informasi kontak saya
Surat[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
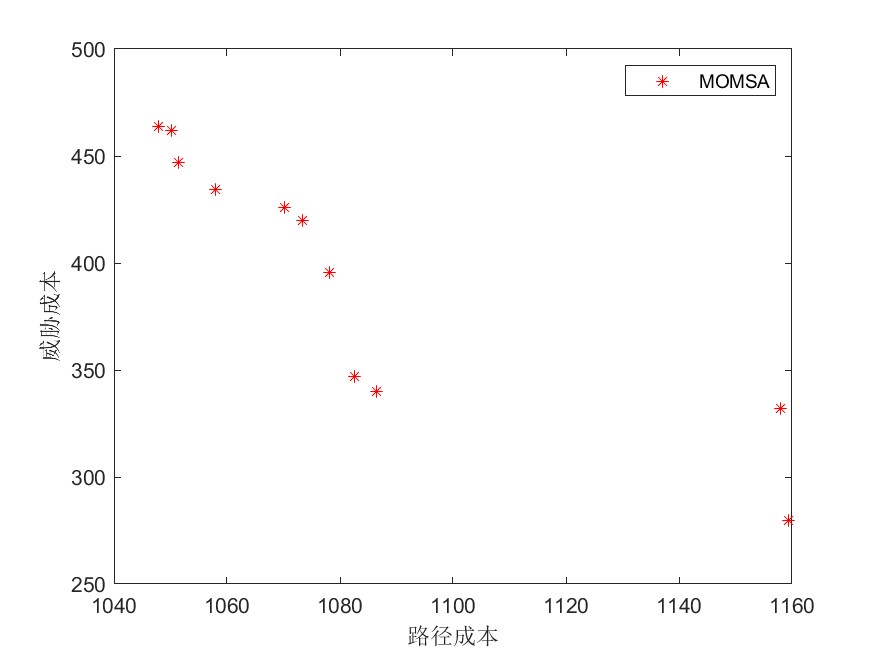
Solusi optimasi multi-tujuan untuk perencanaan jalur UAV adalah proses yang kompleks, yang melibatkan pertimbangan berbagai tujuan dan penerapan algoritma optimasi. Berikut ini ikhtisar beberapa poin penting dan algoritme terkait:
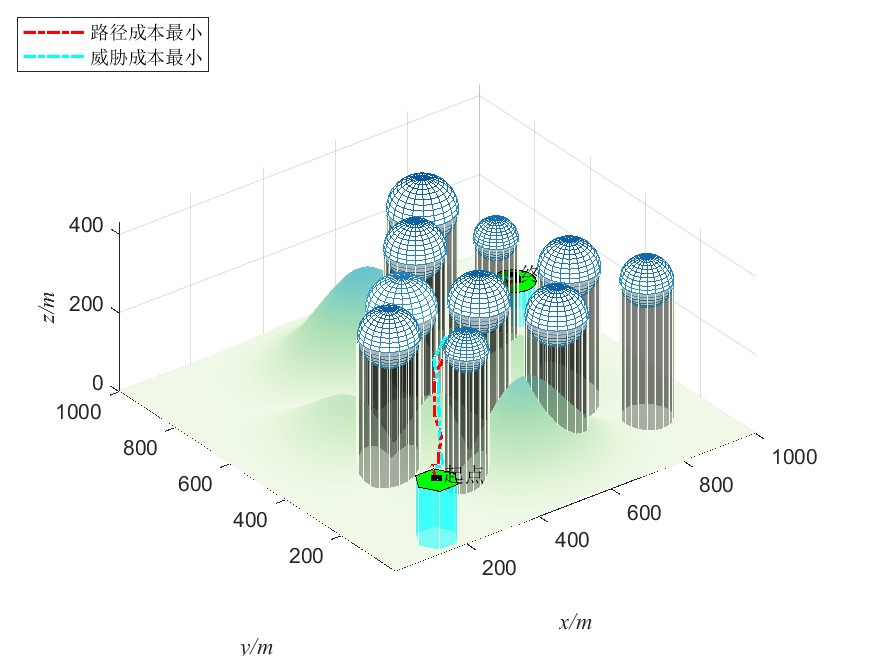
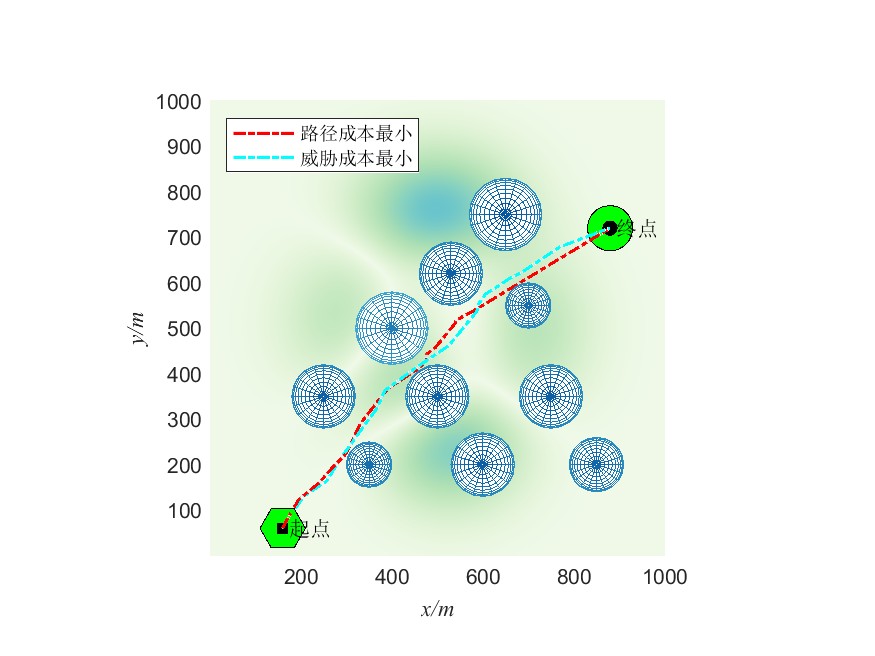
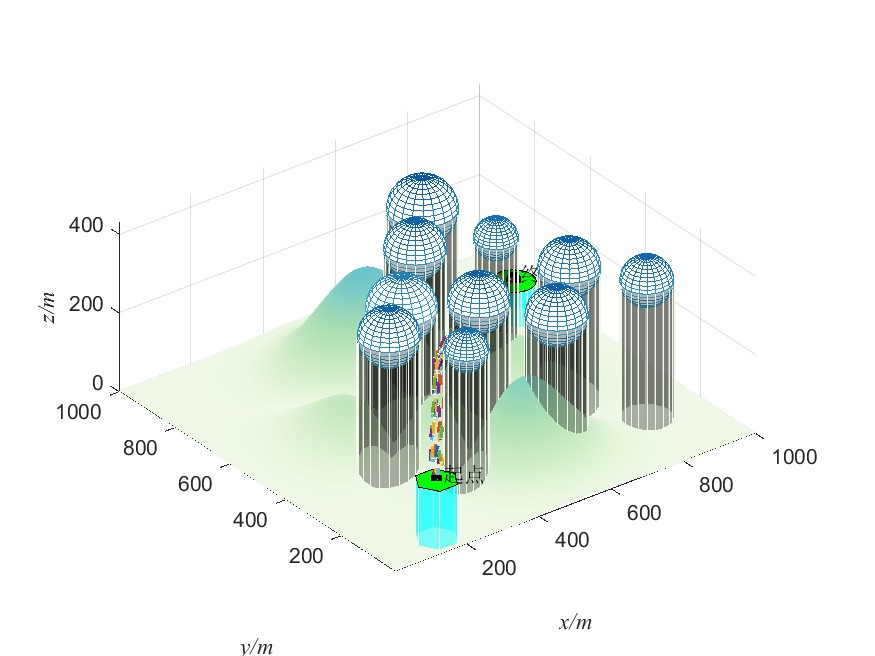
1. **Strategi pengoptimalan multi-tujuan**: Dalam perencanaan jalur UAV, beberapa tujuan perlu dipertimbangkan secara bersamaan, seperti panjang jalur, keselamatan, waktu penerbangan, dan batasan dinamis. Mengoptimalkan tujuan ini dapat membantu drone menemukan jalur optimal di lingkungan yang kompleks.
2. **Algoritma pencarian heuristik**: Algoritme pencarian heuristik tradisional, seperti algoritma A*, telah digunakan untuk perencanaan jalur UAV. Namun, algoritme ini mungkin menghadapi tantangan efisiensi dan kecepatan konvergensi di lingkungan yang kompleks.
3. **Algoritma metaheuristik**: Untuk memecahkan masalah optimasi jalur, para peneliti telah mengadopsi algoritma heuristik yang lebih baik, seperti optimasi gerombolan partikel (PSO), algoritma genetika (GA) dan pengoptimal serigala abu-abu (GWO), Algoritma ini berfungsi baik dalam memecahkan masalah optimasi kombinatorial yang kompleks.
4. **Metode berbasis pembelajaran mesin**: Metode pembelajaran mendalam dan pembelajaran penguatan juga diterapkan pada perencanaan jalur drone, sehingga drone dapat belajar dari data sensor dan beradaptasi dengan lingkungan yang kompleks.
5. **Perencanaan kolaboratif multi-agen**: Dalam sistem multi-UAV, perencanaan kolaboratif sangatlah penting. Hal ini melibatkan alokasi tugas, perencanaan jalur, dan pengambilan keputusan kolaboratif untuk memastikan kerja sama dan pembagian sumber daya antar drone.
6. **Peta presisi tinggi dan fusi sensor**: Menggabungkan data peta dan data sensor presisi tinggi, seperti GPS, lidar, dan kamera, dapat meningkatkan akurasi navigasi drone dan beradaptasi dengan lingkungan yang dinamis.
7. **Kemampuan beradaptasi lingkungan dinamis**: Algoritme perencanaan jalur UAV harus memiliki kemampuan untuk memahami dan beradaptasi terhadap perubahan lingkungan secara real-time untuk mengatasi perubahan hambatan dinamis dan kondisi meteorologi.
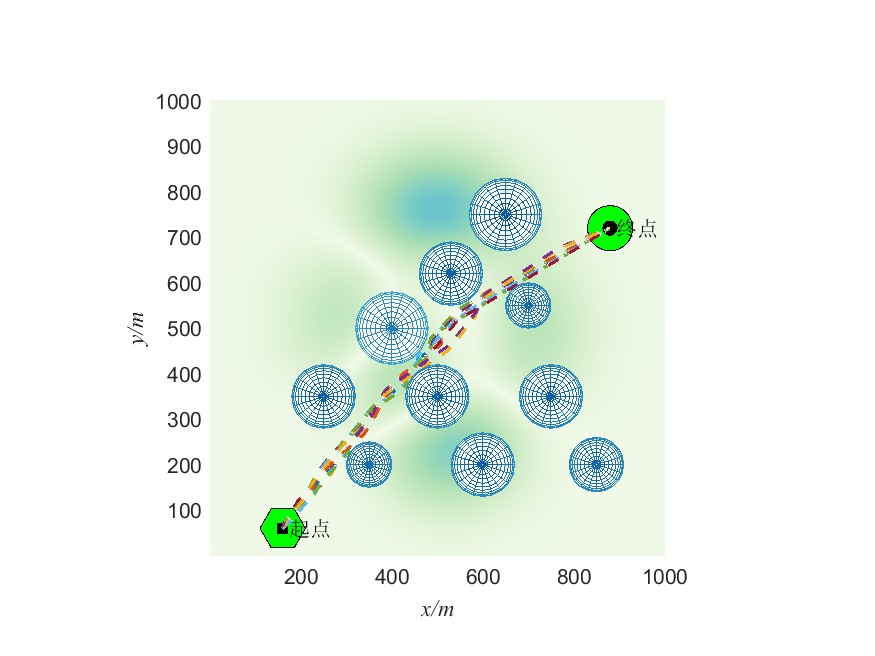
8. **Algoritma optimasi kawanan partikel multi-tujuan berdasarkan variabel navigasi (NMOPSO)**: Ini adalah algoritma untuk perencanaan jalur penghindaran rintangan UAV di lingkungan pegunungan yang kompleks. Algoritma ini menggunakan variabel navigasi untuk menggambarkan sikap penerbangan UAV. dan menemukan jalur yang aman dan efisien melalui teknologi optimasi multi-tujuan.
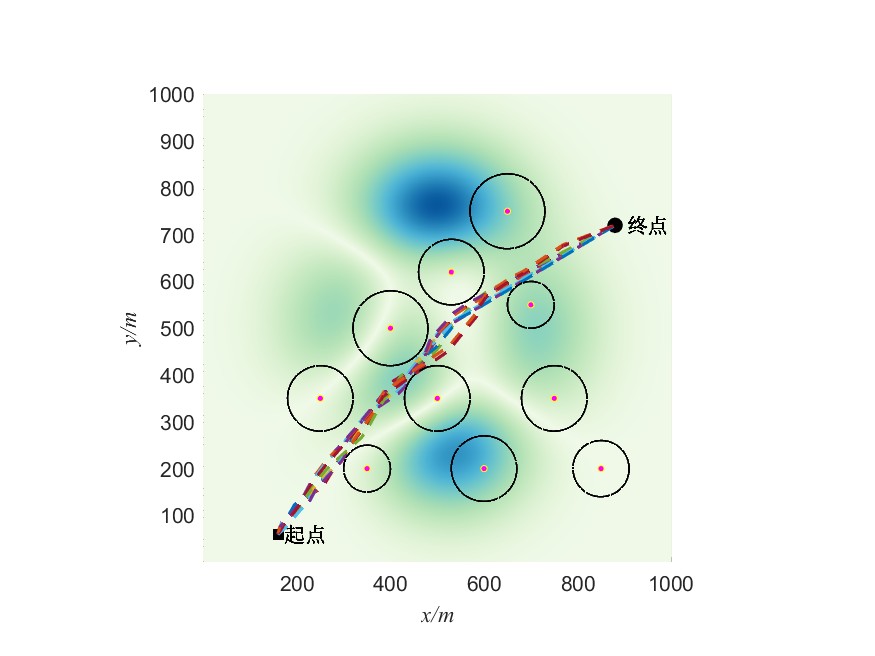
9. **Strategi pengoptimalan multi-tujuan dengan mempertimbangkan kendala saluran penerbangan yang aman**: Di lingkungan yang kompleks, seperti tambang batu bara bawah tanah, mengoptimalkan saluran penerbangan dan lintasan penerbangan yang aman sangat penting untuk memastikan keselamatan penerbangan UAV. Algoritma yang diusulkan menghasilkan lintasan penerbangan dengan kinerja komprehensif yang lebih baik dengan menyesuaikan vektor normal setengah bidang dalam proses menghasilkan saluran penerbangan yang aman dan menggunakan fungsi multi-tujuan untuk memodelkan dan mengoptimalkan indikator kinerja lintasan UAV.
Melalui penerapan komprehensif metode dan algoritma ini, solusi optimasi multi-tujuan untuk perencanaan jalur UAV dapat meningkatkan efisiensi dan efektivitas perencanaan jalur sekaligus memastikan keselamatan. Penelitian di masa depan akan terus mendorong pengembangan algoritma untuk beradaptasi dengan lingkungan yang lebih kompleks dan dinamis.


Ia telah mengabdikan dirinya untuk meneliti teknologi selama lebih dari 30 tahun, dan mahir dalam berbagai bahasa seperti java, linux, javascript, php, css, dll. Saya telah memberikan banyak kontribusi di bidang dokumentasi pengembang open source untuk berbagi beberapa masalah dalam pengembangan teknologi untuk referensi di masa mendatang.

Surat[email protected]