2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Ob magnum strepitum impedimentum vibrationis fluctuationis machinae rotationis, subtilitas culpae diagnosis methodi quae directe extractum et selectum vibrationis notarum notarum sonum facile afficit. In praesenti, culpae diagnosis technologiae imaginis fundatae machinae rotationis celeriter processit. Culpa diagnosis machinationis rotationis, methodi traditae tendunt ad formas vibrationes extractas a vibratione data. Imaginum lineamenta hac methodo extracta sunt intuitiva et aperta, quae efficere possunt realem tempus et accurationem culpae diagnosis aliquatenus.
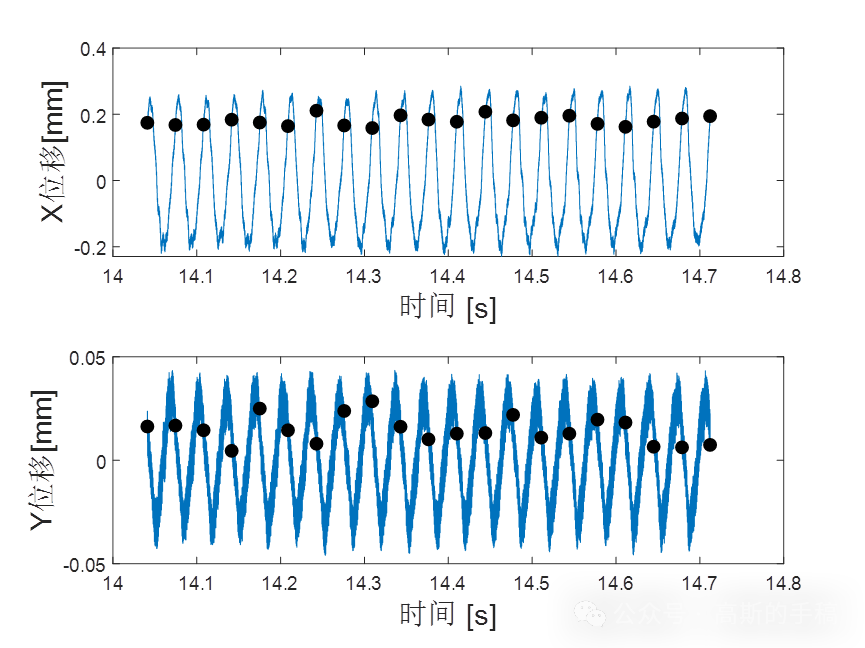
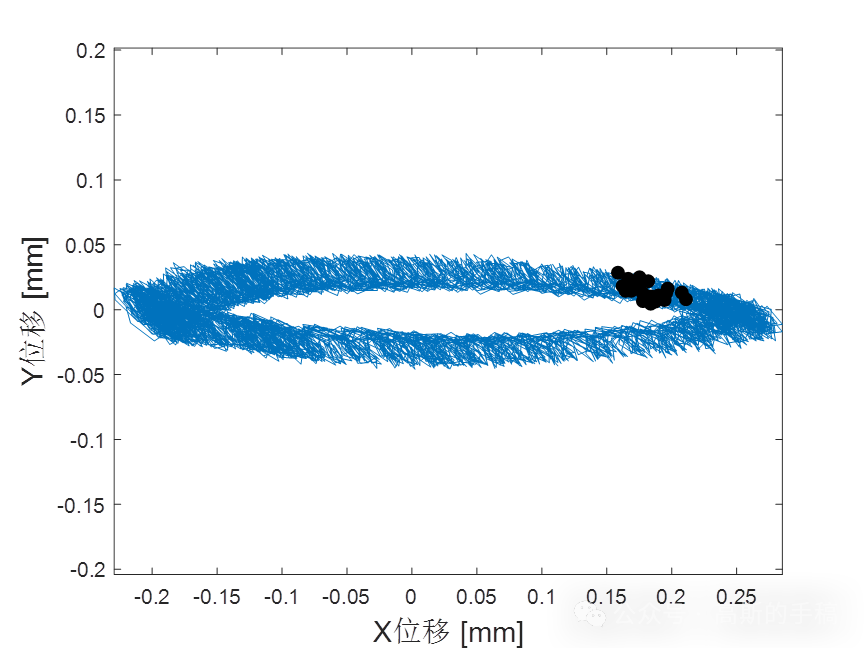
Etsi spectrum vibratio statum operantem unitatis magis intuenti exprimere potest, extractio spectri adhuc magnam vim processus signi requirit. Axis trajectoria magni momenti est repraesentatio vibrationis signum rotationis spiculi rotationis machinae. Figurae eius notae propinquae ad statum operantem unitatis sunt labes. Axis trajectoriae diagramma maxime synthesis ex notitia fluctus formarum a duobus sensoriis perpendicularis in rotoris directione radiali collectis. Acquisitio methodi trajectoria est relative simplex axem trajectoriam.
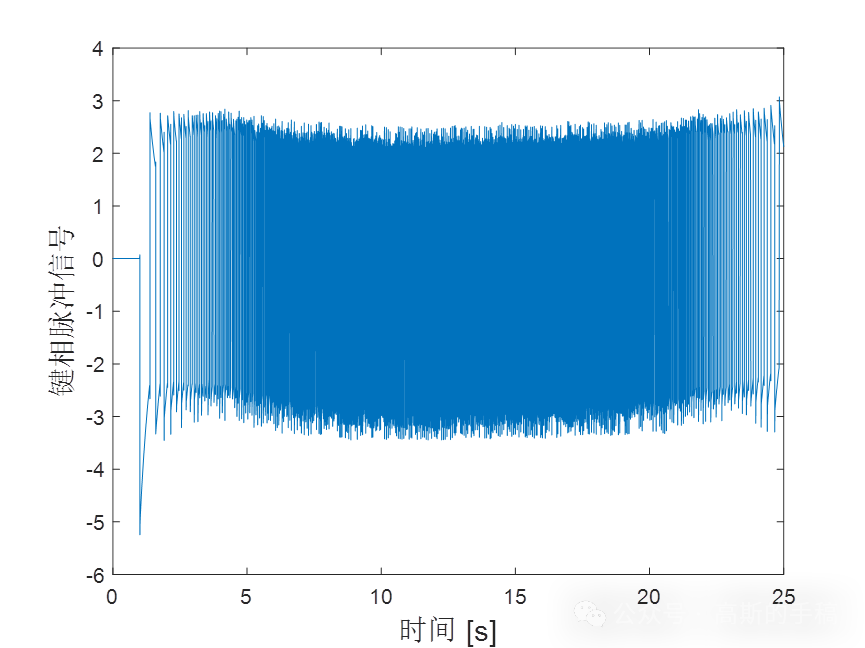
Axis trajectoria viam axis lineae ostendit, unum dimensivum temporis notitias ex duobus sensoriis orthogonalibus, coplanaribus sensoribus in duas dimensivas motus lateralis scapus rotoris. Utrum axi trajectoria eliquari oporteat secundum statum specificum. Versio cardo temporis insidias creatur a vestigio bus cum duobus XY temporis machinationibus ad insidias semita/tempus creandas. Tempus ditionis insidiae demonstratur ius vestigium insidiarum, et coniuratio Y supra X insidias est. Trajectoria / Tempus Domain insidias adhiberi potest ad constituendum tempus relationum notarum in axe trajectoriarum. Ob hoc, matlab trahere solebat axem trajectoriam machinae rotationis.
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
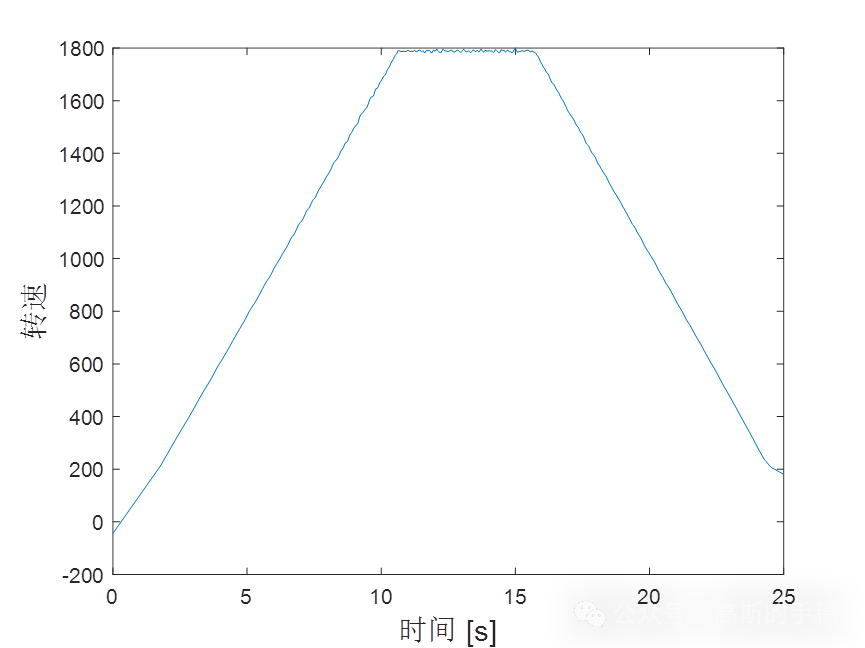
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
Areas peritia: moderni processus signum, apparatus doctrinarum, alta doctrina, gemelli digitalis, temporis series analysis, apparatus defectus deprehensio, instrumentum anomaliae deprehensio, armorum intellegentia culpa diagnosis et administratio salutis PHM, etc.

technologiae technologiae plus quam 30 annos operam dedit et in variis linguis proficit ut java, linux, javascript, php, css, etc. Multas contributiones in aperto fonte campo fecit elit documentorum statione ad communicandas quaestiones in technologia progressus ad futuram referentiam.

