Mi informacion de contacto
Correo[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
La solución de optimización multiobjetivo para la planificación de rutas de vehículos aéreos no tripulados es un proceso complejo que implica la consideración de múltiples objetivos y la aplicación de algoritmos de optimización. A continuación se ofrece una descripción general de algunos puntos clave y algoritmos relacionados:
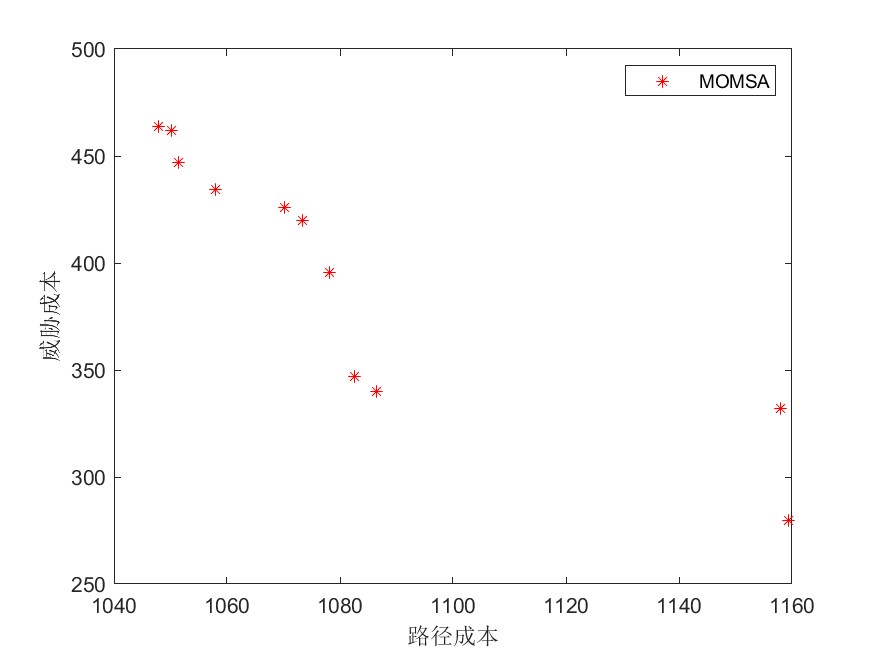
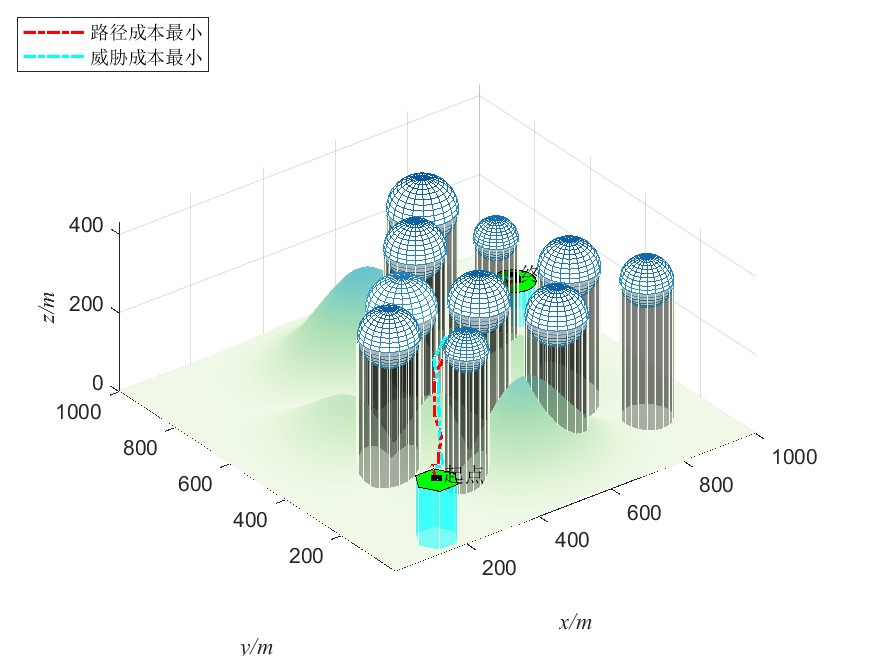
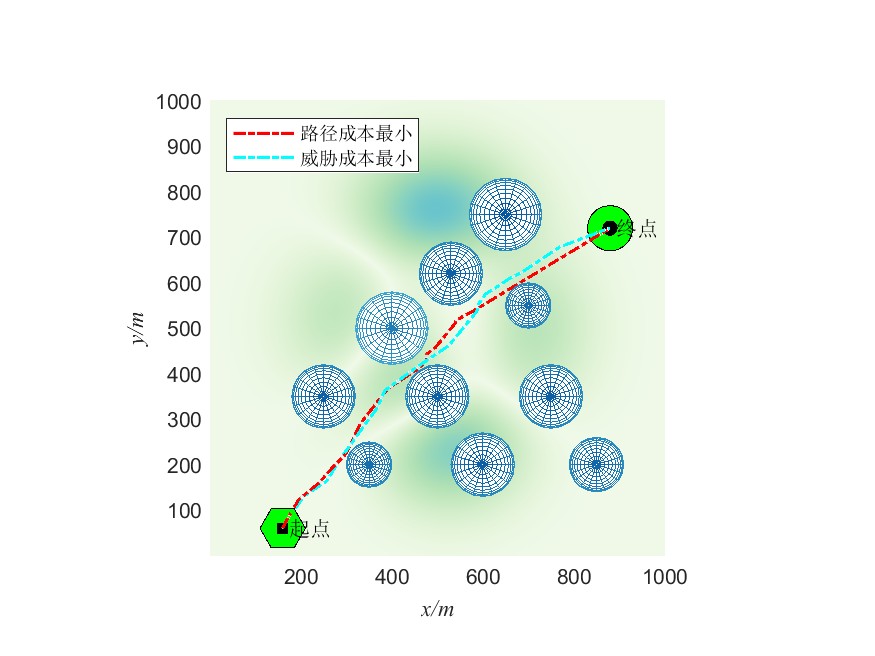
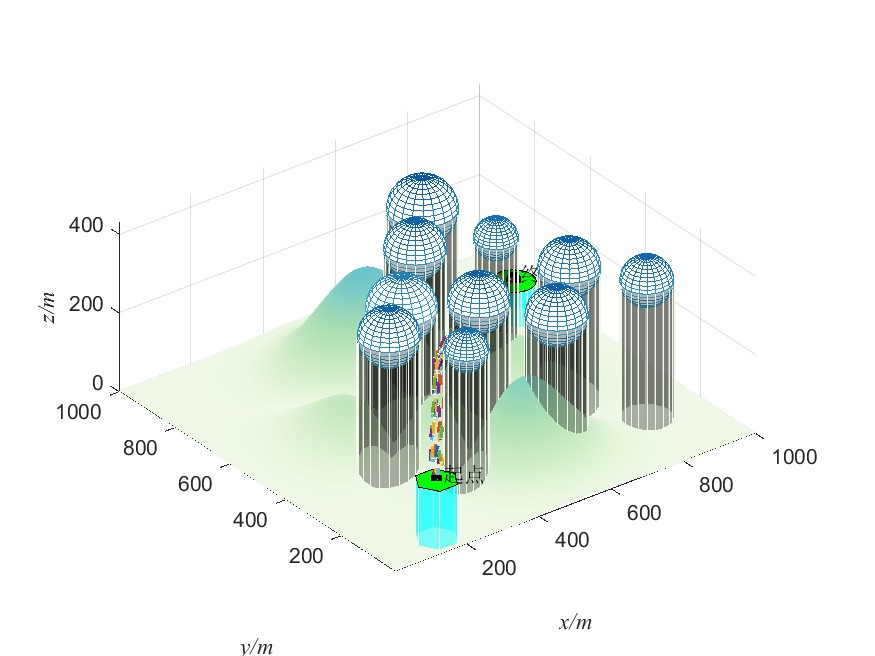
1. **Estrategia de optimización de objetivos múltiples**: en la planificación de rutas de vehículos aéreos no tripulados, se deben considerar múltiples objetivos simultáneamente, como la longitud de la ruta, la seguridad, el tiempo de vuelo y las limitaciones dinámicas. Optimizar estos objetivos puede ayudar a los drones a encontrar rutas óptimas en entornos complejos.
2. **Algoritmo de búsqueda heurística**: Los algoritmos de búsqueda heurística tradicionales, como el algoritmo A*, se han utilizado para la planificación de rutas de vehículos aéreos no tripulados. Sin embargo, estos algoritmos pueden enfrentar desafíos de eficiencia y velocidad de convergencia en entornos complejos.
3. **Algoritmo metaheurístico**: para resolver el problema de optimización de rutas, los investigadores han adoptado algoritmos heurísticos mejorados, como la optimización de enjambre de partículas (PSO), el algoritmo genético (GA) y el optimizador de lobo gris (GWO). bien en la resolución de problemas complejos de optimización combinatoria.
4. **Métodos basados en aprendizaje automático**: los métodos de aprendizaje profundo y de refuerzo también se aplican a la planificación de rutas de drones, lo que permite a los drones aprender de los datos de los sensores y adaptarse a entornos complejos.
5. **Planificación colaborativa de múltiples agentes**: en los sistemas multi-UAV, la planificación colaborativa es particularmente importante. Esto implica asignación de tareas, planificación de rutas y toma de decisiones colaborativa para garantizar la cooperación y el intercambio de recursos entre drones.
6. **Fusión de sensores y mapas de alta precisión**: la combinación de datos de mapas de alta precisión y datos de sensores, como GPS, lidar y cámaras, puede mejorar la precisión de la navegación con drones y adaptarse a entornos dinámicos.
7. **Adaptabilidad del entorno dinámico**: los algoritmos de planificación de trayectorias de los UAV deben tener la capacidad de percibir y adaptarse a los cambios ambientales en tiempo real para hacer frente a los cambios en los obstáculos dinámicos y las condiciones meteorológicas.
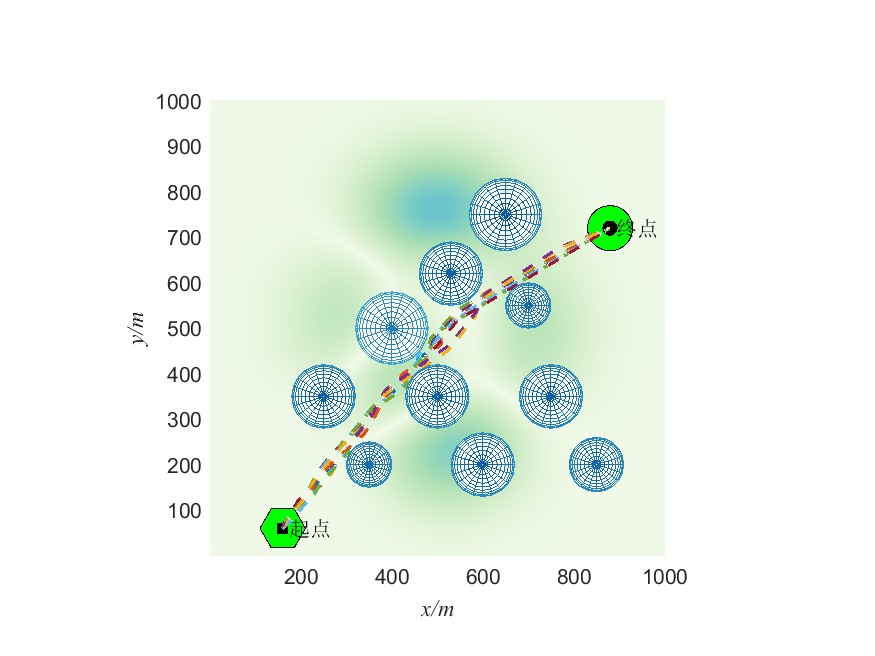
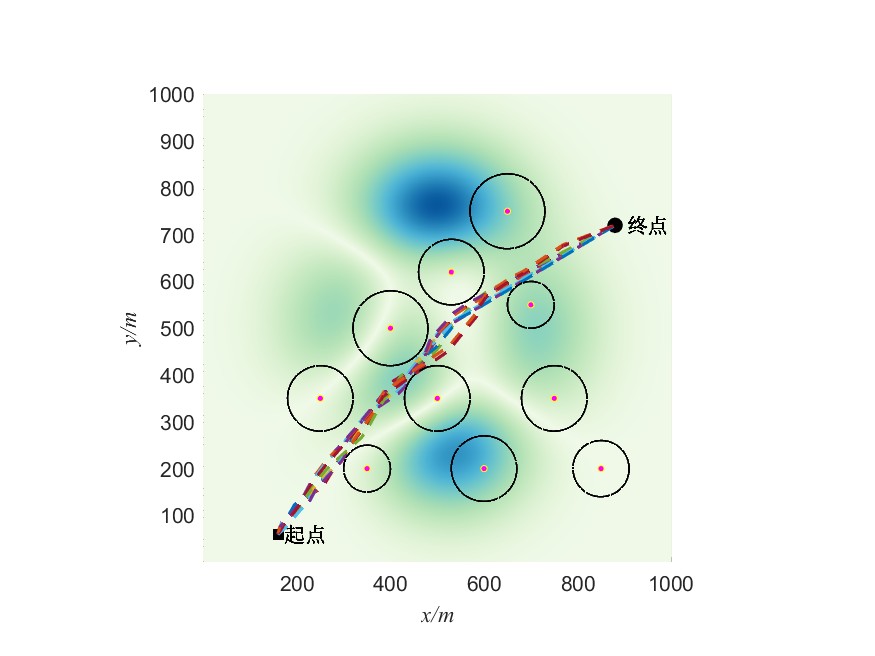
8. ** Algoritmo de optimización de enjambre de partículas multiobjetivo basado en variables de navegación (NMOPSO) **: este es un algoritmo para la planificación de rutas para evitar obstáculos de UAV en entornos montañosos complejos. Utiliza variables de navegación para describir la actitud de vuelo del UAV. y encontrar caminos seguros y eficientes a través de tecnología de optimización multiobjetivo.
9. **Estrategia de optimización multiobjetivo que considera las limitaciones de los canales de vuelo seguros**: en entornos complejos, como las minas de carbón subterráneas, optimizar los canales de vuelo seguros y las trayectorias de vuelo es crucial para garantizar la seguridad de los vuelos de los UAV. El algoritmo propuesto genera una trayectoria de vuelo con mejor rendimiento integral ajustando el vector normal de semiplano en el proceso de generar un canal de vuelo seguro y utilizando funciones multiobjetivo para modelar y optimizar los indicadores de rendimiento de la trayectoria del UAV.
Mediante la aplicación integral de estos métodos y algoritmos, las soluciones de optimización multiobjetivo para la planificación de rutas de vehículos aéreos no tripulados pueden mejorar la eficiencia y eficacia de la planificación de rutas al tiempo que garantizan la seguridad. Las investigaciones futuras seguirán impulsando el desarrollo de algoritmos para adaptarse a entornos más complejos y dinámicos.


Se ha dedicado a la investigación de tecnología durante más de 30 años y domina varios lenguajes como java, linux, javascript, php, css, etc. Ha realizado muchas contribuciones en el campo del código abierto. Estación de documentación para desarrolladores para compartir algunos problemas en el desarrollo de tecnología para referencia futura.

Correo[email protected]