minhas informações de contato
Correspondência[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
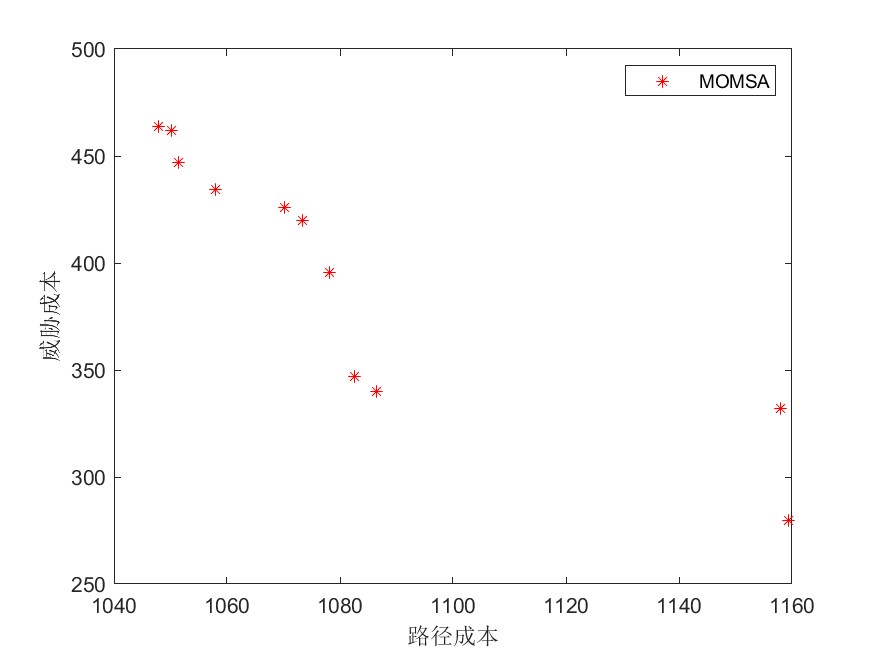
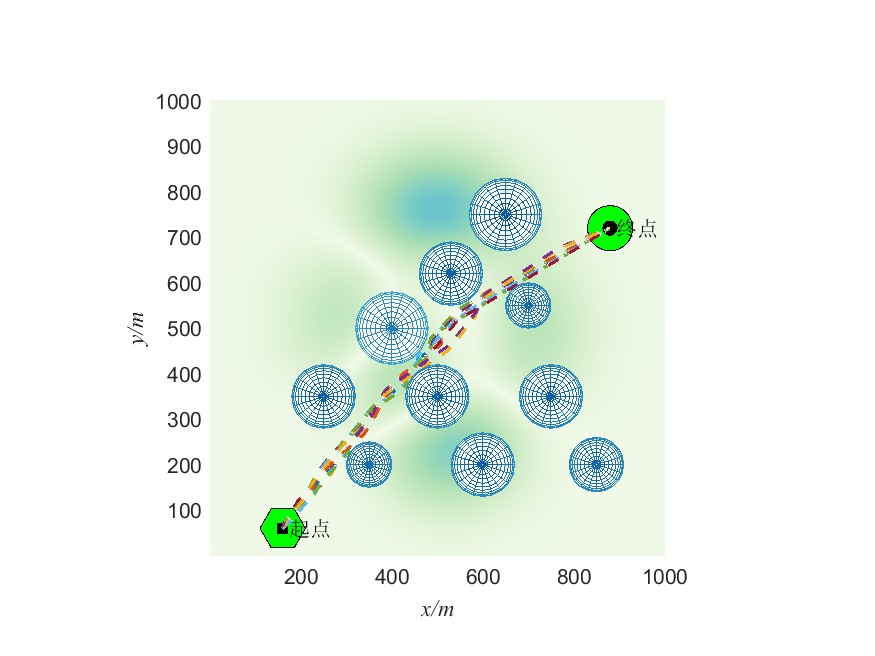
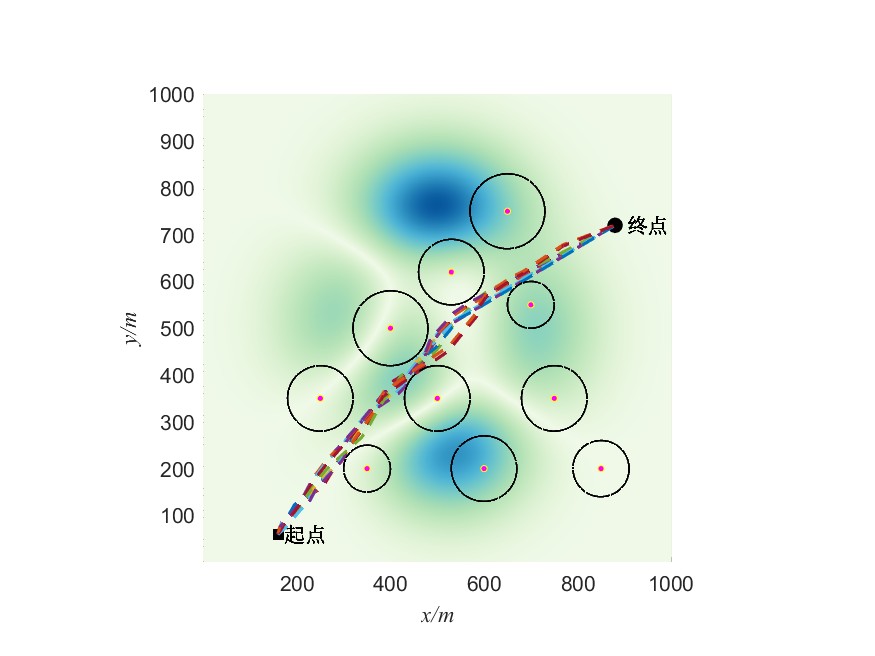
A solução de otimização multiobjetivo para planejamento de trajetória de UAV é um processo complexo, envolvendo a consideração de múltiplos objetivos e a aplicação de algoritmos de otimização. Aqui está uma visão geral de alguns pontos-chave e algoritmos relacionados:
1. **Estratégia de otimização multiobjetivo**: No planejamento de trajetória de UAV, múltiplos objetivos precisam ser considerados simultaneamente, como comprimento de trajetória, segurança, tempo de voo e restrições dinâmicas. A otimização desses objetivos pode ajudar os drones a encontrar caminhos ideais em ambientes complexos.
2. **Algoritmo de busca heurística**: Algoritmos de busca heurística tradicionais, como o algoritmo A*, têm sido usados para planejamento de caminho de UAV. No entanto, esses algoritmos podem enfrentar desafios de eficiência e velocidade de convergência em ambientes complexos.
3. **Algoritmo metaheurístico**: Para resolver o problema de otimização de caminho, os pesquisadores adotaram algoritmos heurísticos aprimorados, como otimização por enxame de partículas (PSO), algoritmo genético (GA) e otimizador de lobo cinzento (GWO). bem na resolução de problemas complexos de otimização combinatória.
4. **Métodos baseados em aprendizado de máquina**: Métodos de aprendizado profundo e aprendizado por reforço também são aplicados ao planejamento de trajetórias de drones, permitindo que os drones aprendam com os dados dos sensores e se adaptem a ambientes complexos.
5. **Planejamento colaborativo multiagente**: Em sistemas multi-UAV, o planejamento colaborativo é particularmente importante. Isto envolve atribuição de tarefas, planeamento de caminhos e tomada de decisão colaborativa para garantir a cooperação e a partilha de recursos entre drones.
6. **Mapa de alta precisão e fusão de sensores**: A combinação de dados de mapas de alta precisão e dados de sensores, como GPS, lidar e câmeras, pode melhorar a precisão da navegação do drone e se adaptar a ambientes dinâmicos.
7. **Adaptação ambiental dinâmica**: Os algoritmos de planejamento de trajetória de UAV precisam ter a capacidade de perceber e se adaptar às mudanças ambientais em tempo real para lidar com as mudanças nos obstáculos dinâmicos e nas condições meteorológicas.
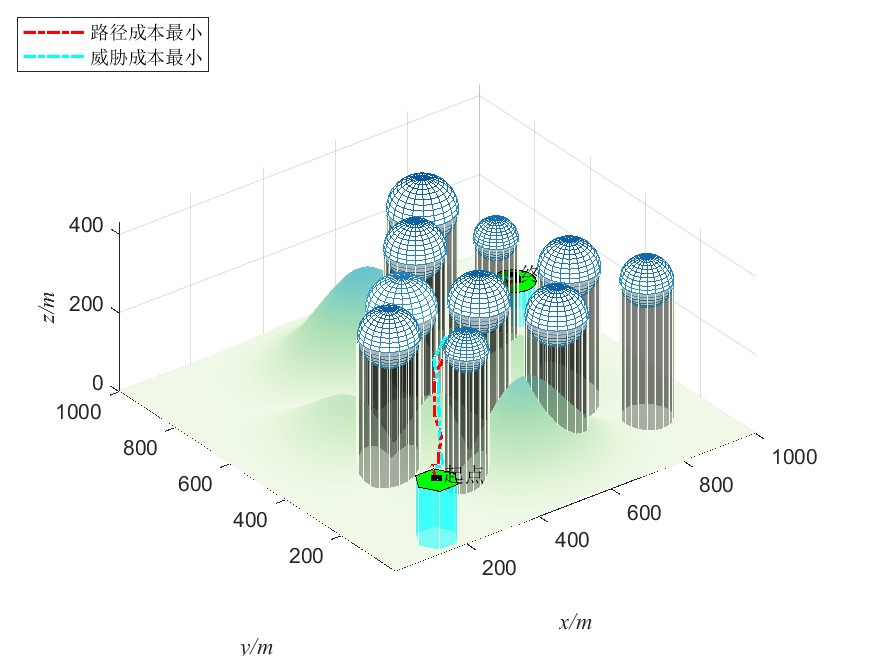
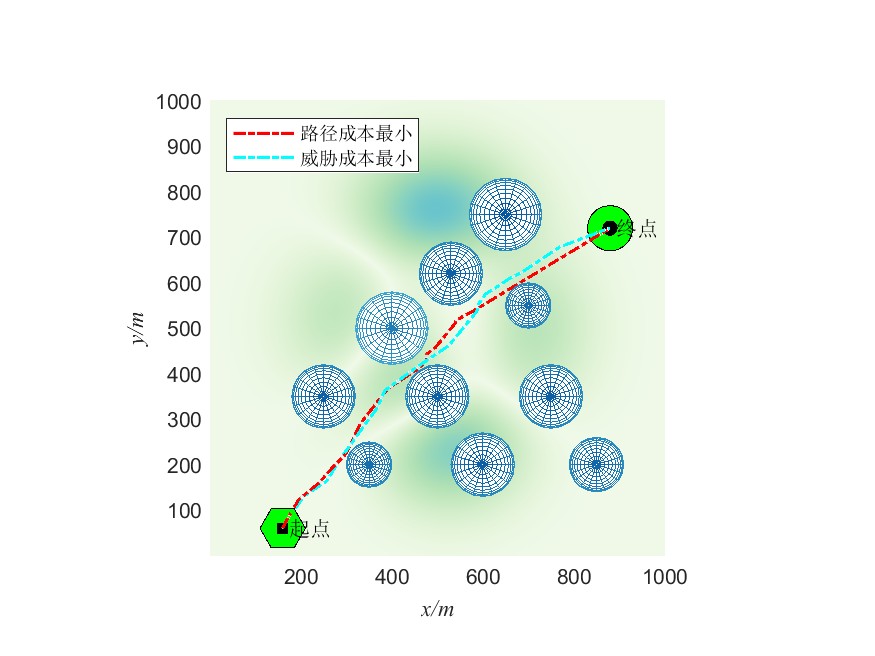
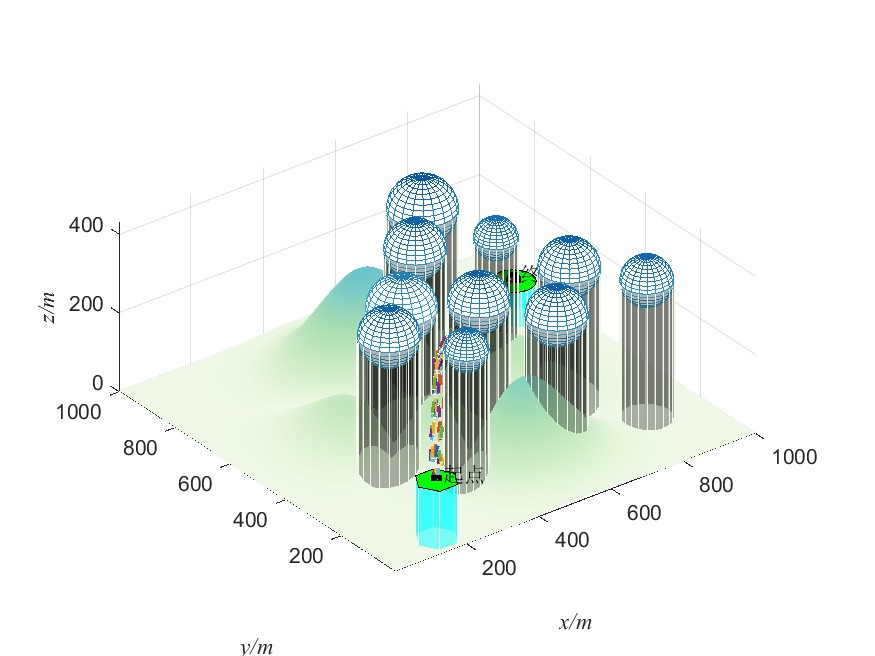
8. **Algoritmo de otimização de enxame de partículas multiobjetivo baseado em variáveis de navegação (NMOPSO)**: Este é um algoritmo para planejamento de trajetória para evitar obstáculos de UAV em ambientes montanhosos complexos. e encontrar caminhos seguros e eficientes por meio de tecnologia de otimização multiobjetivo.
9. **Estratégia de otimização multiobjetivo considerando restrições de canais de voo seguros**: Em ambientes complexos, como minas subterrâneas de carvão, otimizar canais de voo seguros e trajetórias de voo é crucial para garantir a segurança de voo dos UAVs. O algoritmo proposto gera uma trajetória de voo com melhor desempenho abrangente ajustando o vetor normal do meio plano no processo de geração de um canal de voo seguro e utilizando funções multiobjetivo para modelar e otimizar os indicadores de desempenho da trajetória do UAV.
Através da aplicação abrangente desses métodos e algoritmos, soluções de otimização multiobjetivo para planejamento de rotas de UAV podem melhorar a eficiência e eficácia do planejamento de rotas, garantindo ao mesmo tempo a segurança. Pesquisas futuras continuarão a impulsionar o desenvolvimento de algoritmos para adaptação a ambientes mais complexos e dinâmicos.


Ele se dedica à pesquisa de tecnologia há mais de 30 anos e é proficiente em diversas linguagens como java, linux, javascript, php, css, etc. estação de documentação do desenvolvedor para compartilhar alguns problemas no desenvolvimento de tecnologia para referência futura.

Correspondência[email protected]