моя контактная информация
Почтамезофия@protonmail.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Решение многокритериальной оптимизации для планирования траектории БПЛА представляет собой сложный процесс, включающий рассмотрение множества целей и применение алгоритмов оптимизации. Вот обзор некоторых ключевых моментов и связанных с ними алгоритмов:
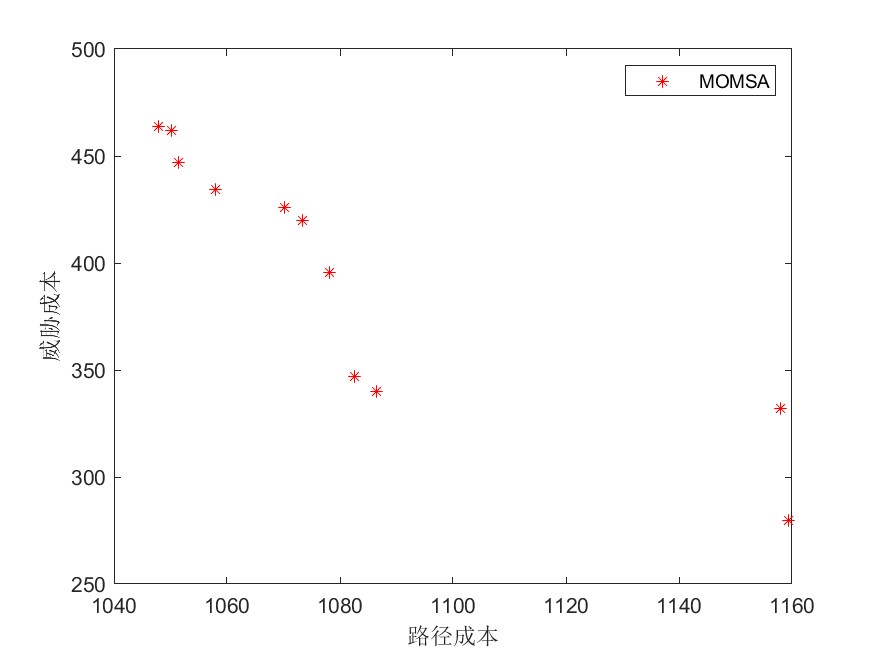
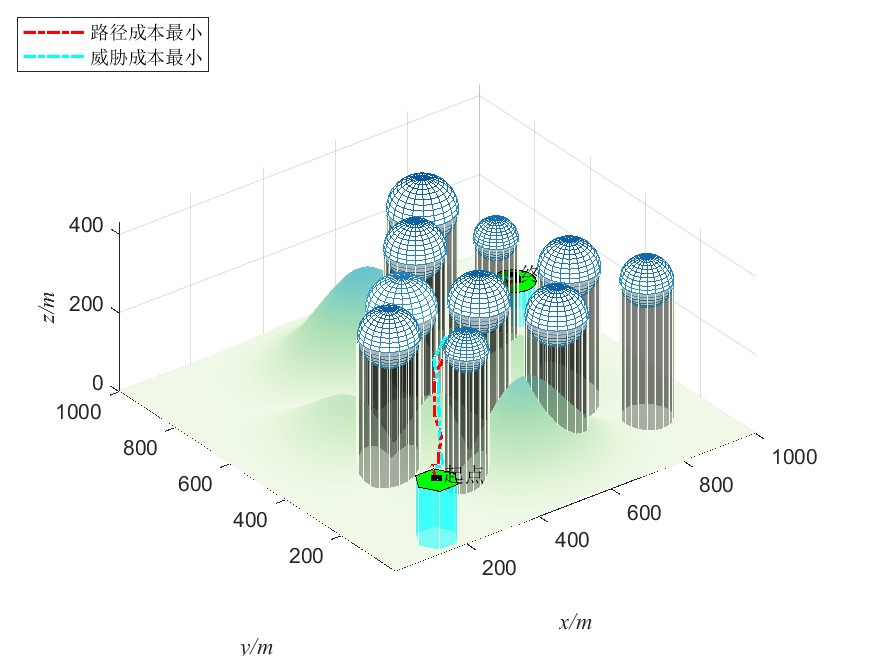
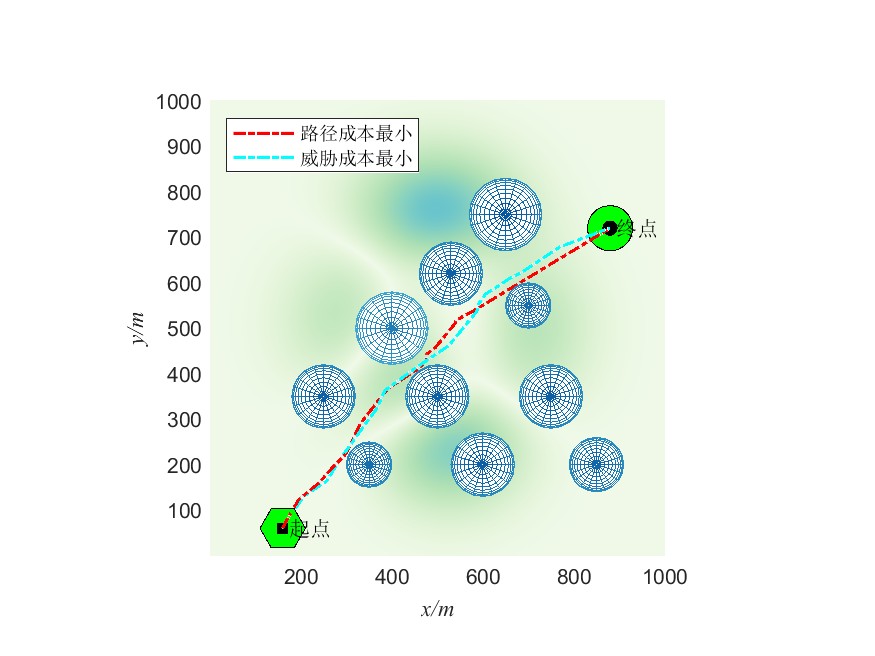
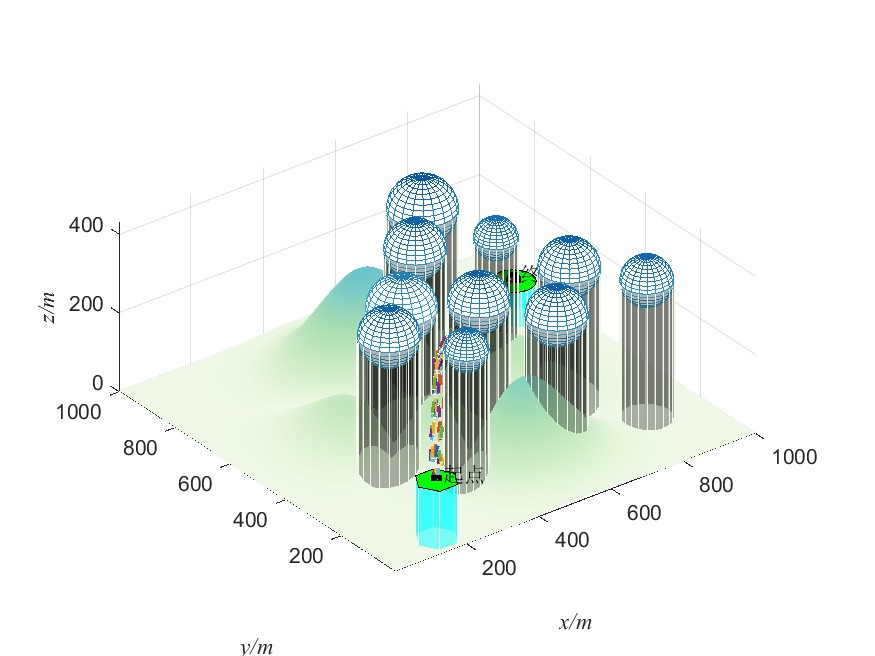
1. **Стратегия многоцелевой оптимизации**: при планировании траектории БПЛА необходимо одновременно учитывать несколько целей, таких как длина траектории, безопасность, время полета и динамические ограничения. Оптимизация этих целей может помочь дронам находить оптимальные пути в сложных условиях.
2. **Алгоритм эвристического поиска**: Традиционные алгоритмы эвристического поиска, такие как алгоритм A*, использовались для планирования траектории БПЛА. Однако эти алгоритмы могут столкнуться с проблемами эффективности и скорости сходимости в сложных средах.
3. **Метаэвристический алгоритм**. Для решения проблемы оптимизации пути исследователи использовали улучшенные эвристические алгоритмы, такие как оптимизация роя частиц (PSO), генетический алгоритм (GA) и оптимизатор серого волка (GWO). Эти алгоритмы выполняют хорошо справляется с решением сложных задач комбинаторной оптимизации.
4. **Методы на основе машинного обучения**. Для планирования траектории движения дронов также применяются методы глубокого обучения и обучения с подкреплением, что позволяет дронам учиться на данных датчиков и адаптироваться к сложным условиям.
5. **Совместное планирование нескольких агентов**. В системах с несколькими БПЛА совместное планирование особенно важно. Это включает в себя распределение задач, планирование пути и совместное принятие решений для обеспечения сотрудничества и совместного использования ресурсов между дронами.
6. **Высокоточная карта и сочетание датчиков**. Сочетание высокоточных картографических данных и данных датчиков, таких как GPS, лидар и камеры, может повысить точность навигации дронов и адаптироваться к динамическим условиям.
7. **Адаптируемость к динамической среде**. Алгоритмы планирования траектории БПЛА должны иметь возможность воспринимать и адаптироваться к изменениям окружающей среды в режиме реального времени, чтобы справляться с изменениями в динамических препятствиях и метеорологических условиях.
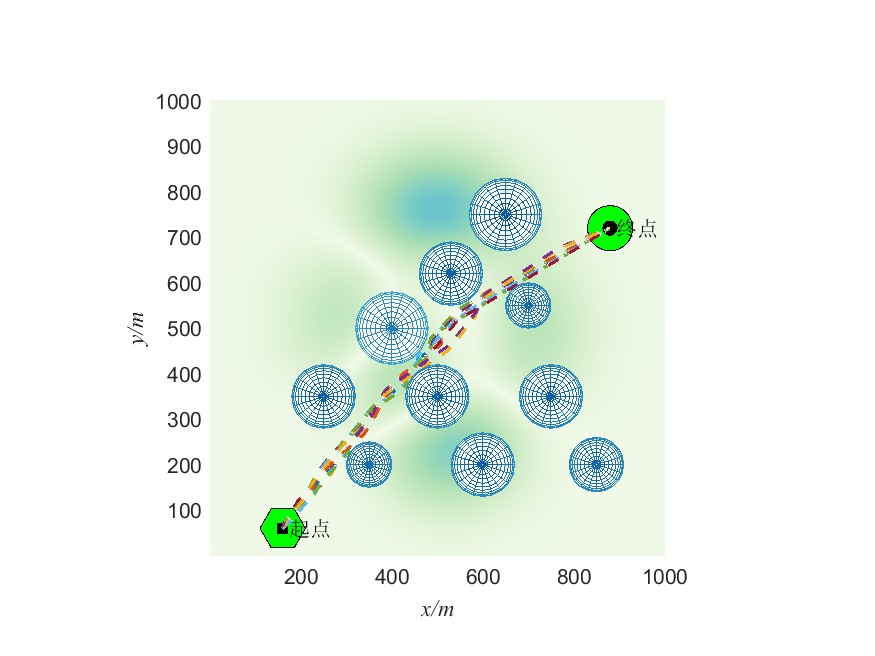
8. **Многоцелевой алгоритм оптимизации роя частиц на основе навигационных переменных (NMOPSO)**: это алгоритм планирования траектории обхода препятствий БПЛА в сложных горных условиях. Он использует навигационные переменные для описания положения БПЛА в полете. и найти безопасные и эффективные пути с помощью технологии многоцелевой оптимизации.
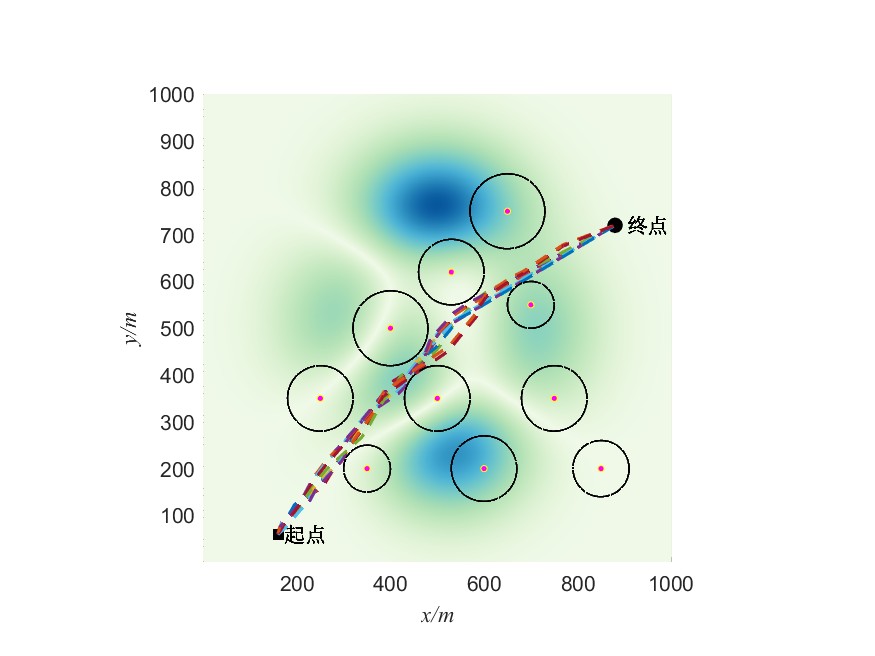
9. **Многоцелевая стратегия оптимизации с учетом ограничений безопасных каналов полета**. В сложных условиях, таких как подземные угольные шахты, оптимизация безопасных каналов полета и траекторий полета имеет решающее значение для обеспечения безопасности полета БПЛА. Предложенный алгоритм формирует траекторию полета с лучшими комплексными характеристиками за счет корректировки вектора нормали полуплоскости в процессе формирования безопасного канала полета и использования многоцелевых функций для моделирования и оптимизации показателей эффективности траектории БПЛА.
Благодаря комплексному применению этих методов и алгоритмов многокритериальные решения по оптимизации планирования траектории БПЛА могут повысить эффективность и результативность планирования траектории, обеспечивая при этом безопасность. Будущие исследования будут продолжать стимулировать разработку алгоритмов для адаптации к более сложным и динамичным средам.


Он посвятил себя исследованию технологий более 30 лет и владеет различными языками, такими как Java, Linux, Javascript, php, css и т. д. Он внес большой вклад в область открытого исходного кода. Станция документации для разработчиков, где можно поделиться некоторыми проблемами в разработке технологий для дальнейшего использования. Все ознакомьтесь.

Почтамезофия@protonmail.com