
minhas informações de contato
Correspondência[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Devido à grande interferência de ruído das formas de onda de vibração de máquinas rotativas, a precisão dos métodos de diagnóstico de falhas que extraem e selecionam diretamente os recursos dos dados de vibração é facilmente afetada pelo ruído. Atualmente, a tecnologia de diagnóstico de falhas em máquinas rotativas baseada em imagens desenvolveu-se rapidamente. Para o diagnóstico de falhas de máquinas rotativas, os métodos tradicionais tendem a extrair padrões de vibração dos dados de vibração. As características da imagem extraídas por este método são intuitivas e óbvias, o que pode garantir até certo ponto o tempo real e a precisão do diagnóstico de falhas.
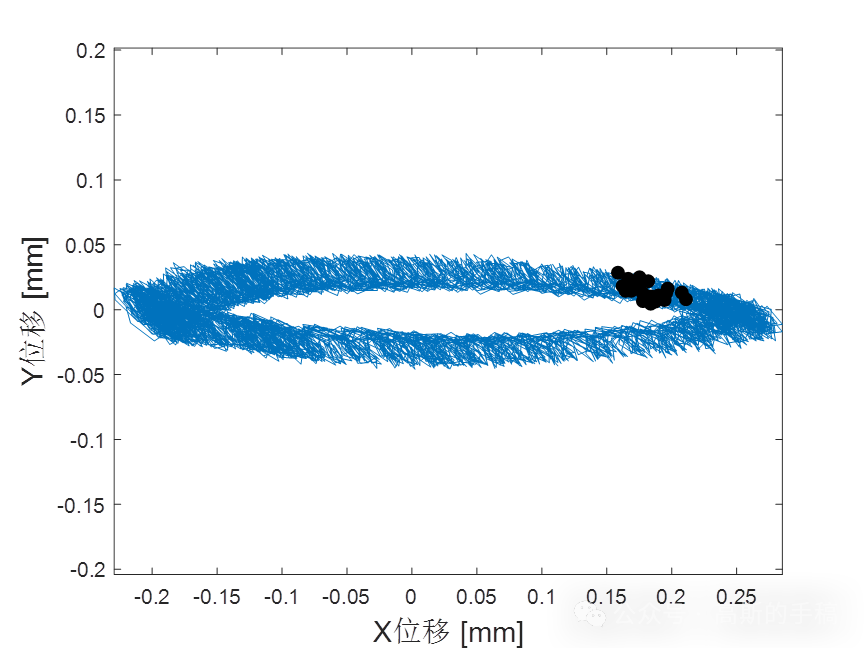
Embora o espectro de vibração possa expressar o estado operacional da unidade de forma mais intuitiva, a extração do espectro ainda requer uma grande quantidade de processamento de sinal. Como uma importante forma de representação do sinal de vibração do eixo rotativo de máquinas rotativas, as características da forma da trajetória do eixo estão intimamente relacionadas ao status operacional da unidade. Atualmente, muitos estudiosos realizaram a extração de características e a identificação da classificação com precisão. diagnosticar falhas mecânicas. O diagrama de trajetória do eixo é sintetizado principalmente a partir dos dados de forma de onda coletados por dois sensores perpendiculares na direção radial do rotor. O método de aquisição de trajetória é relativamente simples. Portanto, tem havido muitos estudos recentemente para implementar o diagnóstico de falhas de máquinas rotativas com base no. trajetória do eixo.
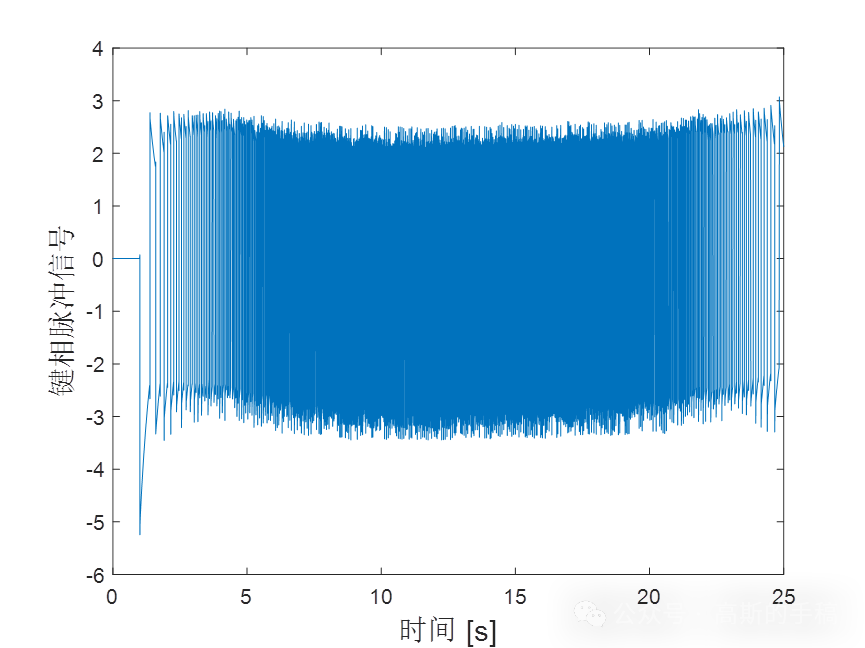
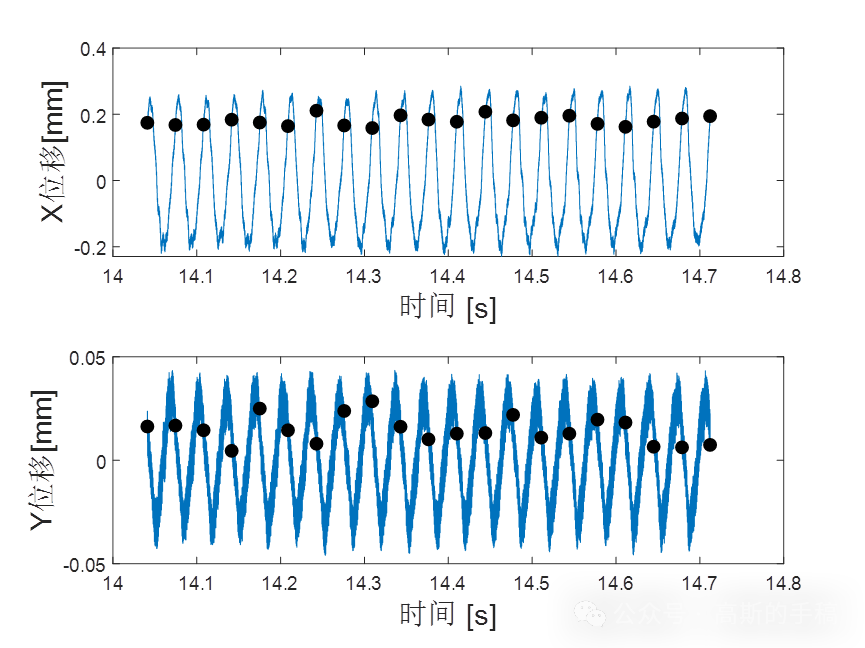
A trajetória do eixo mostra o caminho da linha do eixo, combinando as informações unidimensionais no domínio do tempo de dois sensores coplanares ortogonais em um mapa bidimensional do movimento lateral do eixo do rotor. Se a trajetória do eixo precisa ser filtrada depende da situação específica. O gráfico pivô de trilha/tempo é criado mesclando uma trilha com os dois gráficos de tempo XY usados para criar o gráfico de trilha/tempo. O gráfico no domínio do tempo é mostrado à direita do gráfico de rastreamento e o gráfico Y está acima do gráfico X. O gráfico Trajetória/Domínio do Tempo pode ser usado para estabelecer a relação temporal das características na trajetória do eixo. Diante disso, o matlab é utilizado para desenhar a trajetória do eixo da máquina rotativa.
- y = sign(tacho-triglevel);
- dy = diff(y);
- tt = maketime(dy,fs);
- if slope>0;yt = tt(find(dy>1.5));end
- if slope<0;yt = tt(find(dy<1.5));end
- dy = diff(yt);
- dy(length(dy)+1) = dy(length(dy));
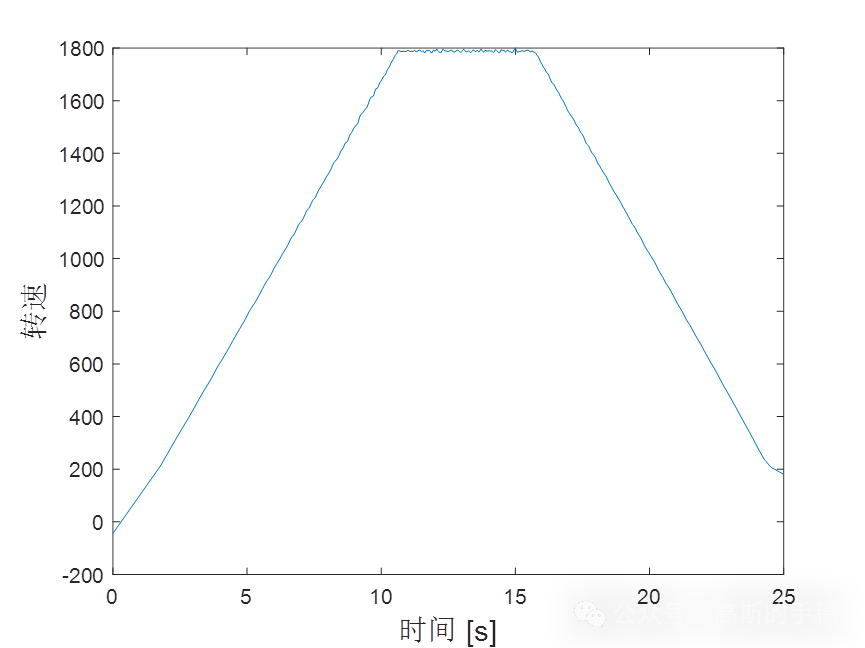
- rpm = 60/ppr*ones(size(dy))./dy;
- b = [.25 .5 .25];
- a = 1;
- rpm = filtfilt(b,a,rpm);
- idx=find(~isnan(rpm));
- rpm=rpm(idx);
- yt=yt(idx);
- N = max(tt)*newfs+2;
- trpm = linspace(0,max(tt),N);
- trpm = trpm(:);
- %pause
- rpm = interp1(yt,rpm,trpm,'linear','extrap'); %interp1(yt,rpm,trpm);
- rpm = rpm(:);
- 完整数据和代码通过知乎学术咨询获得:
- https://www.zhihu.com/consult/people/792359672131756032?isMe=1
Áreas de especialização: processamento moderno de sinais, aprendizado de máquina, aprendizado profundo, gêmeos digitais, análise de séries temporais, detecção de defeitos em equipamentos, detecção de anomalias em equipamentos, diagnóstico inteligente de falhas em equipamentos e gerenciamento de saúde PHM, etc.

Ele se dedica à pesquisa de tecnologia há mais de 30 anos e é proficiente em diversas linguagens como java, linux, javascript, php, css, etc. estação de documentação do desenvolvedor para compartilhar alguns problemas no desenvolvimento de tecnologia para referência futura.

Correspondência[email protected]