2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Eine Optimierungslösung mit mehreren Zielen für die UAV-Pfadplanung ist ein komplexer Prozess, der die Berücksichtigung mehrerer Ziele und die Anwendung von Optimierungsalgorithmen umfasst. Hier finden Sie eine Übersicht über einige wichtige Punkte und zugehörige Algorithmen:
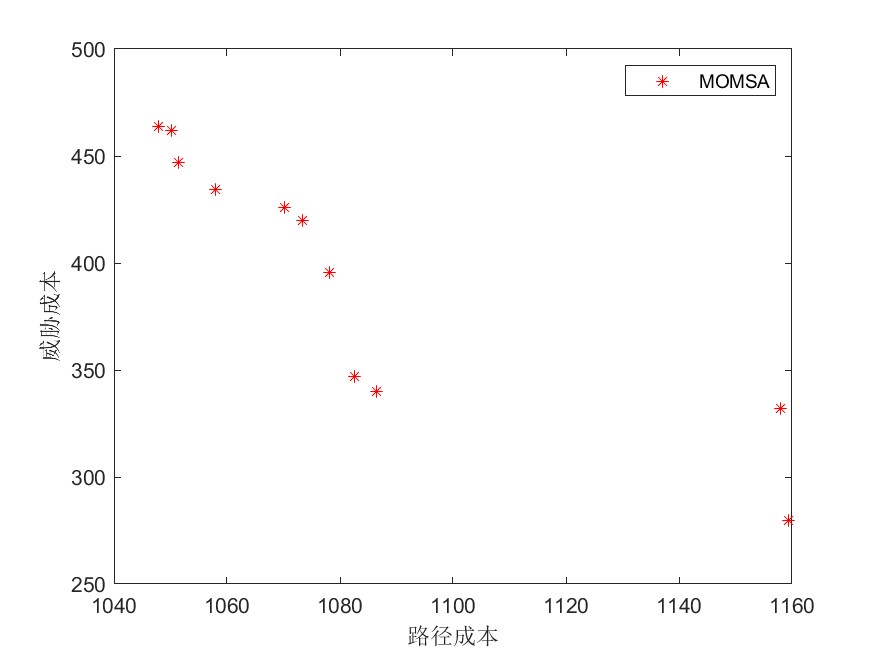
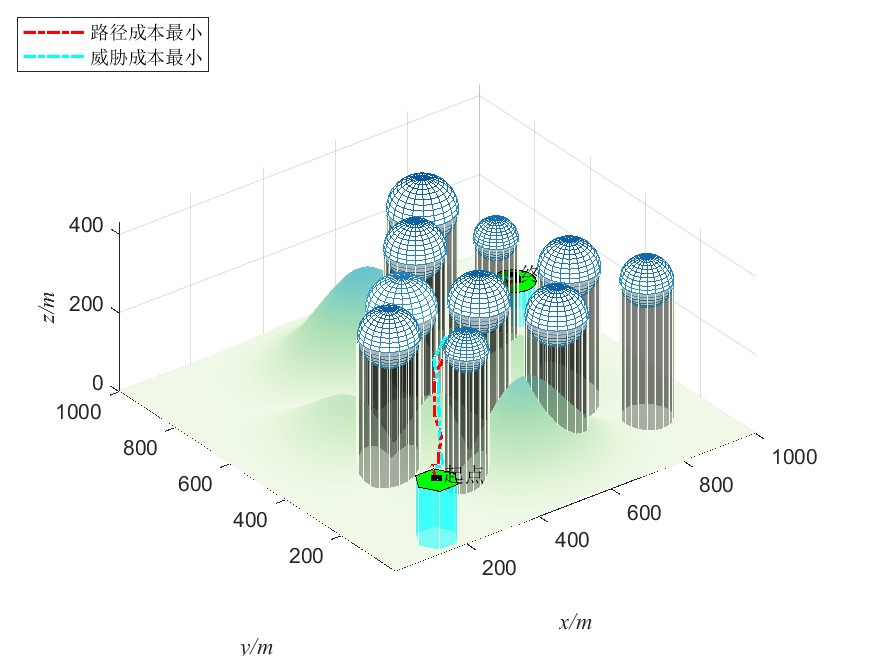
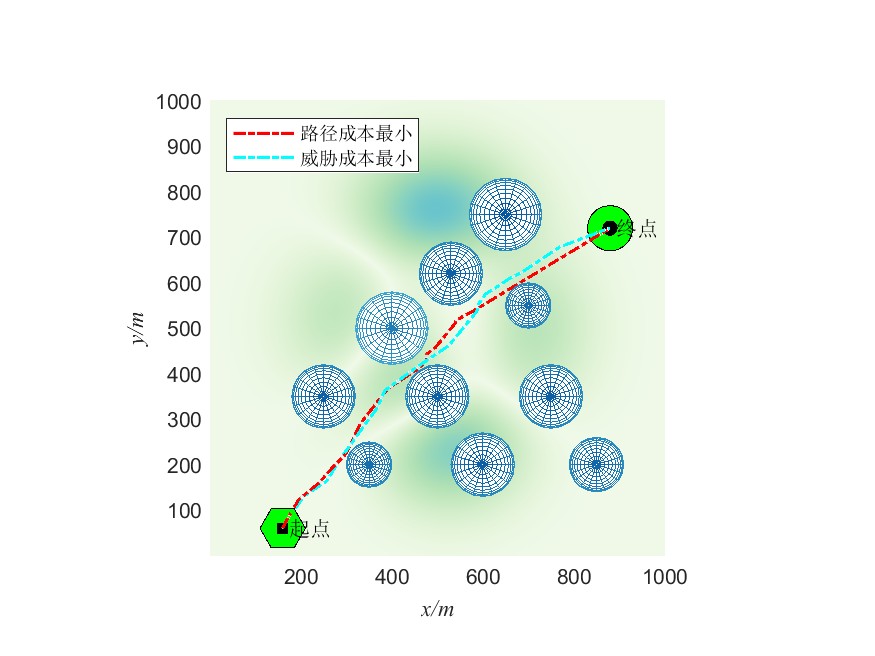
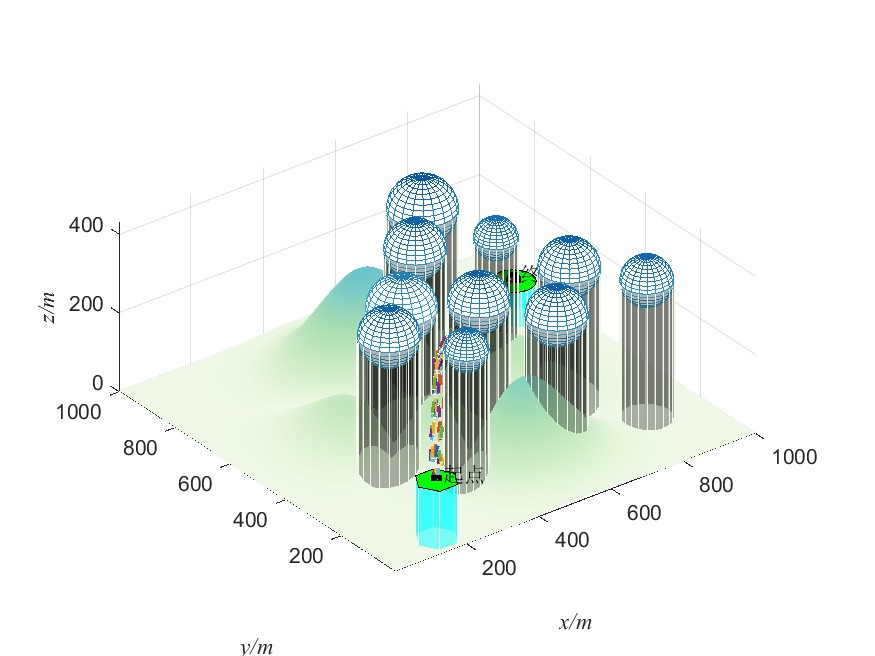
1. **Strategie zur Optimierung mehrerer Ziele**: Bei der UAV-Pfadplanung müssen mehrere Ziele gleichzeitig berücksichtigt werden, wie z. B. Pfadlänge, Sicherheit, Flugzeit und dynamische Einschränkungen. Die Optimierung dieser Ziele kann Drohnen dabei helfen, optimale Wege in komplexen Umgebungen zu finden.
2. **Heuristischer Suchalgorithmus**: Für die UAV-Pfadplanung wurden herkömmliche heuristische Suchalgorithmen wie der A*-Algorithmus verwendet. Allerdings können diese Algorithmen in komplexen Umgebungen vor Herausforderungen hinsichtlich Effizienz und Konvergenzgeschwindigkeit stehen.
3. **Metaheuristischer Algorithmus**: Um das Problem der Pfadoptimierung zu lösen, haben Forscher verbesserte heuristische Algorithmen übernommen, wie z. B. die Partikelschwarmoptimierung (PSO), der genetische Algorithmus (GA) und der Gray-Wolf-Optimierer (GWO). Diese Algorithmen funktionieren gut darin, komplexe kombinatorische Optimierungsprobleme zu lösen.
4. **Auf maschinellem Lernen basierende Methoden**: Deep-Learning- und Reinforcement-Learning-Methoden werden auch auf die Flugbahnplanung von Drohnen angewendet, sodass Drohnen aus Sensordaten lernen und sich an komplexe Umgebungen anpassen können.
5. **Kollaborative Planung mit mehreren Agenten**: In Multi-UAV-Systemen ist die kollaborative Planung besonders wichtig. Dazu gehören Aufgabenzuweisung, Pfadplanung und gemeinsame Entscheidungsfindung, um die Zusammenarbeit und gemeinsame Nutzung von Ressourcen zwischen Drohnen sicherzustellen.
6. **Hochpräzise Karten- und Sensorfusion**: Durch die Kombination hochpräziser Kartendaten und Sensordaten wie GPS, Lidar und Kameras kann die Genauigkeit der Drohnennavigation verbessert und an dynamische Umgebungen angepasst werden.
7. **Anpassbarkeit an dynamische Umgebungen**: UAV-Pfadplanungsalgorithmen müssen in der Lage sein, Umweltveränderungen in Echtzeit wahrzunehmen und sich daran anzupassen, um mit Änderungen bei dynamischen Hindernissen und meteorologischen Bedingungen zurechtzukommen.
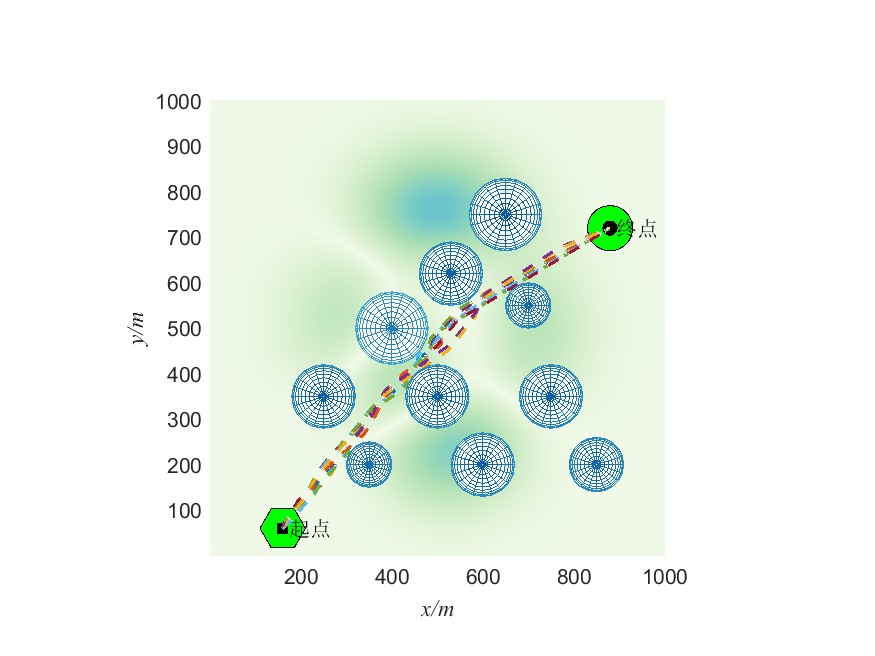
8. **Multiobjektiver Partikelschwarmoptimierungsalgorithmus basierend auf Navigationsvariablen (NMOPSO)**: Dies ist ein Algorithmus zur Planung von UAV-Hindernisvermeidungswegen in komplexen Bergumgebungen. Er verwendet Navigationsvariablen, um die Fluglage des UAV zu beschreiben. und finden Sie sichere und effiziente Wege durch Multi-Objective-Optimierungstechnologie.
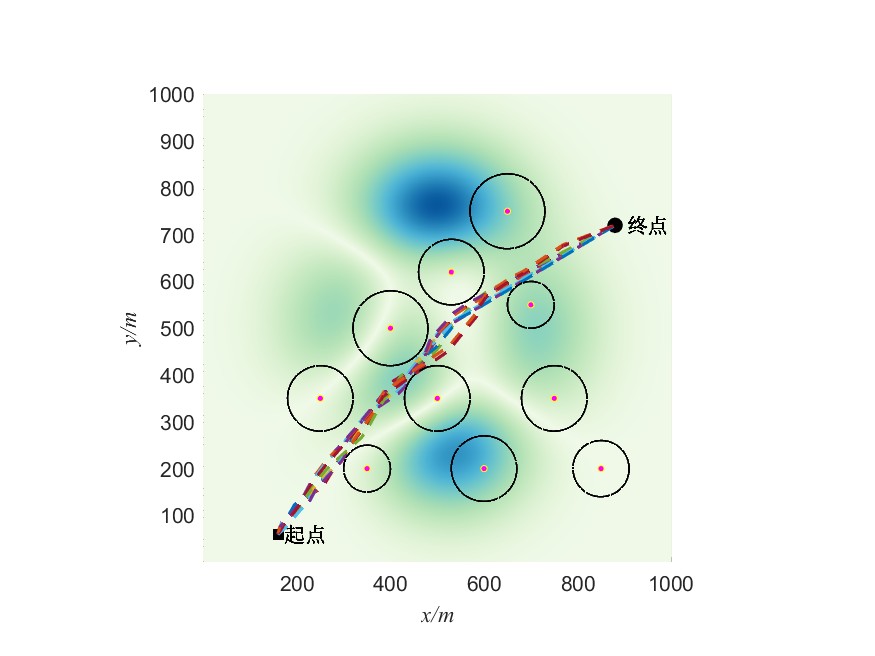
9. **Multi-Ziel-Optimierungsstrategie unter Berücksichtigung sicherer Flugkanalbeschränkungen**: In komplexen Umgebungen, wie etwa unterirdischen Kohlebergwerken, ist die Optimierung sicherer Flugkanäle und Flugbahnen von entscheidender Bedeutung, um die Flugsicherheit von UAVs zu gewährleisten. Der vorgeschlagene Algorithmus generiert eine Flugbahn mit besserer Gesamtleistung, indem er den Normalenvektor der Halbebene im Prozess der Generierung eines sicheren Flugkanals anpasst und Mehrzielfunktionen verwendet, um die Leistungsindikatoren der UAV-Flugbahn zu modellieren und zu optimieren.
Durch die umfassende Anwendung dieser Methoden und Algorithmen können multiobjektive Optimierungslösungen für die UAV-Pfadplanung die Effizienz und Effektivität der Pfadplanung verbessern und gleichzeitig die Sicherheit gewährleisten. Zukünftige Forschung wird die Entwicklung von Algorithmen zur Anpassung an komplexere und dynamischere Umgebungen weiter vorantreiben.


Er widmet sich seit mehr als 30 Jahren der Technologieforschung und beherrscht verschiedene Sprachen wie Java, Linux, Javascript, PHP, CSS usw. Er hat viele Beiträge im Open-Source-Bereich geleistet Entwicklerdokumentationsstation, um einige Themen in der Technologieentwicklung als zukünftige Referenz zu teilen
