私の連絡先情報
郵便メール:
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
UAV の経路計画のための多目的最適化ソリューションは、複数の目的の考慮と最適化アルゴリズムの適用を含む複雑なプロセスです。ここでは、いくつかの重要なポイントと関連するアルゴリズムの概要を示します。
1. **多目的最適化戦略**: UAV の経路計画では、経路の長さ、安全性、飛行時間、動的制約などの複数の目的を同時に考慮する必要があります。これらの目標を最適化することで、ドローンが複雑な環境で最適な経路を見つけるのに役立ちます。
2. **ヒューリスティック検索アルゴリズム**: A* アルゴリズムなどの従来のヒューリスティック検索アルゴリズムは、UAV の経路計画に使用されてきました。ただし、これらのアルゴリズムは、複雑な環境では効率と収束速度の課題に直面する可能性があります。
3. **メタヒューリスティック アルゴリズム**: 経路最適化問題を解決するために、研究者は粒子群最適化 (PSO)、遺伝的アルゴリズム (GA)、ハイイロ オオカミ オプティマイザー (GWO) などの改良されたヒューリスティック アルゴリズムを採用しました。複雑な組み合わせ最適化問題の解決に優れています。
4. **機械学習ベースの手法**: 深層学習および強化学習手法はドローンの経路計画にも適用され、ドローンがセンサー データから学習して複雑な環境に適応できるようになります。
5. **マルチエージェントの協調計画**: マルチ UAV システムでは、協調計画が特に重要です。これには、ドローン間の協力とリソースの共有を確保するためのタスクの割り当て、経路計画、協調的な意思決定が含まれます。
6. **高精度地図とセンサーの融合**: 高精度地図データと GPS、LIDAR、カメラなどのセンサー データを組み合わせることで、ドローン ナビゲーションの精度を向上させ、動的な環境に適応できます。
7. **動的な環境適応性**: UAV の経路計画アルゴリズムは、動的な障害物や気象条件の変化に対処するために、環境の変化をリアルタイムで認識して適応する能力を備えている必要があります。
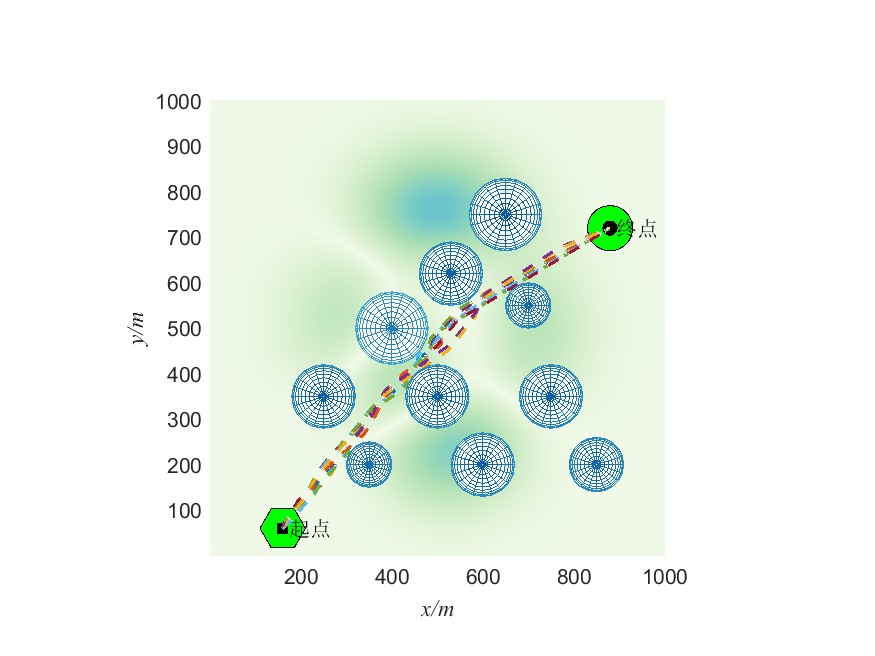
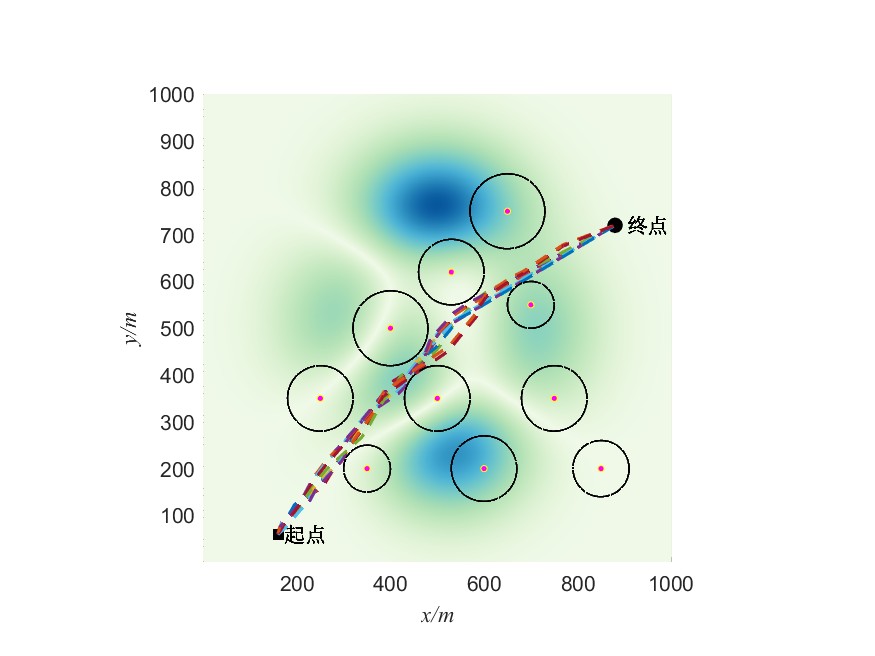
8. **ナビゲーション変数に基づく多目的粒子群最適化アルゴリズム (NMOPSO)**: これは、複雑な山岳環境における UAV の障害物回避経路計画のためのアルゴリズムであり、ナビゲーション変数を使用して UAV の飛行姿勢を記述します。多目的最適化テクノロジーを通じて安全で効率的なパスを見つけます。
9. **安全な飛行経路の制約を考慮した多目的最適化戦略**: 地下炭鉱などの複雑な環境では、安全な飛行経路と飛行軌道を最適化することが、UAV の飛行の安全性を確保するために重要です。提案されたアルゴリズムは、安全な飛行経路を生成する過程で半平面法線ベクトルを調整し、多目的関数を使用して UAV 軌道の性能指標をモデル化および最適化することにより、より優れた総合的なパフォーマンスを備えた飛行軌道を生成します。
これらの方法とアルゴリズムを包括的に適用することで、UAV 経路計画の多目的最適化ソリューションは、安全性を確保しながら経路計画の効率と有効性を向上させることができます。今後の研究は、より複雑で動的な環境に適応するアルゴリズムの開発を推進し続けるでしょう。
(1) UAV の 3 次元経路計画を解決するための多目的カマキリ探索アルゴリズム (MOMSA) (MATLAB コード) - CSDN ブログ
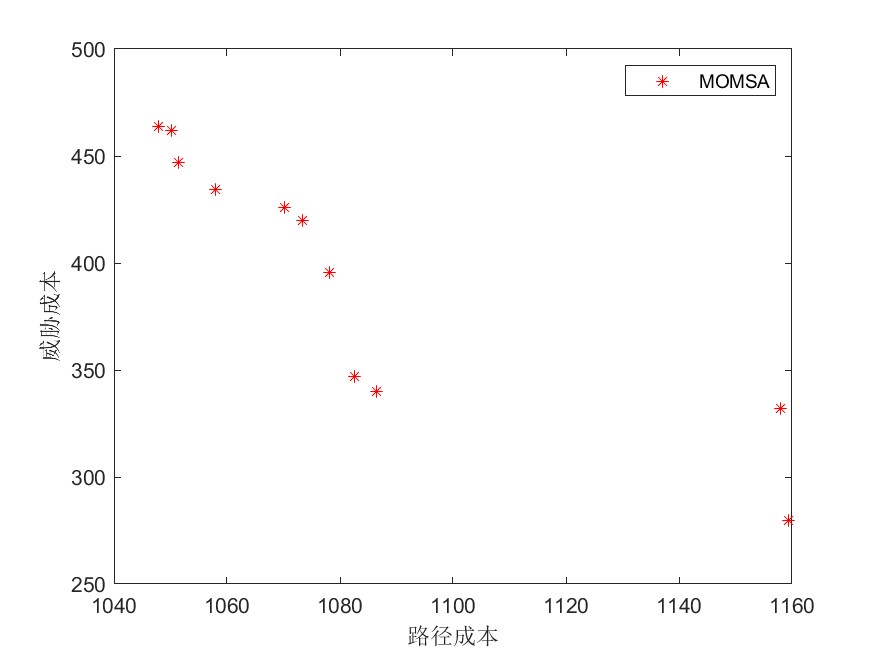
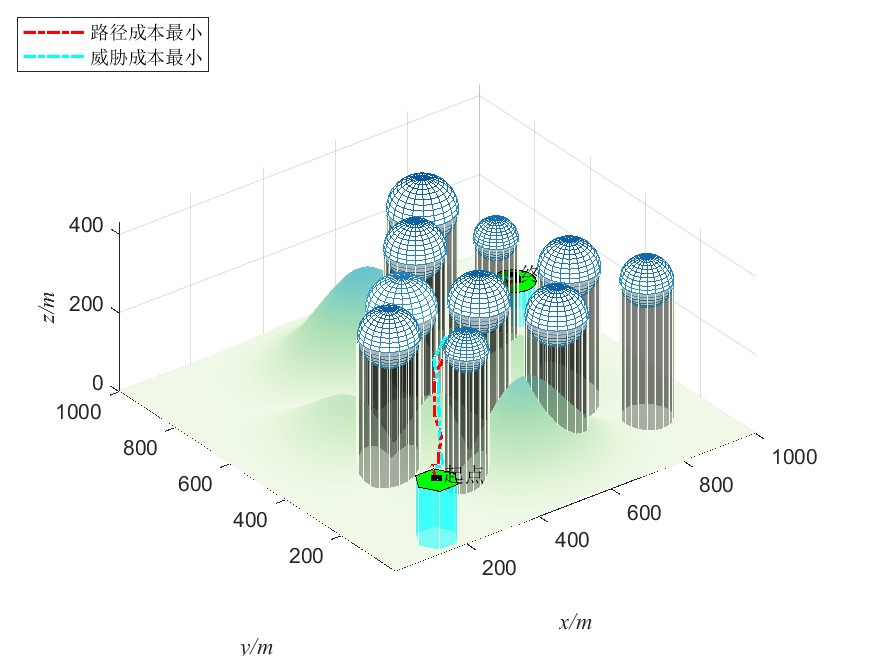
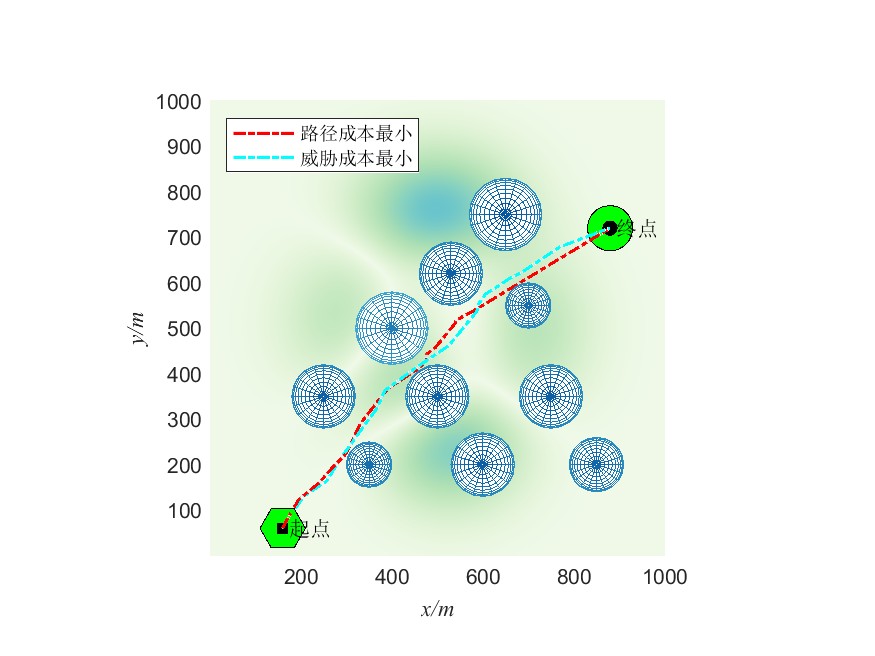

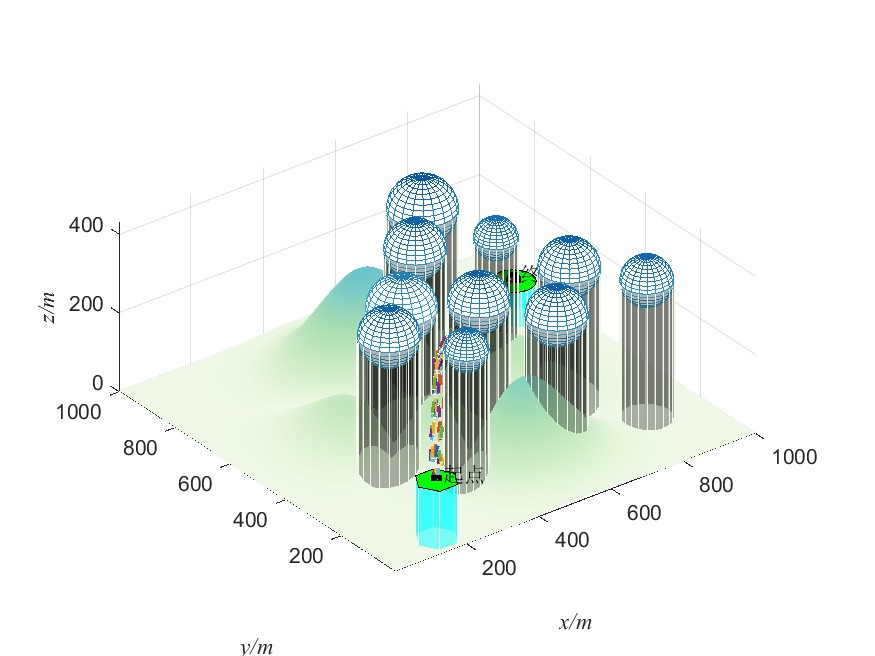
(2) 多目的カマキリ探索アルゴリズム MOMSA は、ドローンの 3 次元経路計画を解決し、障害物の位置を自ら変更できます (MATLAB コード)
(1) 多目的カマキリ探索アルゴリズム MOMSA は、ドローンの 3 次元経路計画を解決し、障害物の位置を自身で変更できます (MATLAB コード)
多目的アプリケーション: 多目的カマキリ探索アルゴリズム MOMSA は、UAV の 3 次元経路計画を解決し、障害物の位置をそれ自体で変更できます (MATLAB コード)

彼は 30 年以上テクノロジーの研究に専念しており、Java、Linux、JavaScript、PHP、CSS などのさまざまな言語に堪能であり、オープンソース分野で多くの貢献を行っています。将来の参考のために技術開発におけるいくつかの問題を共有する開発者ドキュメント ステーション。

郵便メール: