
моя контактная информация
Почтамезофия@protonmail.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Из-за сильных шумовых помех от сигналов вибрации вращающегося оборудования точность методов диагностики неисправностей, которые непосредственно извлекают и выбирают характеристики данных вибрации, легко снижается из-за шума. В настоящее время технология диагностики неисправностей вращающегося оборудования на основе изображений быстро развивается. Для диагностики неисправностей вращающихся машин традиционные методы, как правило, извлекают характер вибрации из данных о вибрации. Характеристики изображения, полученные с помощью этого метода, интуитивно понятны и очевидны, что может в определенной степени обеспечить точность диагностики неисправностей в режиме реального времени.
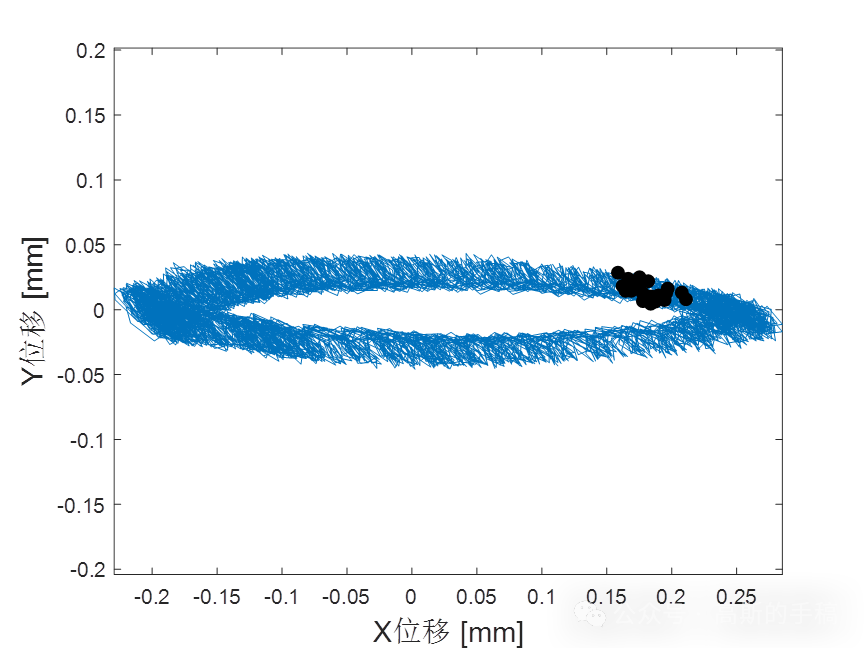
Хотя спектр вибрации может более интуитивно выражать рабочее состояние устройства, извлечение спектра по-прежнему требует большого объема обработки сигнала. Траектория оси является важным представлением сигнала вибрации вращающегося вала вращающегося оборудования. Ее характеристики формы тесно связаны с рабочим состоянием агрегата. В настоящее время многие ученые проводят извлечение, классификацию и идентификацию признаков для точной диагностики механических устройств. неисправности. Диаграмма траектории оси в основном синтезируется из данных формы сигнала, собранных двумя перпендикулярными датчиками в радиальном направлении ротора. Метод определения траектории относительно прост. Поэтому в последнее время было проведено много исследований по диагностике неисправностей вращающихся механизмов на основе. траектория оси.
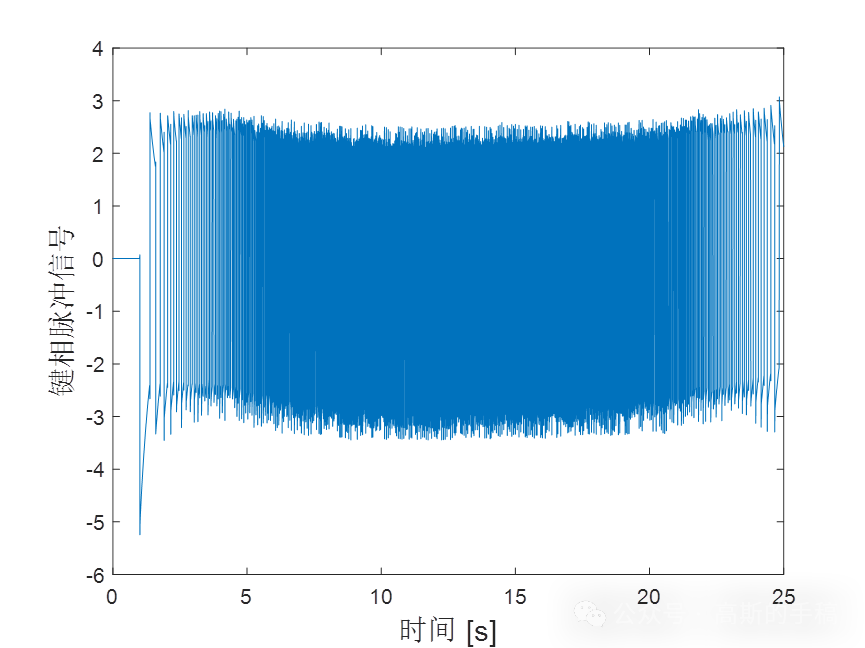
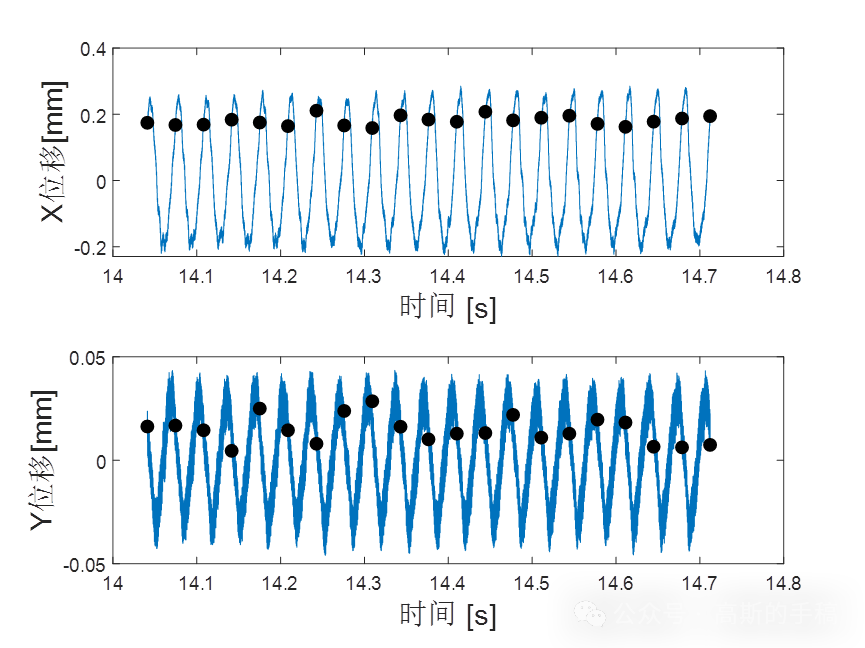
Траектория оси показывает путь оси, объединяя одномерную информацию во временной области от двух ортогональных копланарных датчиков в двумерную карту бокового движения вала ротора. Необходимость фильтрации траектории оси зависит от конкретной ситуации. Поворотный график трека/времени создается путем объединения одного трека с двумя временными графиками XY, используемыми для создания графика трека/времени. График во временной области показан справа от графика трассировки, а график Y находится над графиком X. График «Траектория/временная область» можно использовать для установления временной зависимости характеристик на траектории оси. В связи с этим для рисования траектории оси вращающегося оборудования используется Matlab.
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
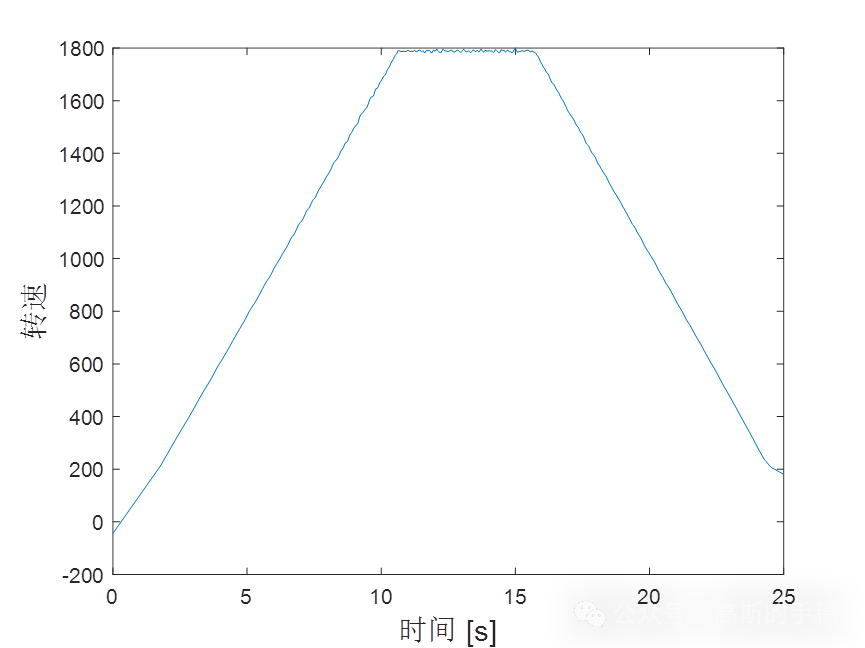
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
Области специализации: современная обработка сигналов, машинное обучение, глубокое обучение, цифровые двойники, анализ временных рядов, обнаружение дефектов оборудования, обнаружение аномалий оборудования, интеллектуальная диагностика неисправностей оборудования и управление работоспособностью PHM и т. д.

Он посвятил себя исследованию технологий более тридцати лет, владеет различными языками, такими как Java, Linux, Javascript, php, css и т. д., и внес большой вклад в созданную им область открытого исходного кода. станция документации для разработчиков, где можно поделиться некоторыми проблемами разработки технологий для дальнейшего использования.

Почтамезофия@protonmail.com