내 연락처 정보
우편메소피아@프로톤메일.com
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
UAV 경로 계획을 위한 다중 목표 최적화 솔루션은 여러 목표를 고려하고 최적화 알고리즘을 적용하는 복잡한 프로세스입니다. 다음은 몇 가지 핵심 사항과 관련 알고리즘에 대한 개요입니다.
1. **다목적 최적화 전략**: UAV 경로 계획에서는 경로 길이, 안전, 비행 시간 및 동적 제약 조건과 같은 여러 목표를 동시에 고려해야 합니다. 이러한 목표를 최적화하면 드론이 복잡한 환경에서 최적의 경로를 찾는 데 도움이 될 수 있습니다.
2. **휴리스틱 검색 알고리즘**: A* 알고리즘과 같은 기존의 휴리스틱 검색 알고리즘이 UAV 경로 계획에 사용되었습니다. 그러나 이러한 알고리즘은 복잡한 환경에서 효율성과 수렴 속도 문제에 직면할 수 있습니다.
3. **메타휴리스틱 알고리즘**: 경로 최적화 문제를 해결하기 위해 연구자들은 입자군집최적화(PSO), 유전자 알고리즘(GA), 회색늑대 최적화기(GWO) 등 개선된 휴리스틱 알고리즘을 채택했습니다. 복잡한 조합 최적화 문제를 해결하는 데 효과적입니다.
4. **머신러닝 기반 방법**: 드론 경로 계획에도 딥 러닝 및 강화 학습 방법이 적용되어 드론이 센서 데이터를 학습하고 복잡한 환경에 적응할 수 있습니다.
5. **다중 에이전트 공동 계획**: 다중 UAV 시스템에서는 공동 계획이 특히 중요합니다. 여기에는 드론 간의 협력과 리소스 공유를 보장하기 위한 작업 할당, 경로 계획 및 공동 의사 결정이 포함됩니다.
6. **고정밀 지도 및 센서 융합**: 고정밀 지도 데이터와 GPS, LiDAR, 카메라 등의 센서 데이터를 결합하면 드론 내비게이션의 정확성을 높이고 동적 환경에 적응할 수 있습니다.
7. **동적 환경 적응성**: UAV 경로 계획 알고리즘은 동적 장애물 및 기상 조건의 변화에 대처하기 위해 환경 변화를 실시간으로 인식하고 적응할 수 있는 능력을 갖추어야 합니다.
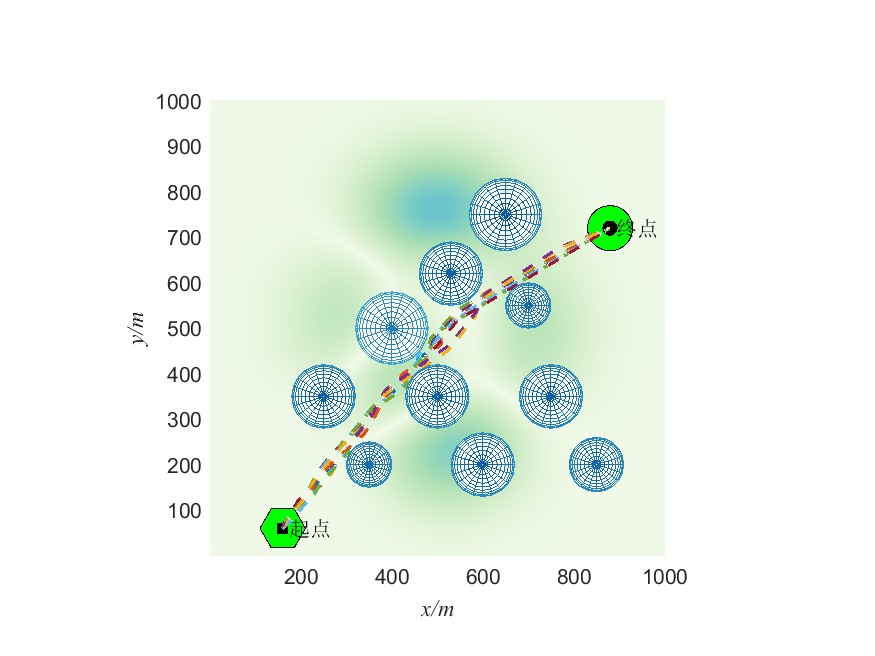
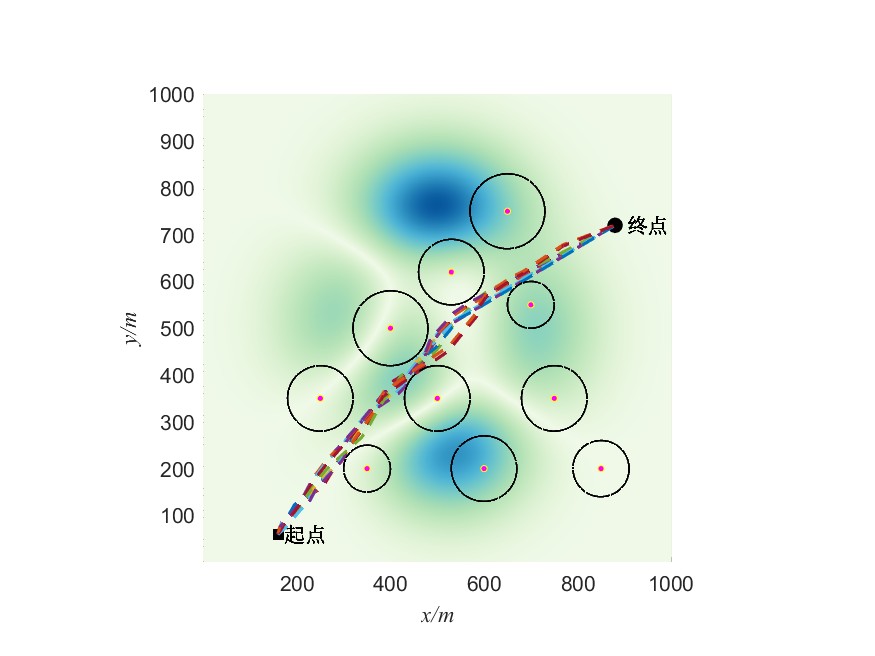
8. **항법 변수 기반 다중 목표 입자 떼 최적화 알고리즘(NMOPSO)**: 복잡한 산악 환경에서 UAV 장애물 회피 경로 계획을 위한 알고리즘으로 UAV의 비행 자세를 설명합니다. 다중 목표 최적화 기술을 통해 안전하고 효율적인 경로를 찾습니다.
9. **안전 비행 채널 제약을 고려한 다목적 최적화 전략**: 지하 탄광과 같은 복잡한 환경에서 안전한 비행 채널과 비행 궤적을 최적화하는 것은 UAV의 비행 안전을 보장하는 데 중요합니다. 제안된 알고리즘은 안전한 비행 채널을 생성하는 과정에서 반평면 법선 벡터를 조정하고 다목적 기능을 사용하여 UAV 궤적의 성능 지표를 모델링하고 최적화함으로써 보다 포괄적인 성능을 갖춘 비행 궤적을 생성합니다.
이러한 방법과 알고리즘의 포괄적인 적용을 통해 UAV 경로 계획을 위한 다목적 최적화 솔루션은 경로 계획의 효율성과 효과를 향상시키는 동시에 안전을 보장할 수 있습니다. 향후 연구에서는 더욱 복잡하고 역동적인 환경에 적응할 수 있는 알고리즘 개발을 계속해서 추진할 것입니다.
(1) UAV 3차원 경로 계획(MATLAB 코드)을 해결하기 위한 다목적 Mantis 검색 알고리즘(MOMSA) - CSDN 블로그
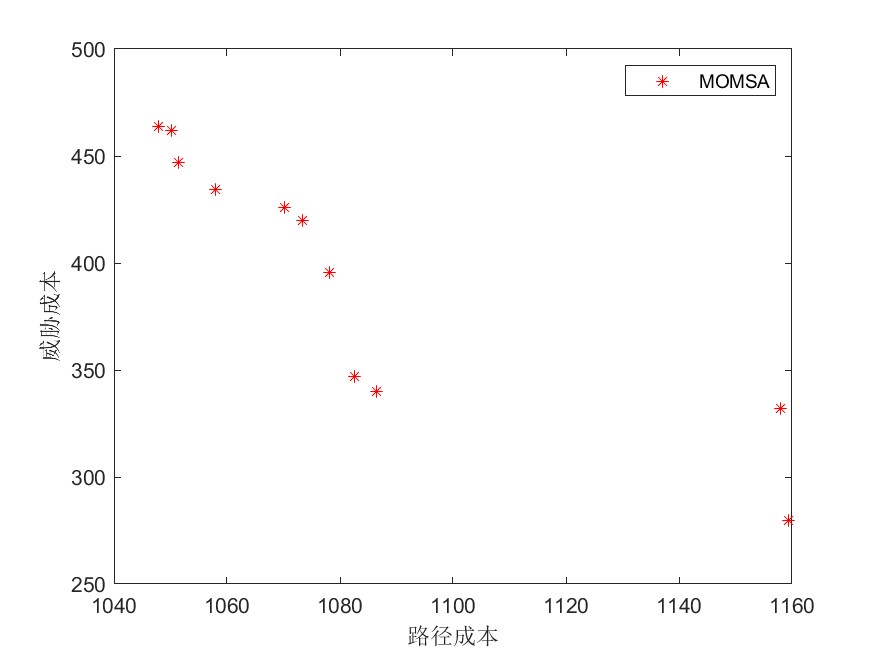
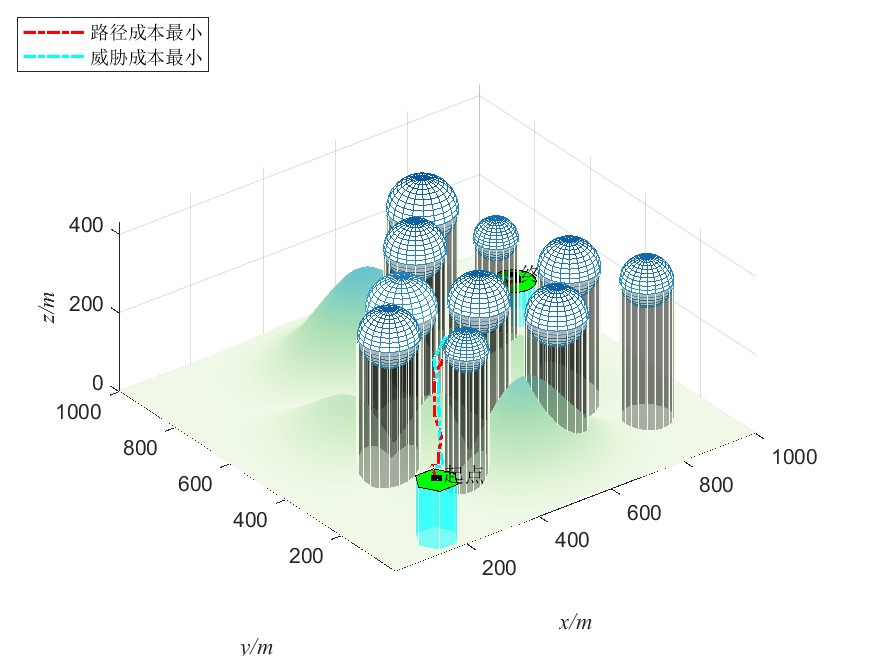
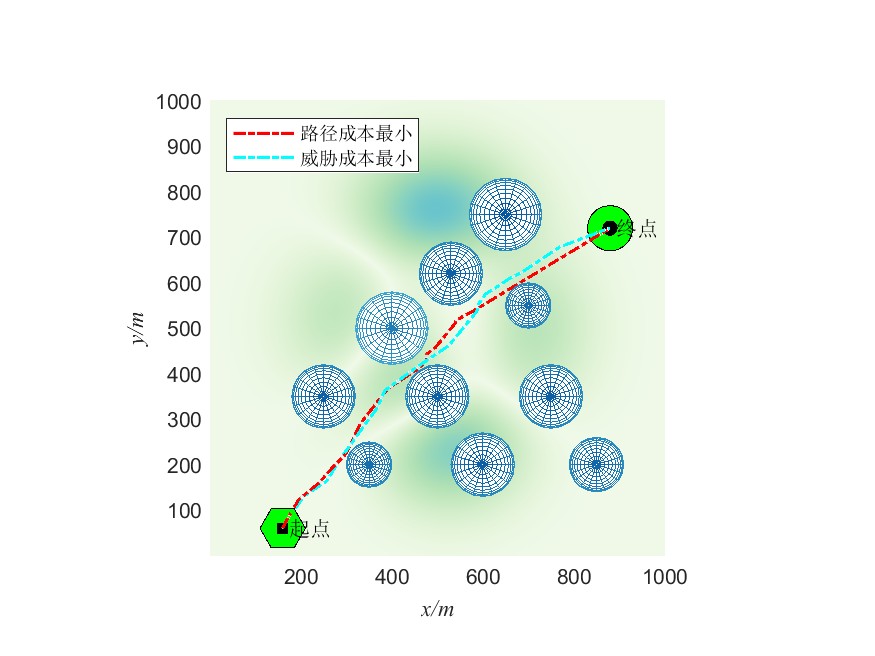

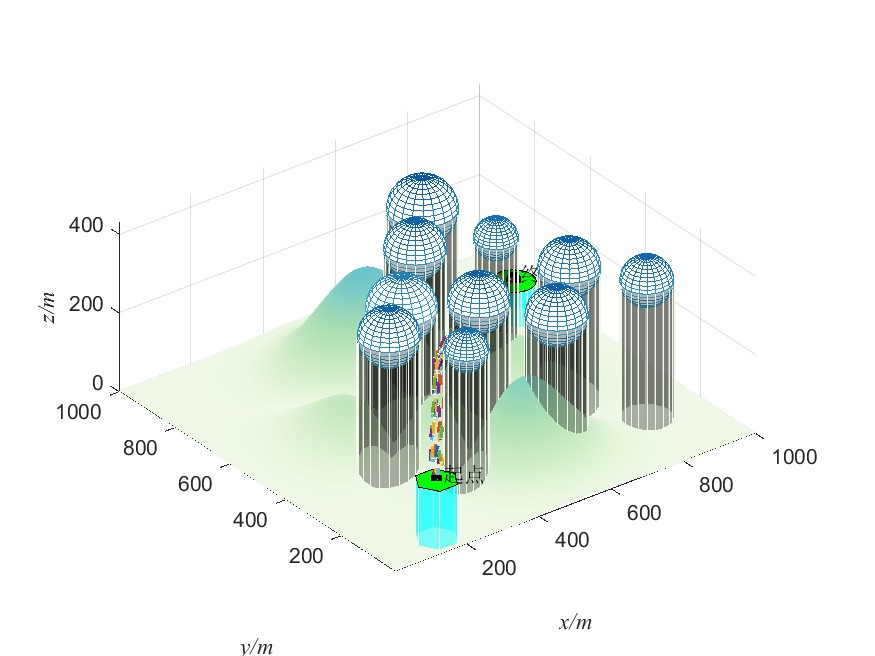
(2) 다목적 사마귀 탐색 알고리즘 MOMSA는 드론의 3차원 경로 계획을 해결하고 스스로 장애물의 위치를 수정할 수 있습니다(MATLAB 코드).
(1) 다목적 사마귀 탐색 알고리즘 MOMSA는 드론의 3차원 경로 계획을 해결하고 스스로 장애물의 위치를 수정할 수 있습니다(MATLAB 코드).
다목적 응용: 다목적 사마귀 검색 알고리즘 MOMSA는 UAV의 3차원 경로 계획을 해결하고 스스로 장애물 위치를 수정할 수 있습니다(MATLAB 코드).

그는 30년 이상 기술 연구에 전념해 왔으며, java, linux, javascript, php, css 등 다양한 언어에 능숙하며, 오픈 소스 분야에서 많은 공헌을 했습니다. 나중에 참조할 수 있도록 기술 개발의 일부 문제를 공유하는 개발자 문서 스테이션입니다.

우편메소피아@프로톤메일.com