
τα στοιχεία επικοινωνίας μου
Ταχυδρομείο[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Λόγω της μεγάλης παρεμβολής θορύβου των κυματομορφών δόνησης περιστρεφόμενων μηχανημάτων, η ακρίβεια των μεθόδων διάγνωσης σφαλμάτων που εξάγουν και επιλέγουν άμεσα χαρακτηριστικά δεδομένων κραδασμών επηρεάζεται εύκολα από τον θόρυβο. Επί του παρόντος, η τεχνολογία διάγνωσης σφαλμάτων περιστρεφόμενων μηχανημάτων με βάση την εικόνα έχει αναπτυχθεί γρήγορα. Για τη διάγνωση σφαλμάτων περιστρεφόμενων μηχανημάτων, οι παραδοσιακές μέθοδοι τείνουν να εξάγουν μοτίβα δόνησης από δεδομένα κραδασμών.
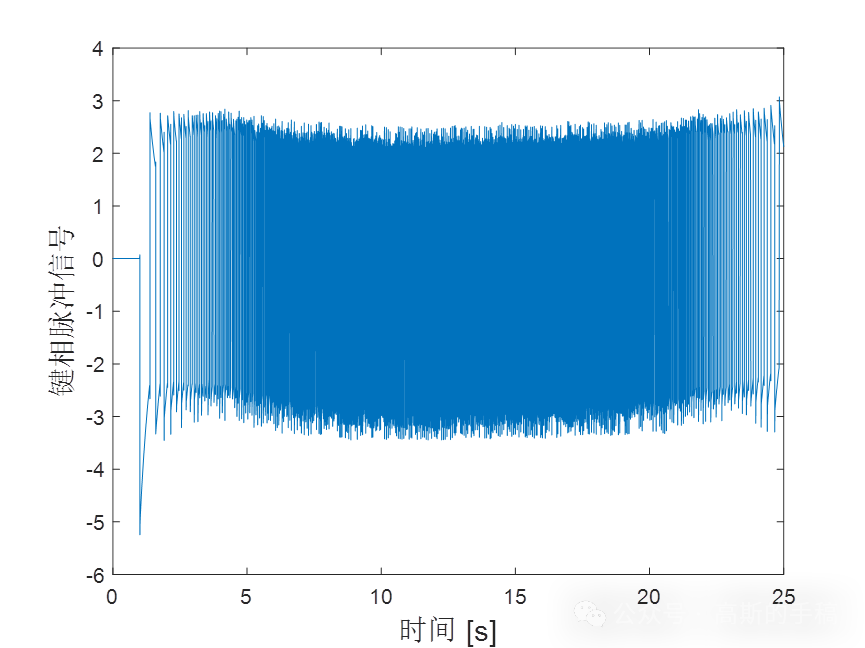
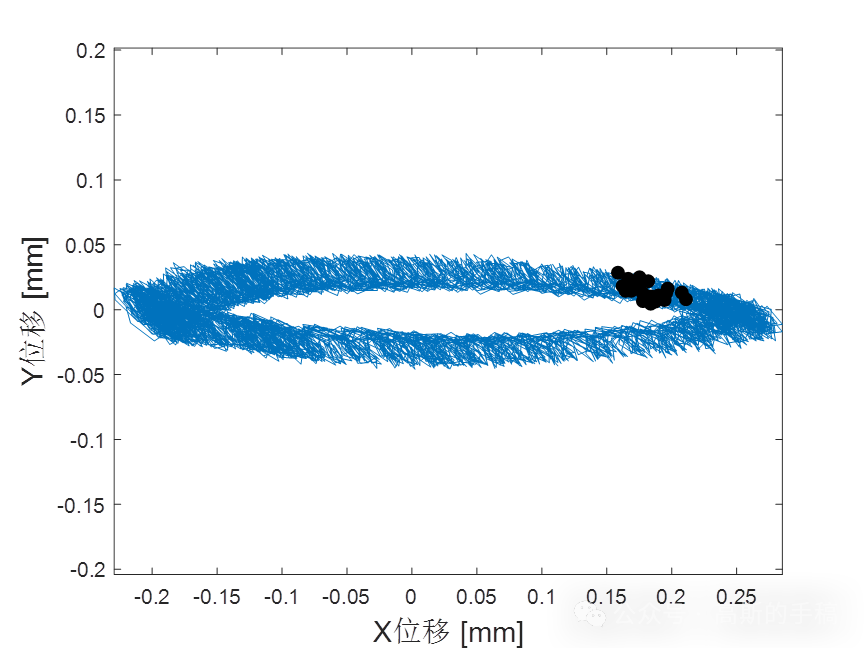
Αν και το φάσμα κραδασμών μπορεί να εκφράσει την κατάσταση λειτουργίας της μονάδας πιο διαισθητικά, η εξαγωγή του φάσματος εξακολουθεί να απαιτεί μεγάλη ποσότητα επεξεργασίας σήματος. Η τροχιά του άξονα είναι μια σημαντική αναπαράσταση του σήματος δόνησης του περιστρεφόμενου άξονα του περιστρεφόμενου μηχανήματος. ελαττώματα. Το διάγραμμα τροχιάς του άξονα συντίθεται κυρίως από τα δεδομένα κυματομορφής που συλλέγονται από δύο κάθετους αισθητήρες στην ακτινική κατεύθυνση του ρότορα τροχιά άξονα.
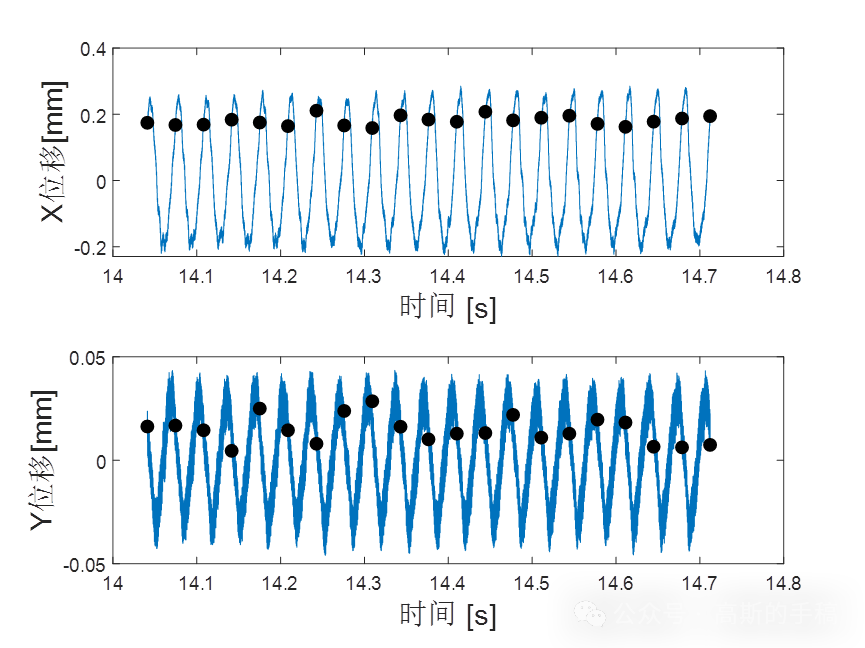
Η τροχιά του άξονα δείχνει τη διαδρομή της γραμμής του άξονα, συνδυάζοντας τις μονοδιάστατες πληροφορίες πεδίου χρόνου από δύο ορθογώνιους, ομοεπίπεδους αισθητήρες σε έναν δισδιάστατο χάρτη της πλευρικής κίνησης του άξονα του δρομέα. Το αν η τροχιά του άξονα πρέπει να φιλτραριστεί εξαρτάται από τη συγκεκριμένη κατάσταση. Η γραφική παράσταση συγκεντρωτικής διαδρομής/χρόνου δημιουργείται με τη συγχώνευση ενός κομματιού με τα δύο χρονικά διαγράμματα XY που χρησιμοποιούνται για τη δημιουργία του σχεδίου διαδρομής/χρόνου. Η γραφική παράσταση του πεδίου χρόνου εμφανίζεται στα δεξιά της γραφικής παράστασης ίχνους και η γραφική παράσταση Y βρίσκεται πάνω από την γραφική παράσταση Χ. Η γραφική παράσταση Trajectory/Time Domain μπορεί να χρησιμοποιηθεί για τον καθορισμό της χρονικής σχέσης των χαρακτηριστικών στην τροχιά του άξονα. Ενόψει αυτού, το matlab χρησιμοποιείται για να χαράξει την τροχιά του άξονα του περιστρεφόμενου μηχανήματος.
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
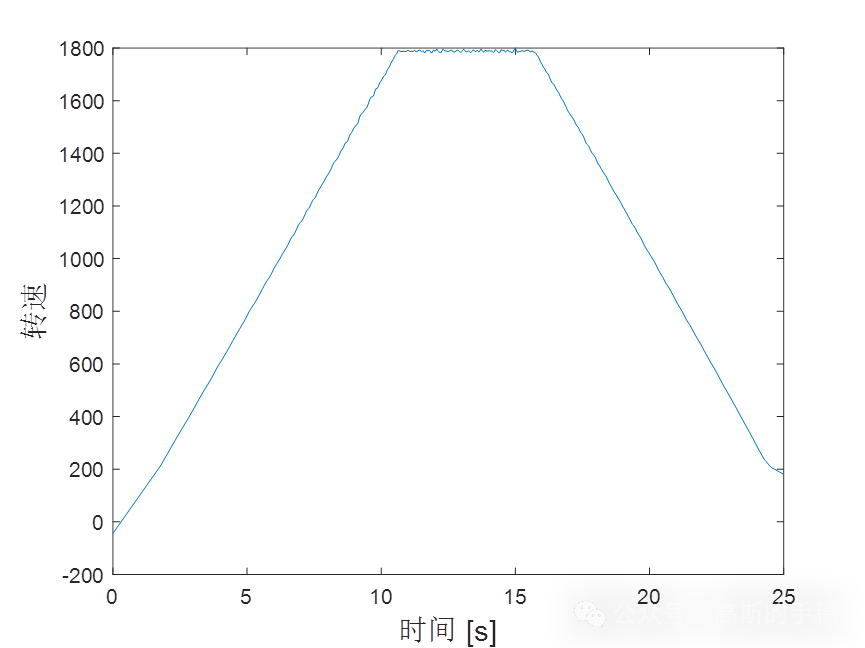
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
Τομείς εξειδίκευσης: σύγχρονη επεξεργασία σήματος, μηχανική μάθηση, βαθιά μάθηση, ψηφιακά δίδυμα, ανάλυση χρονοσειρών, ανίχνευση ελαττωμάτων εξοπλισμού, ανίχνευση ανωμαλιών εξοπλισμού, έξυπνη διάγνωση σφαλμάτων εξοπλισμού και διαχείριση υγείας PHM κ.λπ.

Έχει αφοσιωθεί στην έρευνα της τεχνολογίας για περισσότερα από 30 χρόνια και είναι ικανός σε διάφορες γλώσσες όπως java, linux, javascript, php, css κ.λπ. Έχει κάνει πολλές συνεισφορές στον τομέα του ανοιχτού κώδικα σταθμός τεκμηρίωσης προγραμματιστή για να μοιραστείτε ορισμένα ζητήματα στην ανάπτυξη τεχνολογίας για μελλοντική αναφορά

Ταχυδρομείο[email protected]