2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
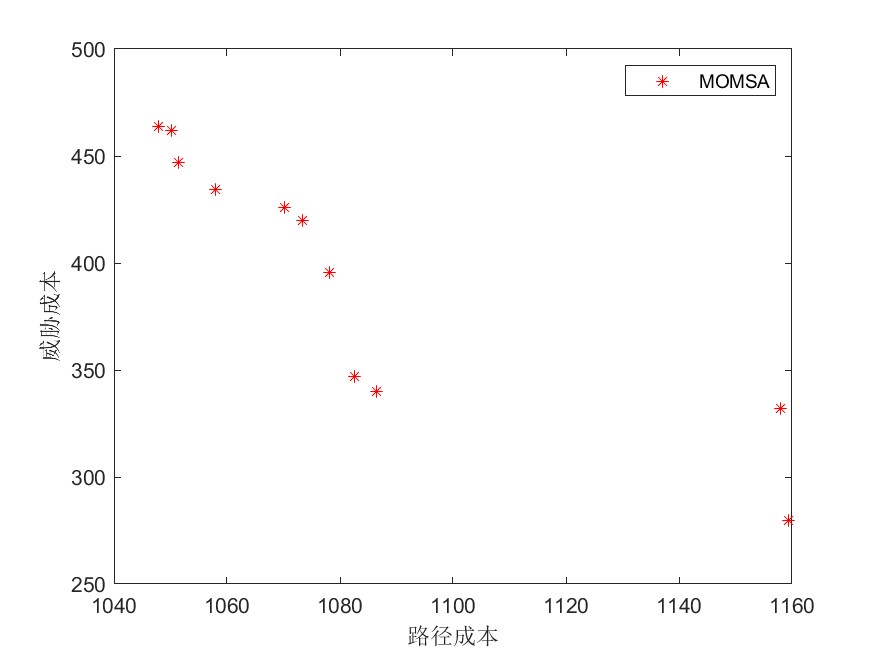
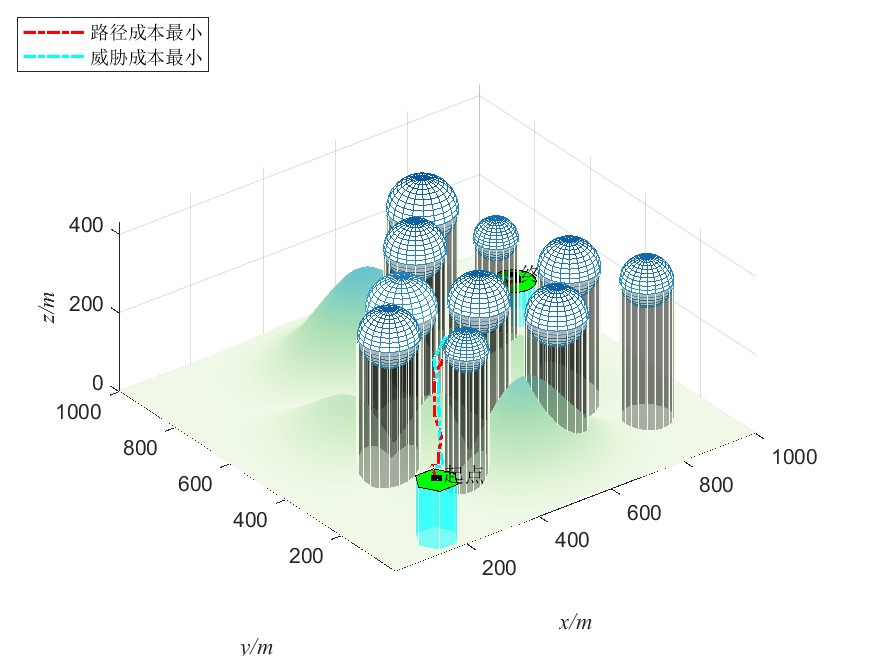
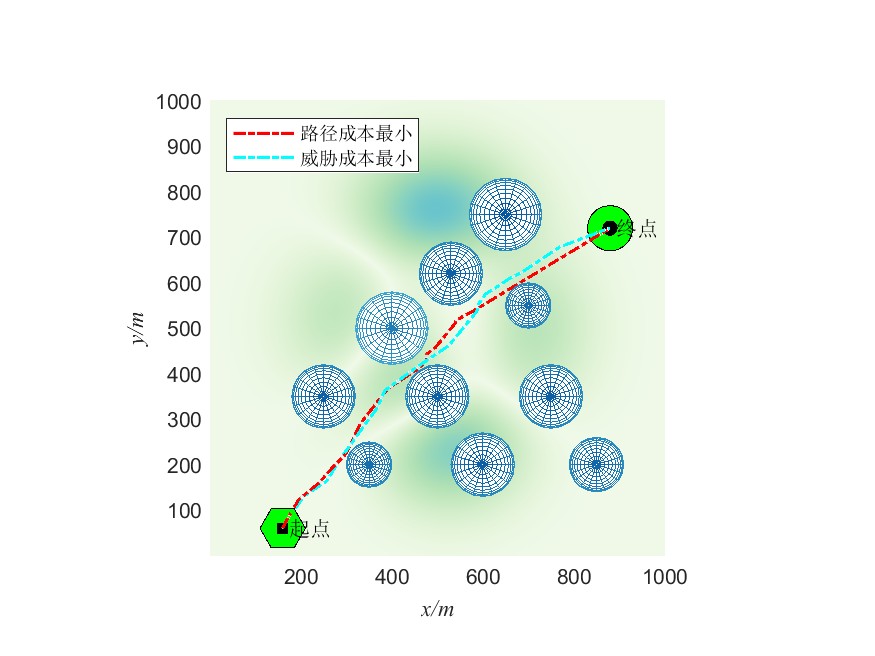
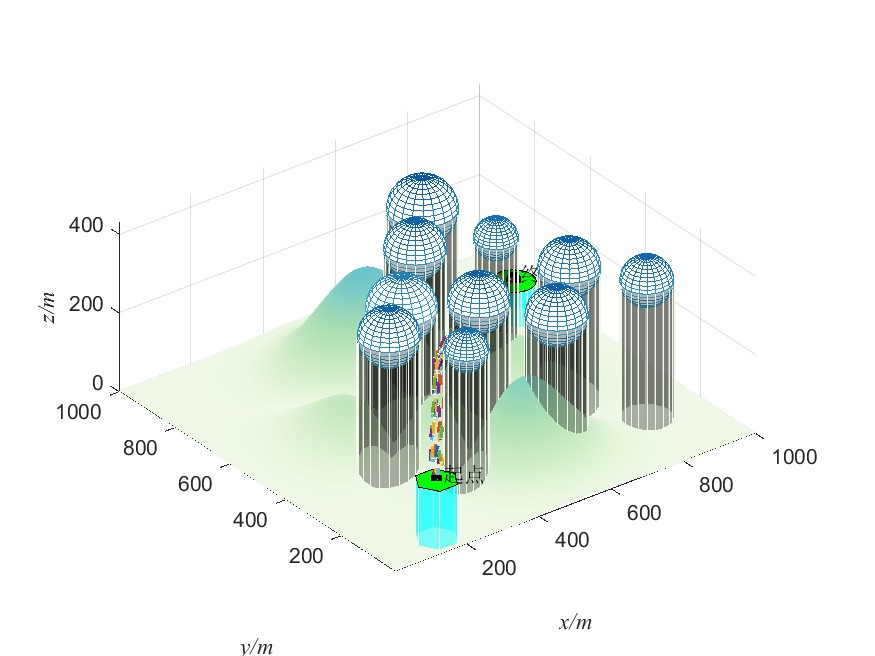
The multi-objective optimization solution for UAV path planning is a complex process involving the consideration of multiple objectives and the application of optimization algorithms. The following is an overview of some key points and related algorithms:
1. **Multi-objective optimization strategy**: In drone path planning, multiple objectives need to be considered simultaneously, such as path length, safety, flight time, and dynamic constraints. Optimizing these objectives can help drones find the optimal path in complex environments.
2. **Heuristic search algorithm**: Traditional heuristic search algorithms, such as the A* algorithm, have been used for UAV path planning. However, these algorithms may face challenges in efficiency and convergence speed in complex environments.
3. Meta-heuristic algorithms: To solve the path optimization problem, researchers have used improved heuristic algorithms such as particle swarm optimization (PSO), genetic algorithm (GA) and grey wolf optimizer (GWO), which perform well in solving complex combinatorial optimization problems.
4. Machine learning-based methods: Deep learning and reinforcement learning methods are also applied to UAV path planning, enabling UAVs to learn from sensor data and adapt to complex environments.
5. **Multi-agent collaborative planning**: In a multi-UAV system, collaborative planning is particularly important. This involves task allocation, path planning, and collaborative decision-making to ensure cooperation and resource sharing among UAVs.
6. **High-precision maps and sensor fusion**: Combining high-precision map data with sensor data, such as GPS, lidar, and cameras, can improve the accuracy of drone navigation and adapt to dynamic environments.
7. **Dynamic environment adaptability**: The drone path planning algorithm needs to have the ability to perceive and adapt to environmental changes in real time to cope with changes in dynamic obstacles and weather conditions.
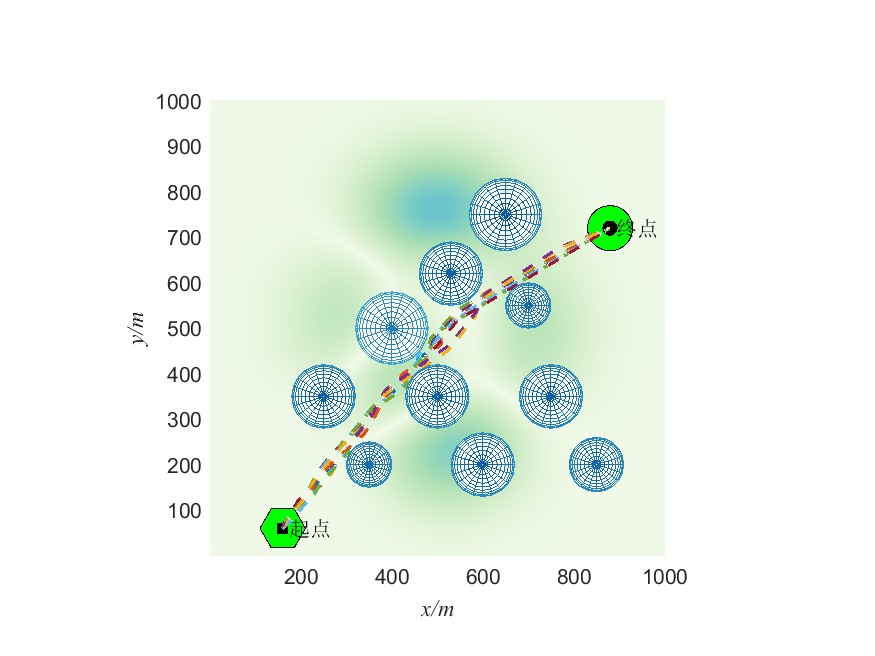
8. **Multi-objective Particle Swarm Optimization Algorithm based on Navigation Variables (NMOPSO)**: This is an algorithm for obstacle avoidance path planning for UAVs in complex mountainous environments. It uses navigation variables to describe the flight attitude of the UAV and uses multi-objective optimization technology to find a safe and efficient path.
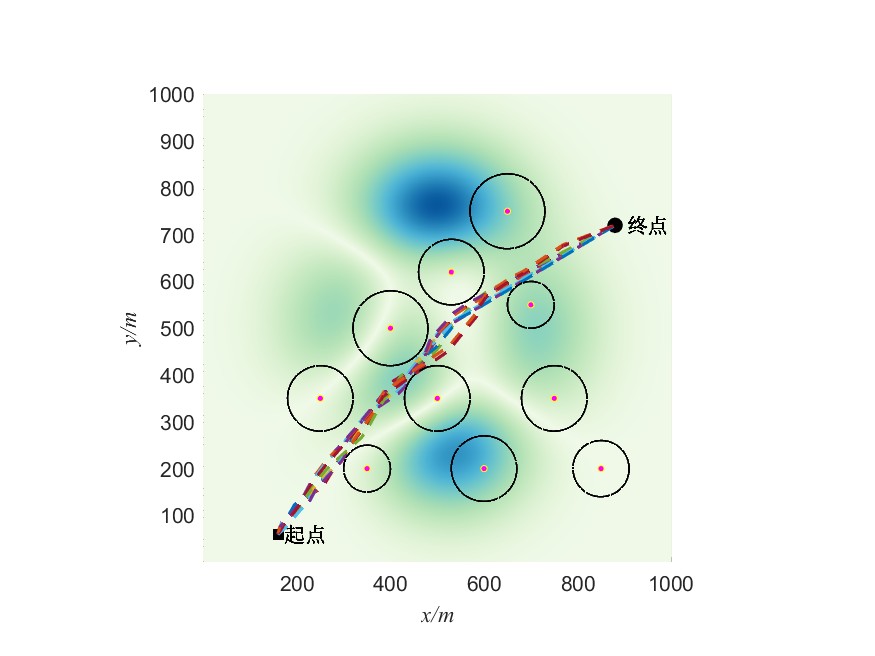
9. **Multi-objective optimization strategy considering safe flight channel constraints**: In complex environments, such as underground coal mines, optimizing safe flight channels and flight trajectories is crucial to ensure the flight safety of UAVs. The proposed algorithm adjusts the normal vector of the half-plane in the process of generating safe flight channels and uses multi-objective functions to model and optimize the performance indicators of UAV trajectories to generate flight trajectories with better comprehensive performance.
Through the comprehensive application of these methods and algorithms, the multi-objective optimization solution of UAV path planning can improve the efficiency and effectiveness of path planning while ensuring safety. Future research will continue to promote the development of algorithms to adapt to more complex and dynamic environments.


I have devoted myself to the research of technology for more than 30 years. I am proficient in various languages such as Java, Linux, JavaScript, PHP, CSS, etc. I have made many contributions in the field of open source. I have established a developer documentation site to share some problems in technology development for everyone to read.
