
プライベートな連絡先の最初の情報
送料メール:
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
回転機械の振動波形はノイズ干渉が大きいため、振動データの特徴を直接抽出・選択する故障診断手法の精度はノイズの影響を受けやすい。現在、画像ベースの回転機械の故障診断技術が急速に発展しています。回転機械の故障診断では、従来の方法では振動データから振動パターンを抽出する傾向があり、この方法で抽出された画像特徴は直感的かつ明白であり、故障診断のリアルタイム性と精度をある程度確保できます。
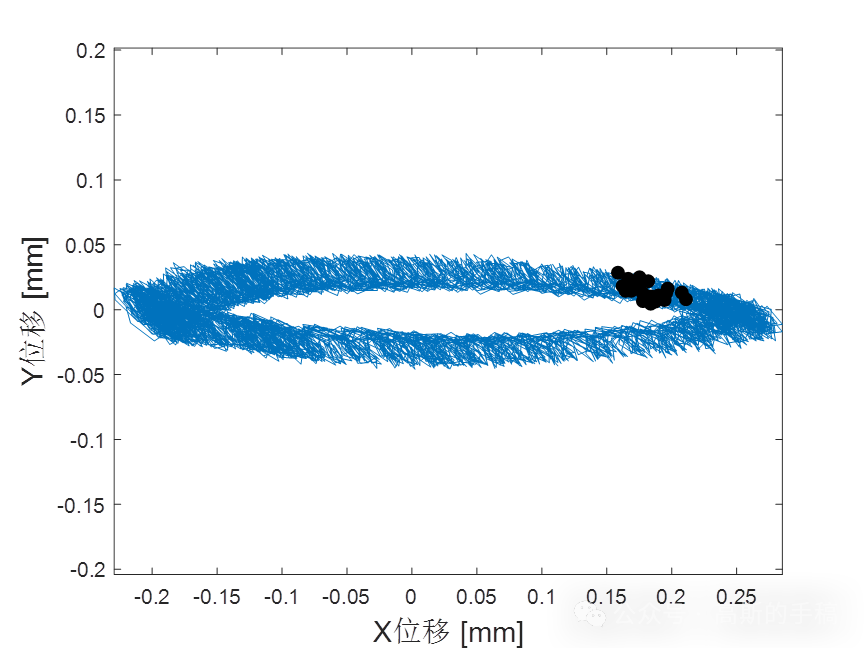
振動スペクトルはユニットの動作状態をより直感的に表現できますが、スペクトルの抽出には依然として大量の信号処理が必要です。軸軌跡は回転機械の回転軸の振動信号を表す重要な要素であり、その形状特性はユニットの動作状態と密接に関係しており、現在、多くの学者が機械の正確な診断を行うために特徴の抽出、分類、識別を行っています。欠点。軸軌跡図は主にロータの半径方向に垂直な2つのセンサによって収集された波形データから合成されるため、軌跡の取得方法は比較的簡単であるため、最近ではこれに基づいて回転機械の故障診断を実現する研究が盛んに行われています。軸の軌道。
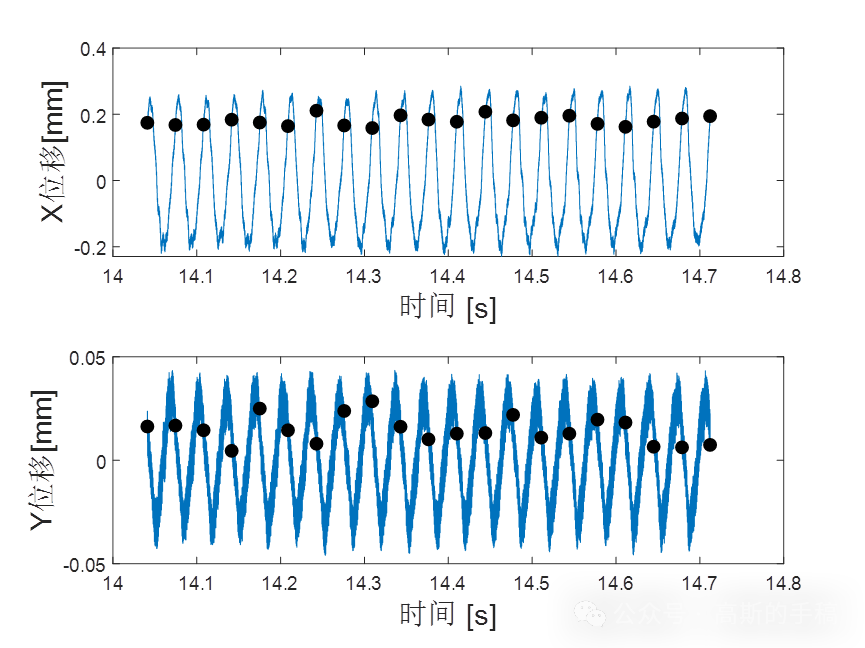
軸の軌跡は、2 つの直交する同一平面上のセンサーからの 1 次元の時間領域情報をローター シャフトの横方向の動きの 2 次元マップに結合して、軸線の経路を示します。軸の軌跡をフィルタリングする必要があるかどうかは、特定の状況によって異なります。ピボット トラック/時間プロットは、トラック/時間プロットの作成に使用された 2 つの XY 時間プロットとトラックを結合することによって作成されます。時間領域プロットはトレース プロットの右側に表示され、Y プロットは X プロットの上に表示されます。軌跡/時間領域プロットを使用して、軸軌跡上の特性の時間関係を確立できます。そこで、回転機械の軸軌道の描画には matlab を使用します。
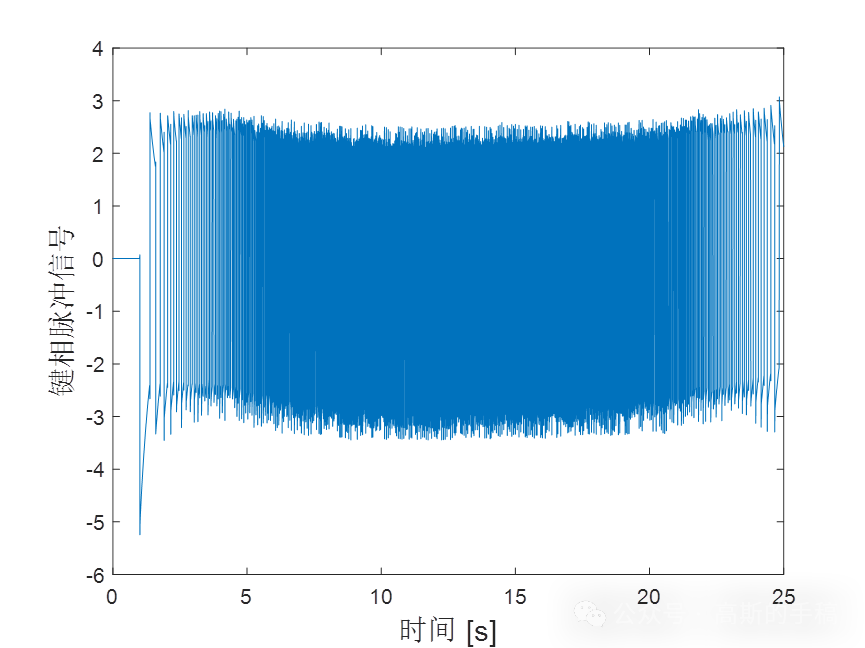
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
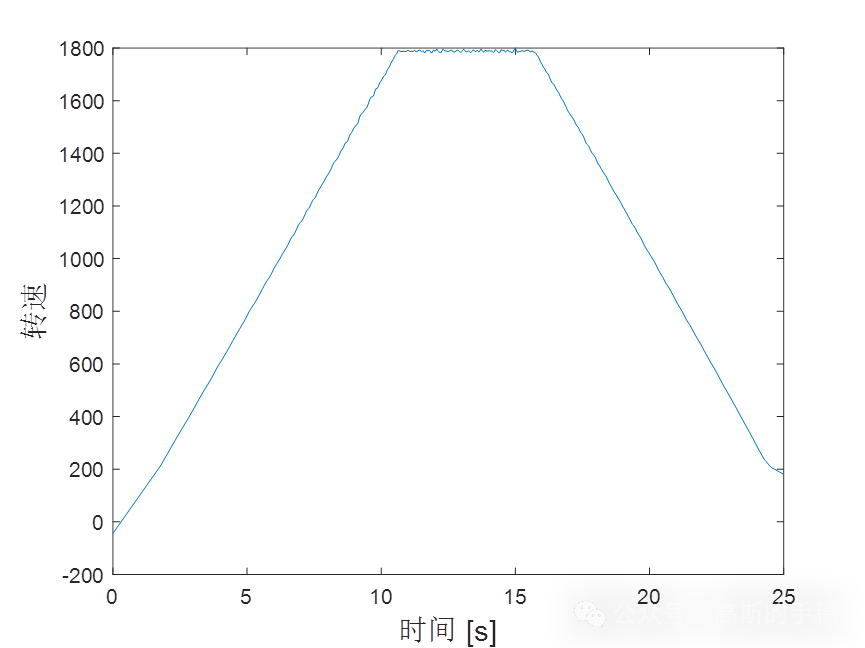
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
専門分野: 最新の信号処理、機械学習、深層学習、デジタル ツイン、時系列分析、機器の欠陥検出、機器の異常検出、機器のインテリジェントな故障診断と健全性管理 PHM など。

彼は 30 年以上テクノロジーの研究に専念しており、java、linux、javascript、php、css などのさまざまな言語に堪能であり、オープンソース分野で多くの貢献を行っています。将来の参考のために技術開発におけるいくつかの問題を共有する開発者ドキュメント ステーション。

送料メール: