
내 연락처 정보
우편메소피아@프로톤메일.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
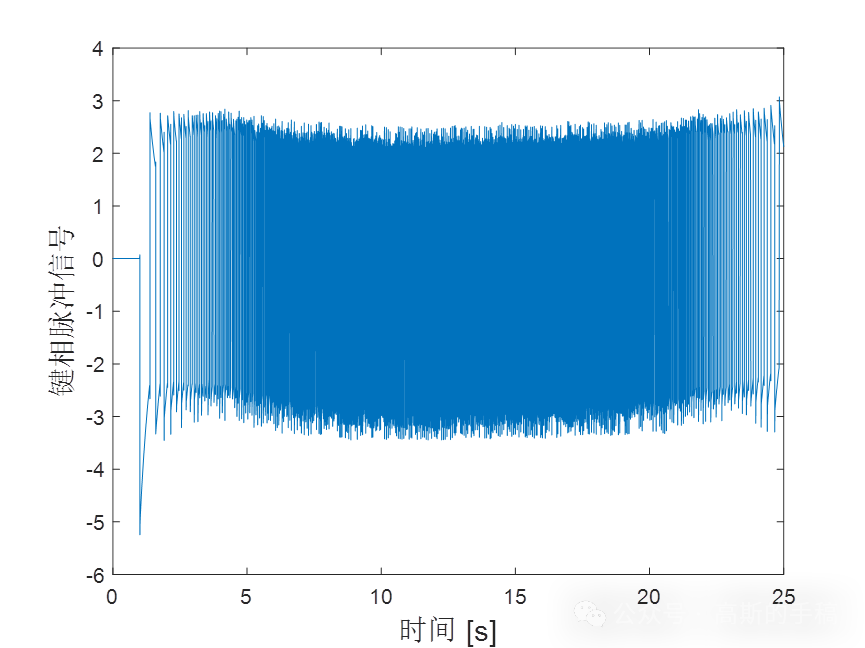
회전하는 기계 진동 파형의 큰 소음 간섭으로 인해 진동 데이터 특징을 직접 추출하고 선택하는 결함 진단 방법의 정확도는 소음에 의해 쉽게 영향을 받습니다. 현재 영상 기반 회전기계 고장진단 기술은 급속도로 발전하고 있다. 회전 기계의 결함 진단을 위해 기존 방법은 진동 데이터에서 진동 패턴을 추출하는 경향이 있습니다. 이 방법으로 추출된 이미지 특징은 직관적이고 명확하므로 어느 정도 결함 진단의 실시간성과 정확성을 보장할 수 있습니다.
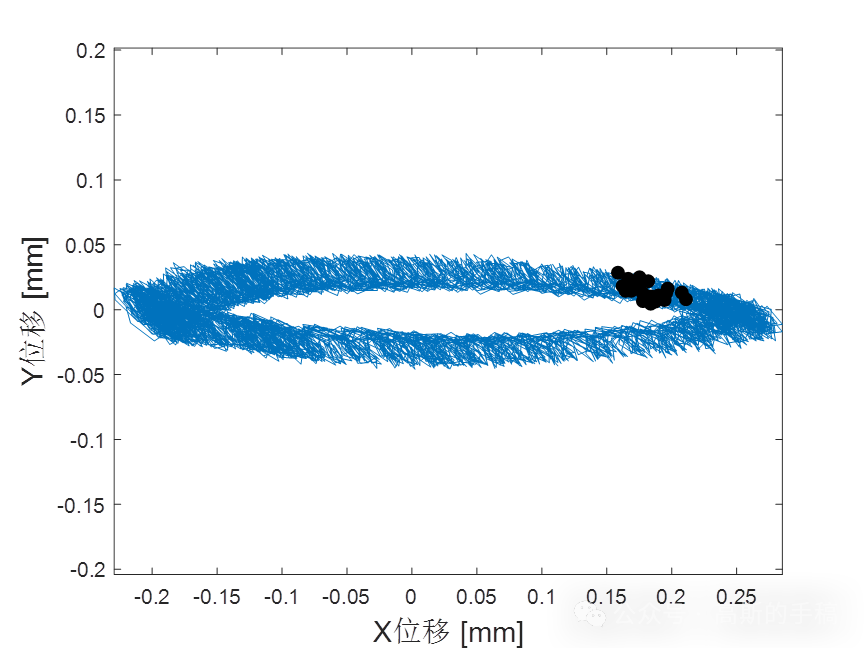
진동 스펙트럼을 이용하면 장치의 작동 상태를 보다 직관적으로 표현할 수 있지만, 스펙트럼을 추출하려면 여전히 많은 양의 신호 처리가 필요합니다. 회전하는 기계의 회전축 진동 신호의 중요한 표현 형태로서 축 궤적의 형상 특성은 장치의 작동 상태와 밀접한 관련이 있으며 현재 많은 학자들이 정확한 특징 추출 및 분류 식별을 수행해 왔습니다. 기계적 결함을 진단합니다. 축 궤적 다이어그램은 주로 회전자의 반경 방향에 있는 두 개의 수직 센서에 의해 수집된 파형 데이터로부터 합성됩니다. 따라서 궤적 획득 방법은 비교적 간단합니다. 축 궤적.
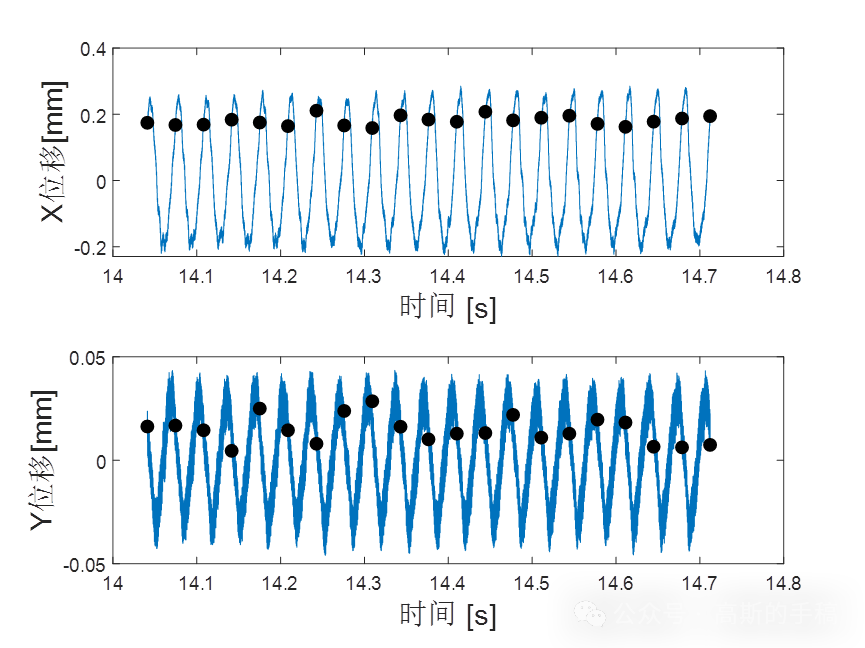
축 궤적은 두 직교 동일 평면 센서의 1차원 시간 영역 정보를 로터 샤프트의 측면 운동에 대한 2차원 맵으로 결합하여 축 선의 경로를 보여줍니다. 축 궤적을 필터링해야 하는지 여부는 특정 상황에 따라 다릅니다. 피벗 트랙/시간 플롯은 트랙/시간 플롯을 생성하는 데 사용된 두 개의 XY 시간 플롯과 트랙을 병합하여 생성됩니다. 시간 영역 플롯은 추적 플롯 오른쪽에 표시되고 Y 플롯은 X 플롯 위에 있습니다. 궤적/시간 영역 플롯은 축 궤적에 대한 특성의 시간 관계를 설정하는 데 사용할 수 있습니다. 이를 고려하여 회전 기계의 축 궤적을 그리는 데 MATLAB이 사용됩니다.
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
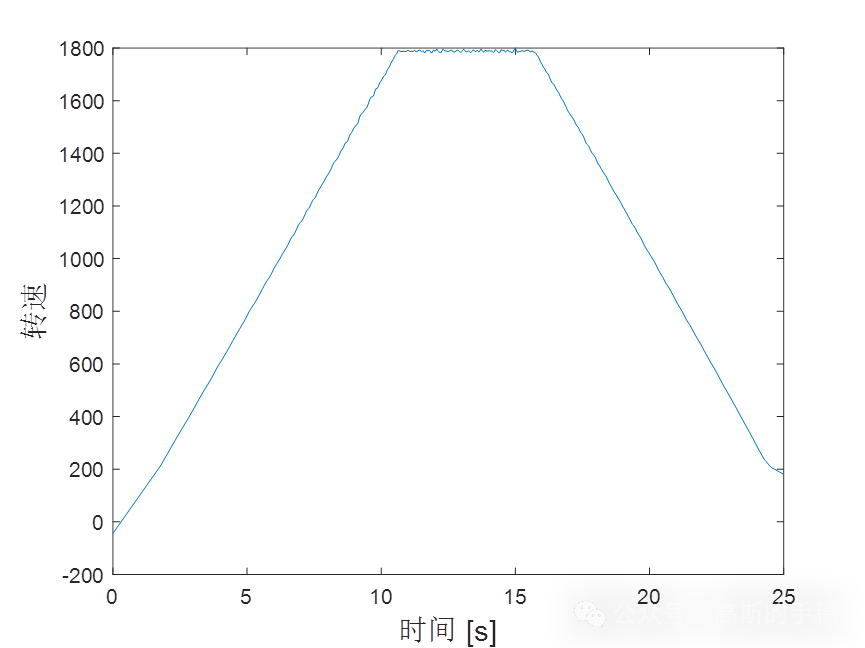
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
전문 분야: 현대 신호 처리, 기계 학습, 딥 러닝, 디지털 트윈, 시계열 분석, 장비 결함 감지, 장비 이상 감지, 장비 지능형 결함 진단 및 상태 관리 PHM 등

그는 30년 넘게 기술 연구에 전념해 왔으며, java, linux, javascript, php, css 등 다양한 언어에 능숙하며, 오픈소스 분야에 많은 공헌을 해왔습니다. 나중에 참조할 수 있도록 기술 개발의 일부 문제를 공유하는 개발자 문서 스테이션입니다.

우편메소피아@프로톤메일.com