2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Pyörivien koneiden värähtelyaaltomuotojen suuren melun häiriön vuoksi melu vaikuttaa helposti sellaisten vianmääritysmenetelmien tarkkuuteen, jotka poimivat ja valitsevat suoraan tärinätietoominaisuuksia. Tällä hetkellä kuvapohjainen pyörivien koneiden vianmääritystekniikka on kehittynyt nopeasti. Pyörivien koneiden vianmäärityksessä perinteiset menetelmät poimivat värinäkuvioita värähtelytiedoista. Tällä menetelmällä poimitut kuvaominaisuudet ovat intuitiivisia ja ilmeisiä, mikä voi varmistaa vianmäärityksen reaaliaikaisuuden ja tarkkuuden.
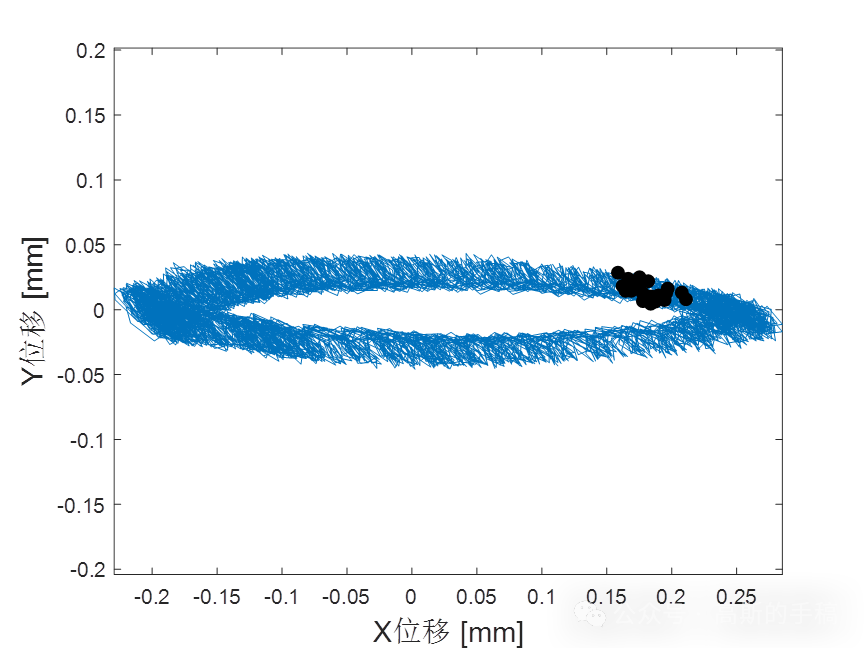
Vaikka värähtelyspektri voi ilmaista yksikön toimintatilan intuitiivisemmin, spektrin erottaminen vaatii silti paljon signaalinkäsittelyä. Akselin liikerata on tärkeä esitys pyörivän koneen pyörivän akselin värähtelysignaalista. Sen muoto-ominaisuudet liittyvät läheisesti yksikön toimintatilaan vikoja. Akseliratakaavio syntetisoidaan pääasiassa kahden roottorin säteen suunnassa kohtisuorassa olevan anturin keräämistä aaltomuototiedoista. Tämän vuoksi on viime aikoina tehty monia tutkimuksia pyörivien koneiden vikojen diagnosoimiseksi akselin liikerata.
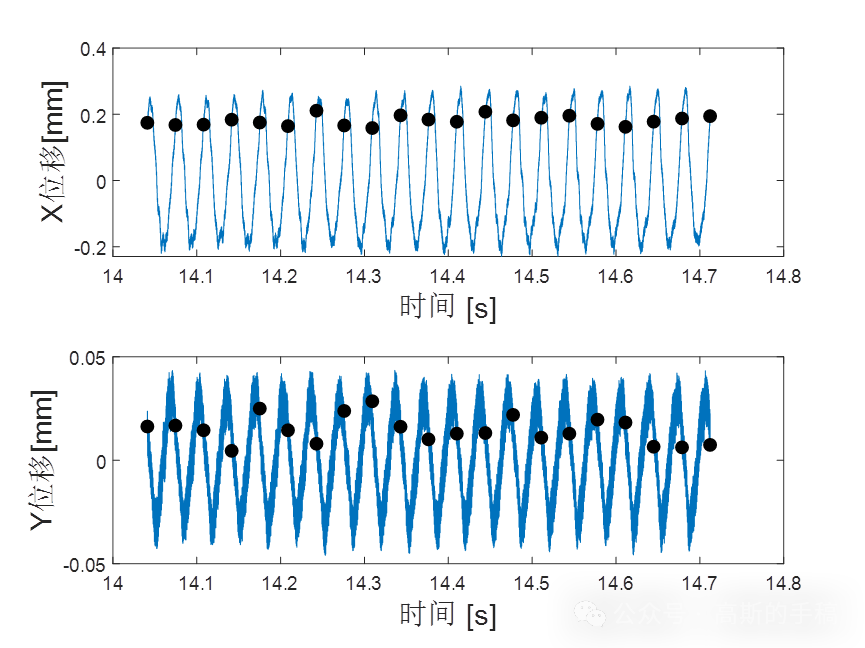
Akselin liikerata näyttää akseliviivan polun yhdistäen yksiulotteisen aikatason tiedot kahdesta ortogonaalisesta, samantasoisesta anturista kaksiulotteiseksi kartaksi roottorin akselin sivuttaisliikkeestä. Se, pitääkö akselin liikerata suodattaa, riippuu tilanteesta. Pivot-raita/aika-kaavio luodaan yhdistämällä jälki kahteen XY-aikakuvaajaan, joita käytetään jäljen/aikakaavion luomiseen. Aika-alueen kuvaaja näytetään jäljityskaavion oikealla puolella ja Y-kuvaaja on X-kuvaajan yläpuolella. Liikerata/aikaalueen kuvaajaa voidaan käyttää akselin liikeradan ominaisuuksien aikasuhteen määrittämiseen. Tämän vuoksi Matlabia käytetään pyörivän koneiston akselin liikeradan piirtämiseen.
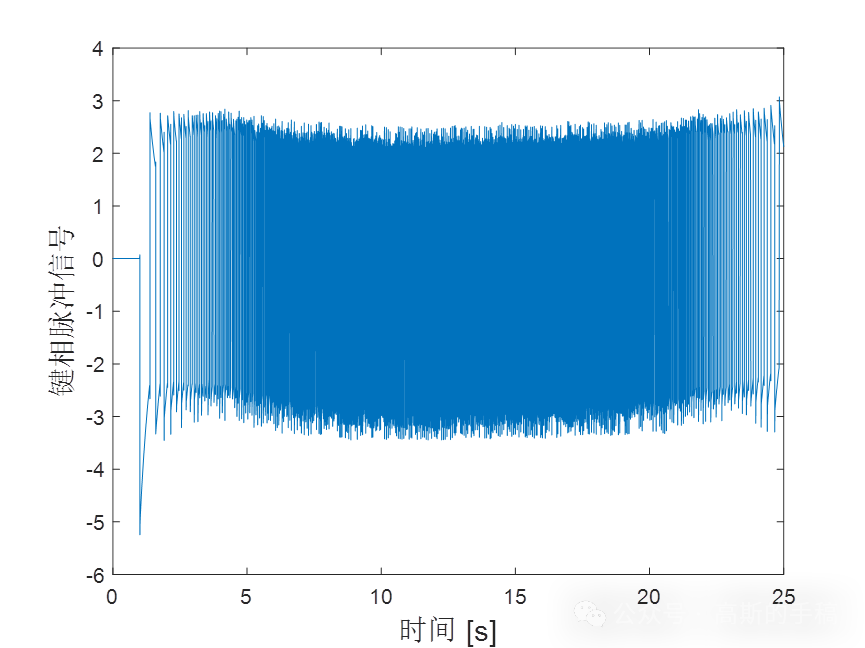
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
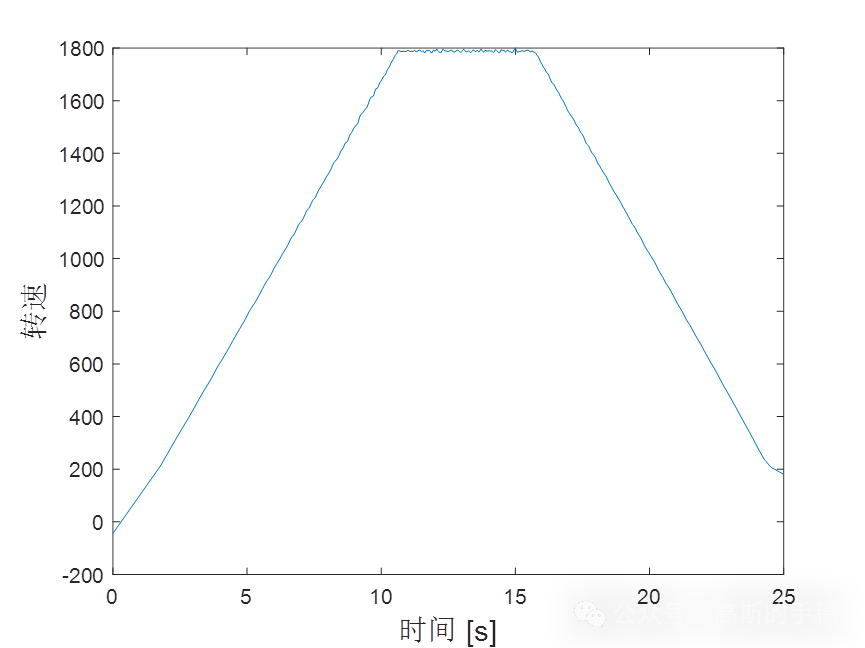
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
Osaamisalueet: moderni signaalinkäsittely, koneoppiminen, syväoppiminen, digitaaliset kaksoset, aikasarjaanalyysit, laitevikojen havaitseminen, laitepoikkeamien havaitseminen, laitteiden älykäs vikadiagnoosi ja terveydenhallinnan PHM jne.

Hän on omistautunut teknologian tutkimukselle yli kolmenkymmenen vuoden ajan ja hallitsee useita kieliä, kuten java, linux, javascript, php, css jne., ja hän on tehnyt monia panoksia avoimen lähdekoodin alalla Kehittäjän dokumentaatioasema, jossa voit jakaa joitakin teknologian kehityksen ongelmia tulevaa käyttöä varten

