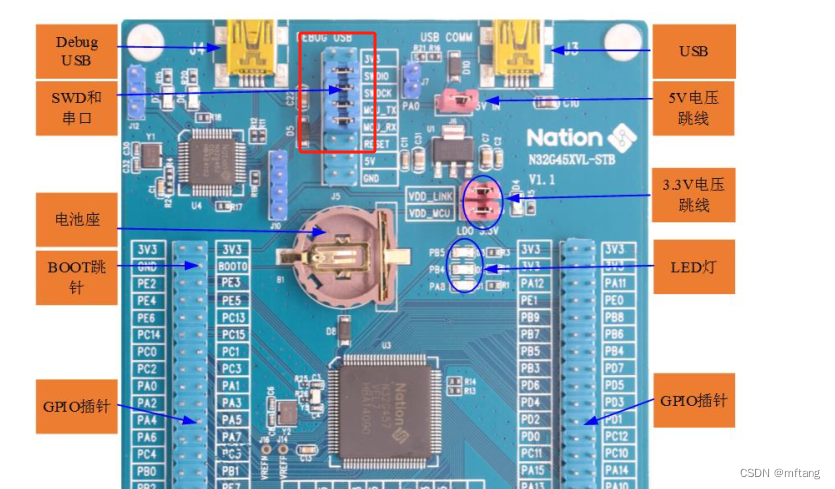
| त्रुटिनिवारणसाधनम्: N32G45XVL-STB | DAP-LINK इति |
लेखकः Wildfire Yaoyang विकास बोर्ड_Renesas RA8 इत्यस्य उपयोगं कर्तुं चयनं कृतवान् अस्य बोर्डस्य मुख्यं नियन्त्रण MCU R7FA8D1BHECBD अस्ति, तथा च 7FA8D1BHECBD इत्यस्य मूलं ARM Contex-M85 अस्ति ।
R7FA8D1BHECBD चिप् कृते, प्रयुक्तः कोरः Cortex®-M85 Core अस्ति, ST-LINK-V2 अथवा J-LINK-V9 डाउनलोड् करणं तथा त्रुटिनिवारणकार्यं समर्थयति नास्ति ।अनेकप्रयत्नानन्तरं लेखकः तत् प्राप्नोत्N32G45XVL-एसटीबीबोर्डेन सह यत् DAP-LINK आगच्छति तत् R7FA8D1BHECBD डाउनलोड् कृत्वा त्रुटिनिवारणं कर्तुं शक्नोति ।
अधोलिखितं चित्रं N32G45XVL-STB विकासबोर्डस्य भौतिकचित्रम् अस्ति:
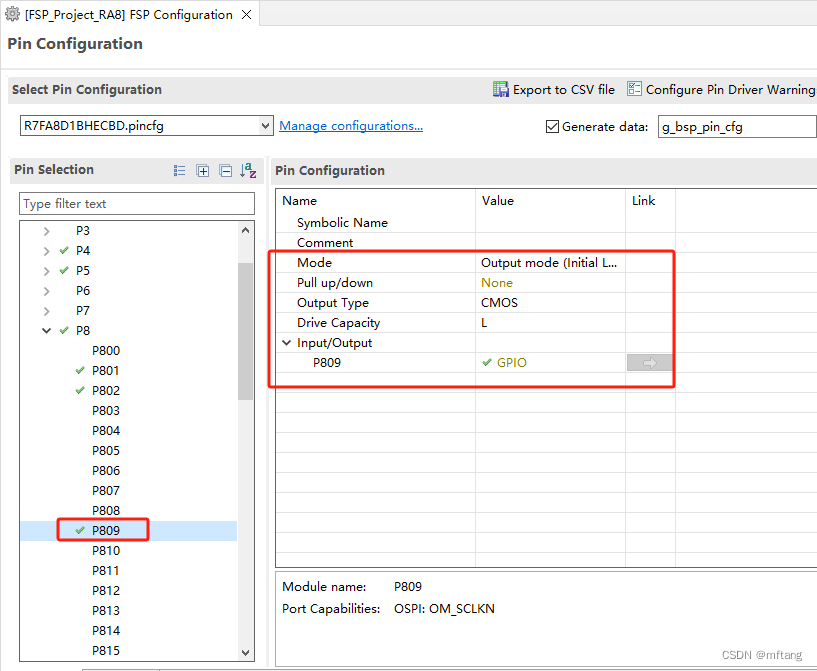
DS18B20 इत्यस्य अन्तरफलकपरिपथं Yaoyang Development Board_Renesas RA8 इत्यत्र डिजाइनं कृतम् अस्ति, यत् DS18B20 इत्यस्य DQ नियन्त्रणसंकेतरूपेण P809 अन्तरफलकस्य उपयोगं करोति ।

P809 इत्येतत् सामान्य IO अन्तरफलकरूपेण विन्यस्यताम्, ततः कोडमध्ये IO इत्यस्य आउटपुट् अथवा आउटपुट् स्थितिं गतिशीलरूपेण विन्यस्यताम्
FSP इत्यस्य पैरामीटर् विन्यासं सम्पन्नं कृत्वा, भवान् Generate Project कर्तुं शक्नोति । परियोजनासञ्चिकां उद्घाटयन्तु, तस्य संरचना एतादृशी अस्ति ।

चालकसङ्केतं कार्यान्वितुं ds18b20.c सञ्चिकां रचयन्तु
लेखकेन पूर्वमेव स्वस्य पूर्वलेखे DS18B20 इत्यस्य समयस्य कार्यान्वयनस्य च तर्कस्य विस्तरेण विश्लेषणं कृतम् अस्ति, अतः अहम् अत्र तस्य परिचयं न करिष्यामि ।
DS18B20 एप्लिकेशन नोट_Ds18b20 रीडिंग डेटा-CSDN ब्लॉग के तरंगरूप
कोडस्य पङ्क्तिः १४ : अस्मान् step delay function परिभाषयतु
कोडस्य पङ्क्तिः १५ : ms step delay function परिभाषयन्तु
कोडस्य रेखा १८ : DS18B20 इत्यस्य IO PIN परिभाषयन्तु
कोडस्य पङ्क्तिः २१ : इनपुट् पोर्ट् विन्यासः
कोडस्य पङ्क्तिः २२ : आउटपुट् पोर्ट् विन्यासः
कोडस्य पङ्क्तिः २४ : IO निम्नस्तरं सेट् कुर्वन्तु
कोडस्य पङ्क्तिः २५ : IO उच्चस्तरं सेट् कुर्वन्तु

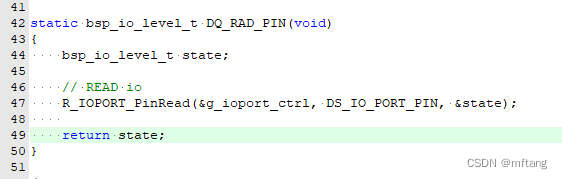
कोडस्य पङ्क्तिः ४७ : इनपुट् मोड् मध्ये IO इत्यस्य स्थितिं पठन्तु
कार्यं: ds18b20Init, DS18B20 ऑनलाइन अस्ति वा इति ज्ञातव्यम्
कार्य: ds18b20BlockModeProcess। DS18B20 इत्यस्य मूल्यं पठन्तु
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
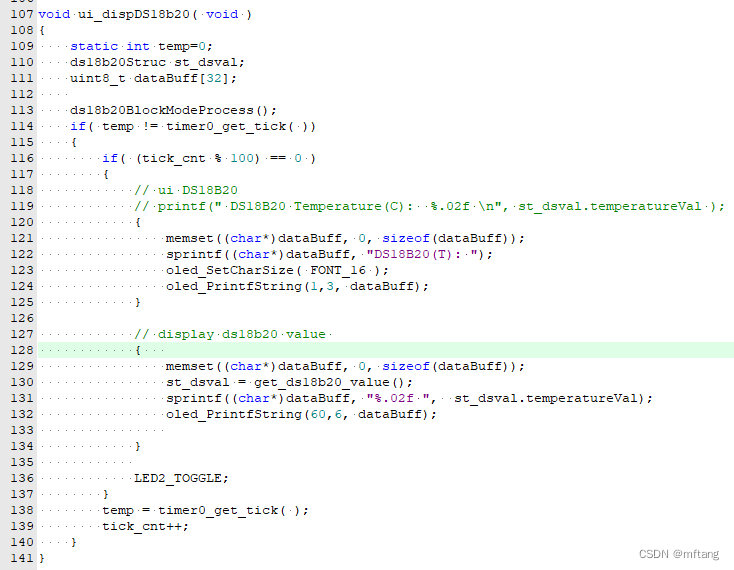
कोडस्य पङ्क्तिः ११३ : ds18b20 इत्यस्य मूल्यं पठन्तु
कोडस्य रेखा १३० : ds18b20 इत्यस्य परिणामदत्तांशं प्राप्नुवन्तु
कोडस्य पङ्क्तिः १३१ : प्रारूपितः प्रदर्शनदत्तांशः
कोडस्य पङ्क्तिः १३२ : OLED इत्यत्र आँकडानां प्रदर्शनं कुर्वन्तु
कोडं संकलितं कृत्वा कोडं बोर्ड् मध्ये डाउनलोड् कुर्वन्तु ।

DS18B20 चालकसङ्केतः
1) ds18b20.c सञ्चिकां रचयित्वा निम्नलिखित कोडं लिखन्तु
- /*
- FILE NAME : ds18b20.c
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #include "ds18b20.h"
- #include "hal_data.h"
-
- typedef enum{
- INPUT = 0,
- OUTPUT = 1,
- }IO_TYPE;
-
- typedef enum{
- FALSE = 0,
- TRUE = 1,
- }RETURN_RESULT;
-
- typedef enum{
- INIT_DQ = 0,
- WAIT_READY,
- SKIDROM_CMD,
-
- WAIT_CONVERT,
- RESET_CMD,
- READ_CMD,
-
- WAIT_DATA_READY,
- GET_VALUE,
- IDLE_NULL
- }RUN_STATE;
-
- ds18b20Struc st_ds1b20val;
-
-
- ds18b20Struc get_ds18b20_value( void )
- {
- return st_ds1b20val;
- }
-
- static bsp_io_level_t DQ_RAD_PIN(void)
- {
- bsp_io_level_t state;
-
- // READ io
- R_IOPORT_PinRead(&g_ioport_ctrl, DS_IO_PORT_PIN, &state);
-
- return state;
- }
-
- /**
- * @brief reset DS18B20
- * @note if reset ds18b20 sucess, the return value is TRUE
- * @param None
- * @retval True or Flalse
- */
- static uint8_t ds18b20Init( void )
- {
- uint16_t tempCnt = 0;
- bsp_io_level_t status;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- // Master pin is high
- DQ_SET_HIGH;
- timeDelayUS(10);
-
- // Master pin is low
- DQ_SET_LOW;
- // wait for 600 us
- timeDelayUS(750);
-
- // Set PIN mode input
- DS_Mode_IN_PUT();
-
- while(1)
- {
- status = DQ_RAD_PIN();
- if( status == 0)
- {
- tempCnt = 0;
- return TRUE;
- }
- else
- {
- timeDelayUS(1);
- tempCnt++;
- if( tempCnt > 480 )
- return FALSE;
- }
- }
- }
-
-
- static uint8_t readBit( void )
- {
- uint8_t readCnt = 2;
- uint8_t bitVal = 1;
-
- DQ_SET_LOW;
- timeDelayUS(3);
- DQ_SET_HIGH;
-
- timeDelayUS(5); // 15 us
-
- while(readCnt-- )
- {
- //read DQ value
- if( DQ_RAD_PIN() == 0)
- {
- bitVal = 0;
- }
- timeDelayUS(2); // 15 us
- }
-
- timeDelayUS(30); // 15 us
-
- return bitVal;
- }
-
- static uint8_t ds18b20ReadByte( void )
- {
- uint8_t byteVal = 0;
-
- for ( uint8_t i = 0; i < 8; i++ )
- {
- byteVal >>= 1;
-
- uint8_t bitVal = readBit();
- if( bitVal > 0)
- {
- byteVal |= 0x80;
- }
- }
-
- return byteVal;
- }
-
-
- /**
- * @brief write one byte to DS18B20
- * @note
- * @param byte: the data that is sended to ds18b20
- * @retval None
- */
- void ds18b20WriteByte( uint8_t byte)
- {
- unsigned char k;
-
- // Set PIN mode output
- DS_Mode_Out_PP();
-
- for ( k = 0; k < 8; k++ )
- {
- if (byte & (1<<k))
- {
- DQ_SET_LOW;
- timeDelayUS(2);
-
- DQ_SET_HIGH;
- timeDelayUS(65);
- }
- else
- {
- DQ_SET_LOW;
- timeDelayUS(65);
-
- DQ_SET_HIGH;
- timeDelayUS(2);
- }
- }
- }
-
- uint8_t ds18b20BlockModeProcess( void )
- {
- uint16_t tempValue;
- uint8_t tempL, tempH;
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
-
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // start convert temperature
-
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- // wait for 600 us
- timeDelayUS(600);
-
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
-
- return TRUE;
- }
-
-
- // NO blocking mode operate ds18b20
- uint8_t ds18b20NoBlockingProcess( void )
- {
- uint16_t tempValue;
- static uint16_t waitCnt = 0;
- uint8_t tempL, tempH;
- static uint8_t runState = 0;
-
- switch( runState )
- {
- default:
- case INIT_DQ:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_READY;
- break;
-
- case WAIT_READY:
- timeDelayUS(2); // IDEL
- runState = SKIDROM_CMD;
- break;
-
- case SKIDROM_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0x44); // begin to convert temperature data
- waitCnt = 0;
- runState = WAIT_CONVERT;
- break;
-
- case WAIT_CONVERT:
- waitCnt++;
- if( waitCnt > WAIT_CNT_CONVERT)
- {
- waitCnt = 0;
- runState = RESET_CMD;
- }
- break;
-
- case RESET_CMD:
- if (ds18b20Init() == FALSE)
- {
- return FALSE;
- }
- runState = WAIT_DATA_READY;
- break;
-
- case WAIT_DATA_READY:
- timeDelayUS(2); // IDEL
- runState = READ_CMD;
- break;
-
- case READ_CMD:
- ds18b20WriteByte(0xcc);
- ds18b20WriteByte(0xbe); // read temperature data register
- runState = GET_VALUE;
- break;
-
- case GET_VALUE:
-
- tempL = ds18b20ReadByte();
- tempH = ds18b20ReadByte();
-
- if (tempH > 0x7f)
- {
- tempL = ~tempL;
- tempH = ~tempH+1;
- st_ds1b20val.sign = 1;
- }
-
- tempValue = (uint16_t)((tempH << 8) | tempL);
-
- st_ds1b20val.temperatureVal = (float)(tempValue * 0.0625);
- runState = INIT_DQ;
- return TRUE;
- }
-
- return FALSE;
- }
-
-
-
- /* End of this file */
2) ds18b20.h सञ्चिकां रचयित्वा निम्नलिखित कोड लिखन्तु
- /*
- FILE NAME : ds18b20.h
- Description: user ds18b20 interface
- Author : [email protected]
- Date : 2024/06/03
- */
- #ifndef DS18B20_H
- #define DS18B20_H
- #include "hal_data.h"
-
-
- #define WAIT_CNT_CONVERT 500
-
- #define timeDelayUS(us) R_BSP_SoftwareDelay(us, BSP_DELAY_UNITS_MICROSECONDS);
- #define DS_DELAY_MS(ms) R_BSP_SoftwareDelay(ms, BSP_DELAY_UNITS_MILLISECONDS);
-
-
- #define DS_IO_PORT_PIN BSP_IO_PORT_08_PIN_09
-
-
- #define DS_Mode_IN_PUT() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_INPUT)
- #define DS_Mode_Out_PP() R_IOPORT_PinCfg(&g_ioport_ctrl, DS_IO_PORT_PIN, IOPORT_CFG_PORT_DIRECTION_OUTPUT)
-
- #define DQ_SET_LOW R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_LOW)
- #define DQ_SET_HIGH R_IOPORT_PinWrite(&g_ioport_ctrl, DS_IO_PORT_PIN, BSP_IO_LEVEL_HIGH)
-
-
- typedef struct{
- float temperatureVal;
- bool sign;
- }ds18b20Struc;
-
- uint8_t ds18b20BlockModeProcess( void );
- ds18b20Struc get_ds18b20_value( void );
-
-
- #endif /* DS18B20_H */
-
-

सः ३० वर्षाणाम् अनुसरणं प्रौयोगिक कौलिका समुह, सलग, जावा, जावास्च, php, css समुच्चय भाषा सुनाधारी, ph, css समुच्चय संस्कृत भाषा सुनावं, सरोकार विद्वान विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग विनियोग

