2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
UAV-polun suunnittelun usean tavoitteen optimointiratkaisu on monimutkainen prosessi, joka sisältää useiden tavoitteiden huomioimisen ja optimointialgoritmien soveltamisen. Tässä on yleiskatsaus joihinkin avainkohtiin ja niihin liittyviin algoritmeihin:
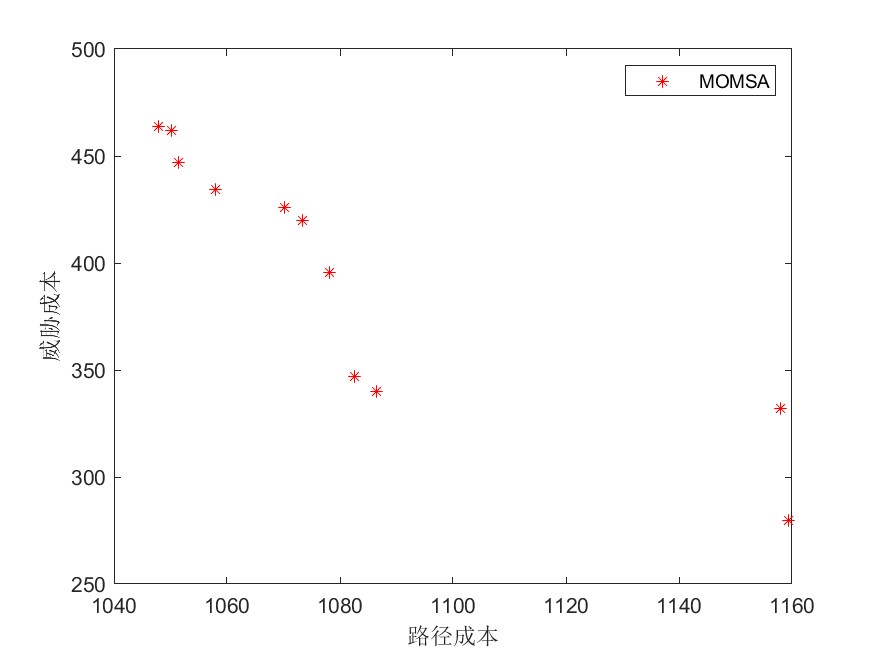
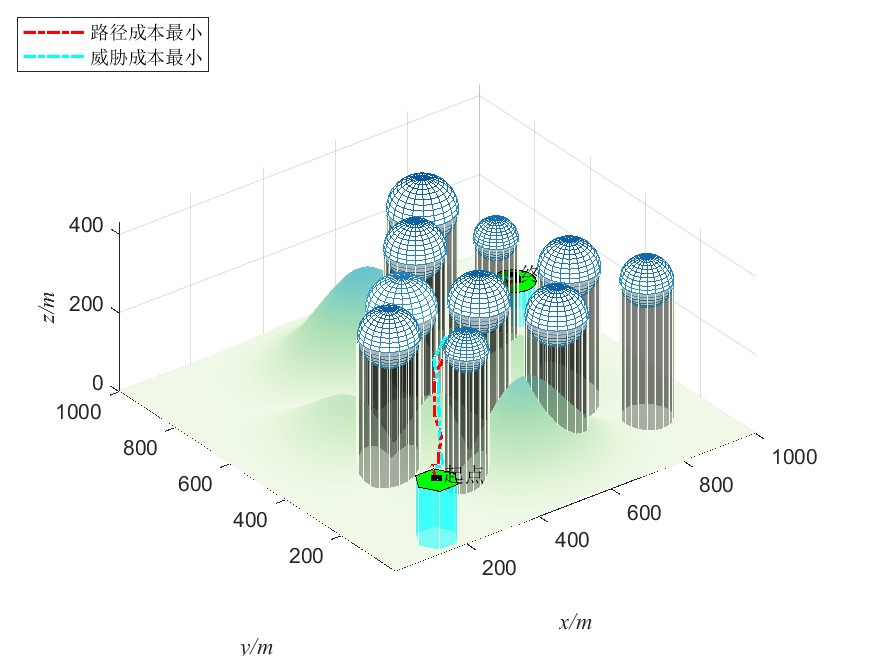
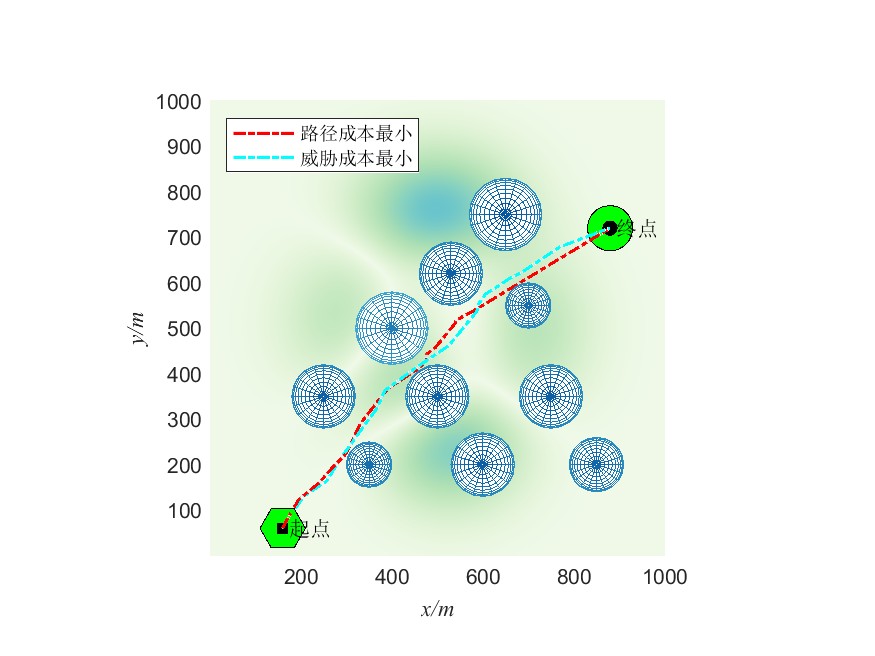
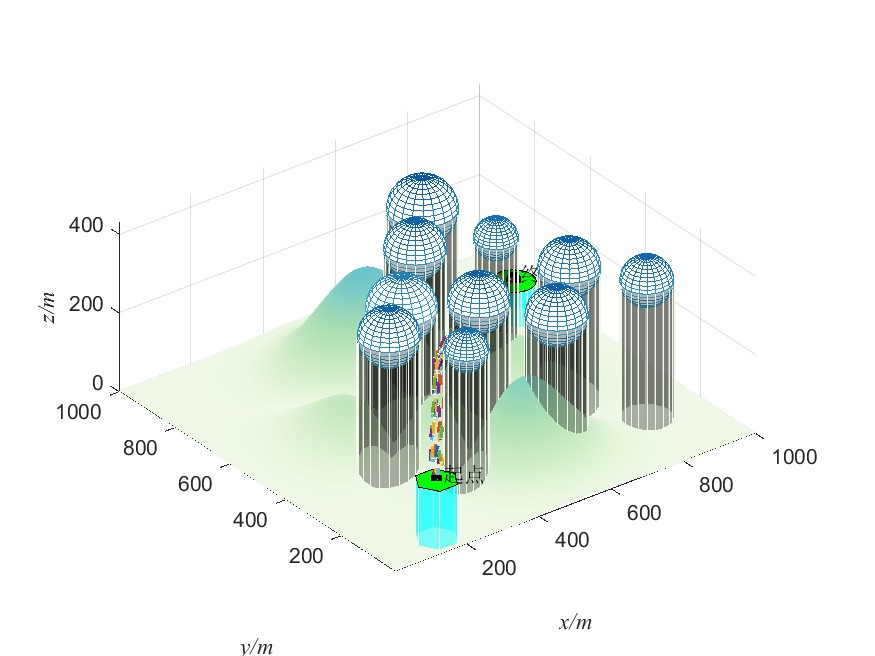
1. **Monitavoitteen optimointistrategia**: UAV-polun suunnittelussa useita tavoitteita on otettava huomioon samanaikaisesti, kuten polun pituus, turvallisuus, lentoaika ja dynaamiset rajoitukset. Näiden tavoitteiden optimointi voi auttaa droneja löytämään optimaaliset polut monimutkaisissa ympäristöissä.
2. **Heuristinen hakualgoritmi**: Perinteisiä heuristisia hakualgoritmeja, kuten A*-algoritmia, on käytetty UAV-polun suunnitteluun. Nämä algoritmit voivat kuitenkin kohdata tehokkuus- ja lähentymisnopeushaasteita monimutkaisissa ympäristöissä.
3. **Metaheuristinen algoritmi**: Reitin optimointiongelman ratkaisemiseksi tutkijat ovat ottaneet käyttöön parannettuja heuristisia algoritmeja, kuten hiukkasparvioptimoinnin (PSO), geneettisen algoritmin (GA) ja harmaan susin optimoijan (GWO). Nämä algoritmit toimivat hyvin monimutkaisten kombinatoristen optimointiongelmien ratkaisemisessa.
4. **Koneoppimiseen perustuvat menetelmät**: Syväoppimis- ja vahvistusoppimismenetelmiä sovelletaan myös droonireitin suunnitteluun, jolloin droonit voivat oppia anturitiedoista ja mukautua monimutkaisiin ympäristöihin.
5. **Moniagenttiyhteistyösuunnittelu**: Usean UAV-järjestelmissä yhteistyösuunnittelu on erityisen tärkeää. Tämä sisältää tehtävien jakamisen, polun suunnittelun ja yhteisen päätöksenteon, jolla varmistetaan yhteistyö ja resurssien jakaminen droonien välillä.
6. **Erittäin tarkka kartta- ja anturifuusio**: Yhdistämällä korkean tarkkuuden karttatietoja ja anturidataa, kuten GPS:ää, lidaria ja kameroita, voidaan parantaa drone-navigoinnin tarkkuutta ja mukautua dynaamisiin ympäristöihin.
7. **Dynaamisen ympäristön mukautumiskyky**: UAV-polun suunnittelualgoritmeilla on oltava kyky havaita ympäristön muutokset ja mukautua niihin reaaliajassa selviytyäkseen dynaamisten esteiden ja sääolosuhteiden muutoksista.
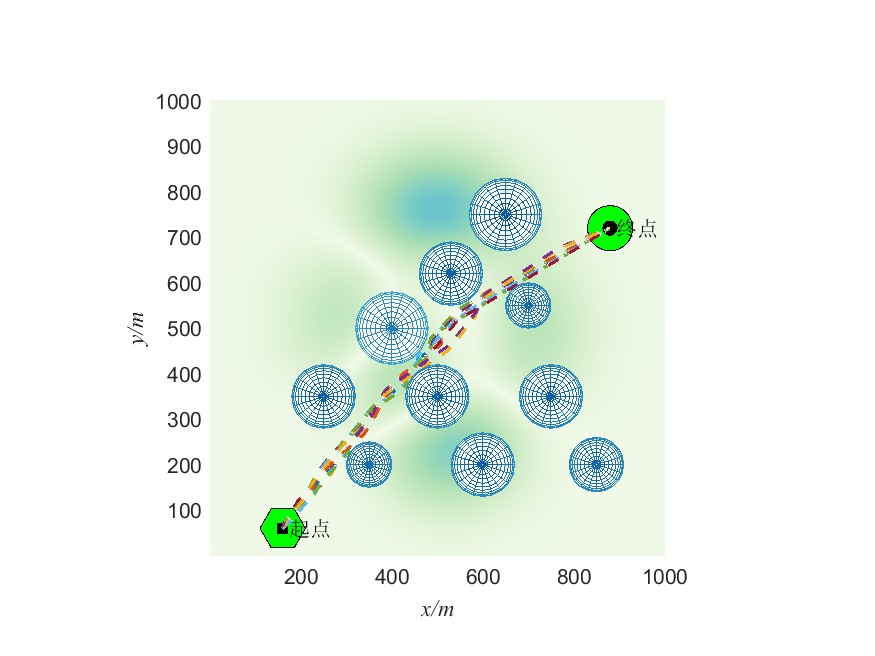
8. **Multi-objektiivinen hiukkasparven optimointialgoritmi, joka perustuu navigointimuuttujiin (NMOPSO)**: Tämä on algoritmi UAV-esteen välttämispolun suunnitteluun monimutkaisissa vuoristoympäristöissä. Se käyttää navigointimuuttujia UAV:n lentoasenteen kuvaamiseen. ja löytää turvallisia ja tehokkaita polkuja usean tavoitteen optimointitekniikan avulla.
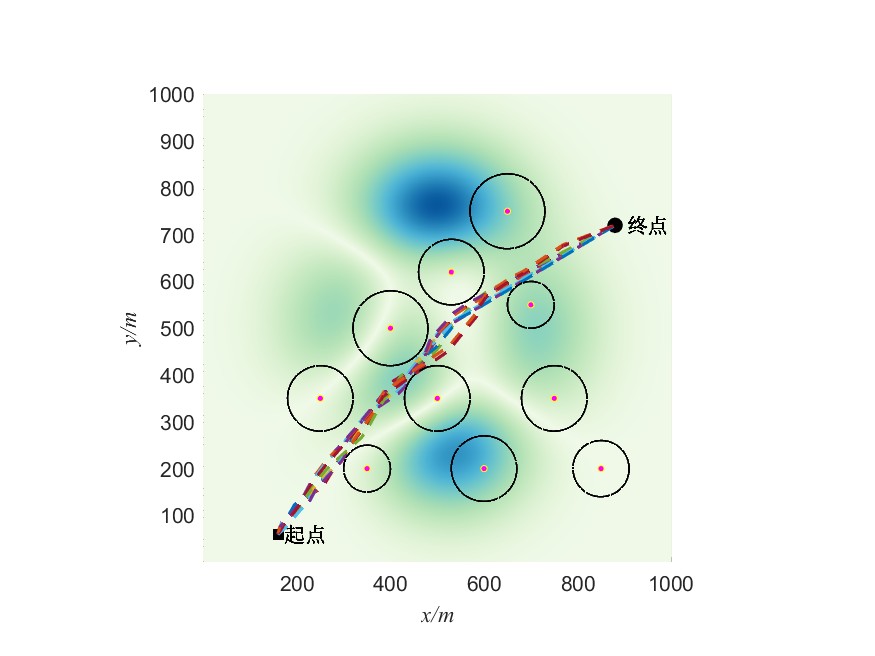
9. **Monitavoitteen optimointistrategia, jossa otetaan huomioon turvallisten lentokanavien rajoitteet**: Monimutkaisissa ympäristöissä, kuten maanalaisissa hiilikaivoksissa, turvallisten lentokanavien ja lentoratojen optimointi on ratkaisevan tärkeää UAV-koneiden lentoturvallisuuden varmistamiseksi. Ehdotettu algoritmi generoi lentoradan, jolla on parempi kokonaisvaltainen suorituskyky, säätämällä puolitason normaalivektoria turvallisen lentokanavan luomisen prosessissa ja käyttämällä usean tavoitteen funktioita UAV-radan suoritusindikaattoreiden mallintamiseen ja optimointiin.
Näiden menetelmien ja algoritmien kokonaisvaltaisella soveltamisella UAV-polun suunnittelun usean tavoitteen optimointiratkaisut voivat parantaa polun suunnittelun tehokkuutta ja vaikuttavuutta turvallisuuden varmistamisessa. Tuleva tutkimus ohjaa jatkossakin algoritmien kehitystä sopeutumaan monimutkaisempiin ja dynaamisempiin ympäristöihin.


Hän on omistautunut teknologian tutkimukselle yli 30 vuoden ajan ja hallitsee useita kieliä, kuten java, linux, javascript, php, css jne. Hän on tehnyt paljon työtä avoimen lähdekoodin alalla Kehittäjän dokumentaatioasema jakaaksesi joitain teknologian kehityksen ongelmia tulevaa käyttöä varten
