2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Multi-obiectiva optimae solutionis in via consilio UAV processus complexus est, involvit considerationem plurium proposita et applicationem optimization algorithm. Hic est inspectio nonnullorum carduum et algorithmorum affinium:
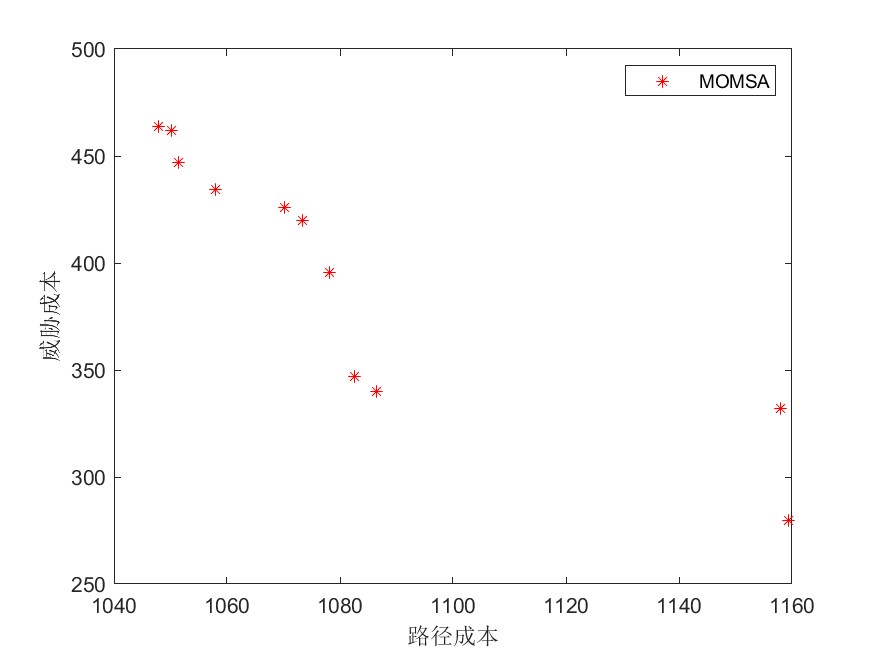
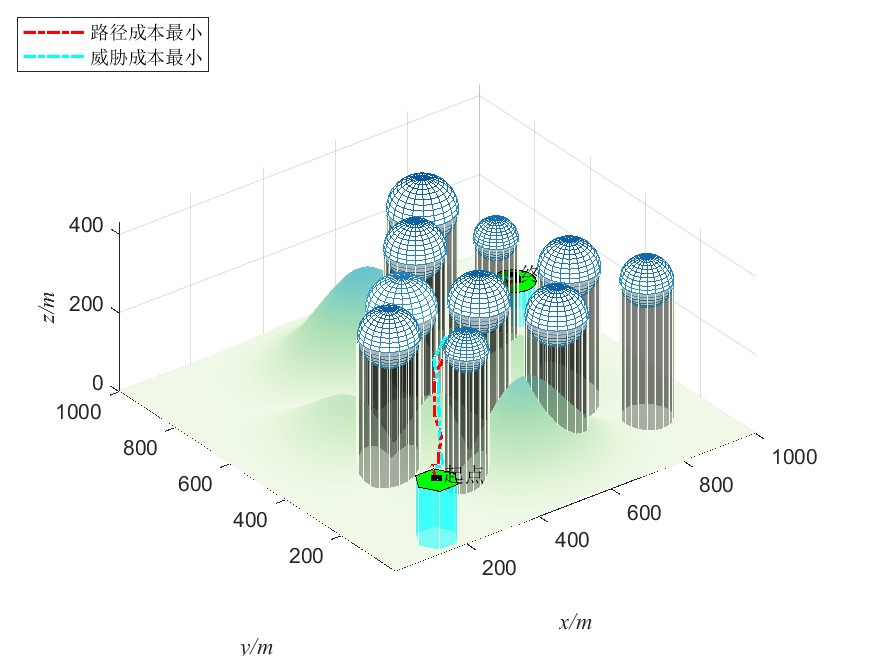
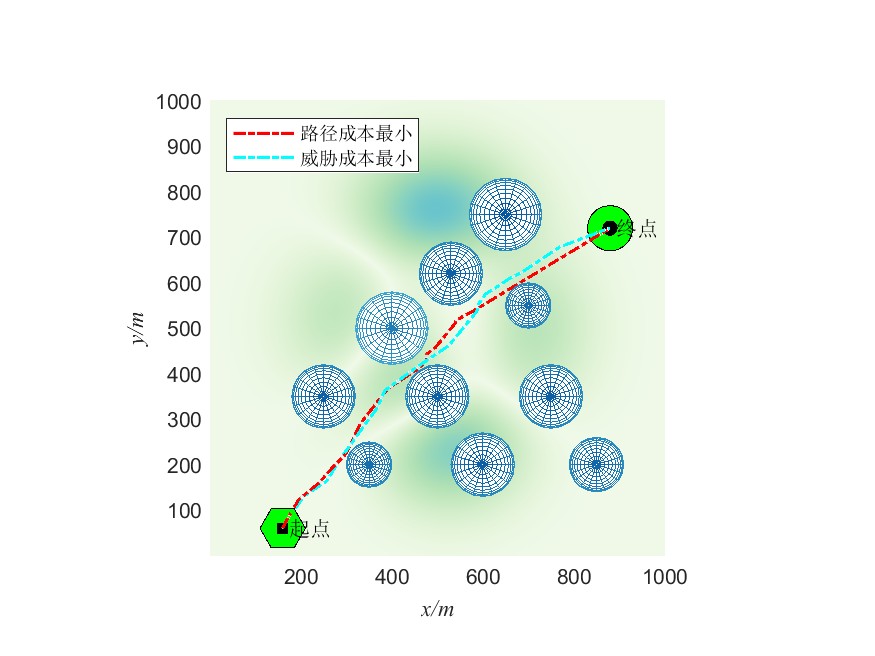
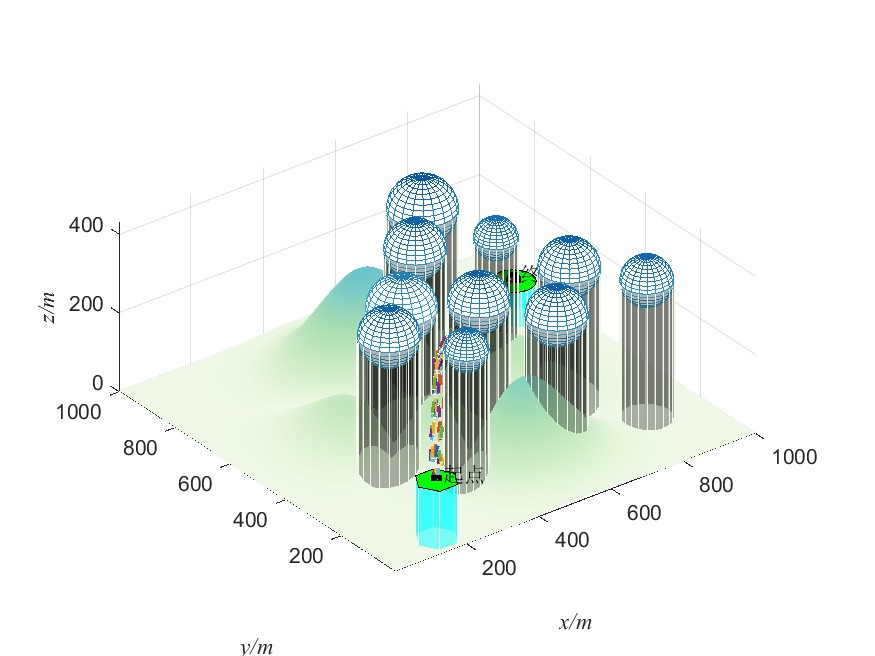
1. Multi-obiectivi optimae rationes consiliorum: In consilio UAV via, multa proposita simul considerari debent, sicut longitudo, salus, fuga temporis et angustiae dynamicae. Optimizing has metas fuci adiuvare possunt vias optimas in ambitu complexu reperire.
2. ** Inquisitio heuristica algorithmus: Traditionalis heuristica investigatio algorithmorum, sicut A* algorithmus, pro UAV iter consilio adhibitum est. Nihilominus haec algorithms efficere possunt efficaciam et concursum celeritatis provocationes in complexionibus ambiendis.
3. Algorithmus metaheuristicus**: Ad solvendam optimizationem problemati viam, investigatores algorithmos heuristicos emendare conati sunt, ut particula optimiizationis examen (PSO), algorithmus geneticus (GA) et lupus griseus optimizer (GWO), Hae algorithmi praestant. bene in solvendo optimization difficultates compositas combinatoriales.
4. Machina discendi methodi fundatae**: Alta doctrina et supplementum methodi discendi etiam applicantur ad viam fuci consilio, ut fuci ad discendum a notitia sensoriis et complexionibus ambiendis adaptentur.
5. Multi-agente consilio collaborativo: In multi-UAV systematibus, collaborativa ratio magni momenti est. Hoc negotium destinatio involvit, iter consilium et collaborativam deliberationem ad cooperationem et subsidia communicationis inter fucos curandi.
6. Tabula summa praecisio et fusione sensoria: Coniungendo tabulam altam praecisionem datam et datam sensorem, sicut GPS, lidarum et camerarum, subtiliter fuci navigationis emendare possunt et ad ambitus dynamicos accommodare.
7. Accommodabilitas dynamicae ambitus**: UAV iter algorithms parare opus est habere facultatem percipiendi et accommodandi ad mutationes environmental in tempore reali ad tolerandas mutationes in impedimentis dynamicis et condicionibus meteorologicis.
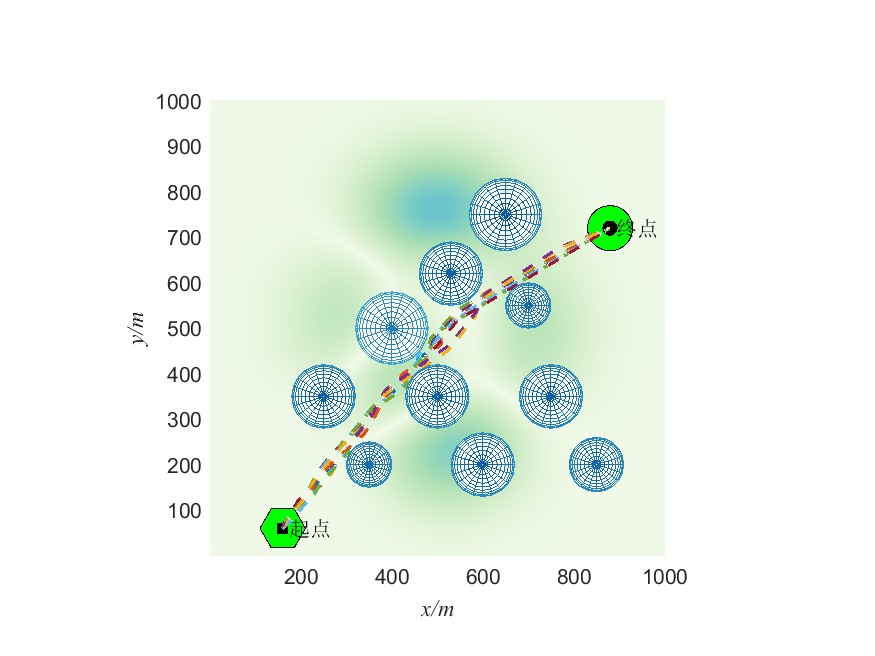
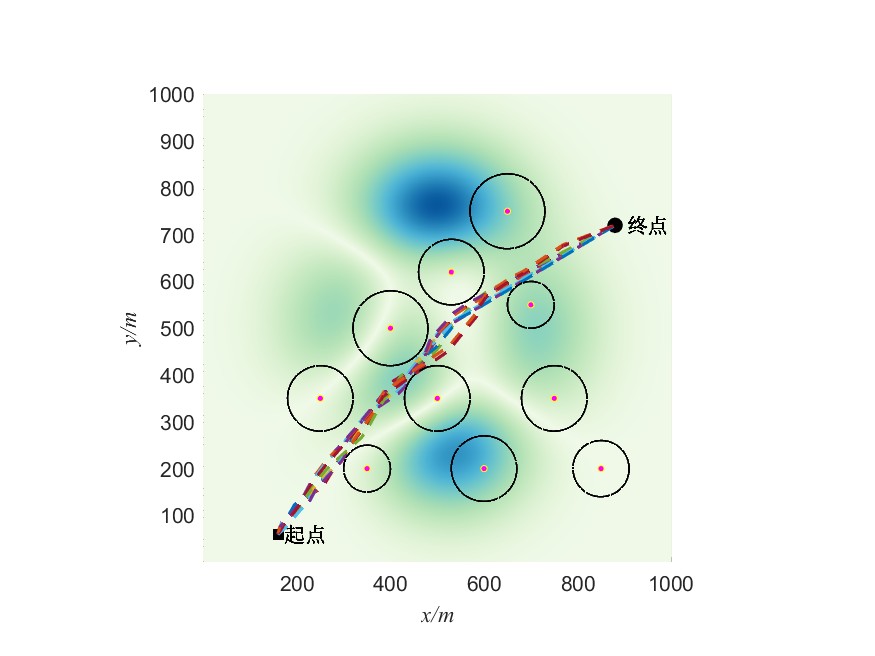
8. ** Particula multi-objectiva optimiizationis algorithmus examinans in variabilium navigantium (NMOPSO)**: Hoc est algorithmus ob impedimentum fugae iter UAV destinatum in complexionibus montanis ambitibus. et vias tutas et efficaces inveniant per technologiam multi-obiectivum optimiizationis.
9. Multi-obiectivi optimae rationes considerantes tutum fugae canalis angustias**: In ambitus complexi, sicut fodina carbonaria subterranei, optimizing canales fugae tutos et trajectorias fugae pendet ad salutem fugae UAVs. Propositum algorithmus fugam trajectoriam cum melioribus effectibus comprehensivis generat, componendo vectorem semiplanum normalem in processu alvei fugae tutam generandi et utens multi-obiectivis functionibus ad exemplar et optimize effectus indices trajectoriae UAV.
Per applicationem comprehensivam harum methodorum et algorithmarum solutiones optimizationum multi-obiectivarum pro UAV consilio viarum possunt emendare efficientiam et efficaciam viae dum ad salutem procurandam. Future investigationis perget progressionem algorithmorum pellere, ut ambitus magis implicatos et dynamicos accommodare.


technologiae technologiae plus quam 30 annos operam dedit et in variis linguis proficit ut java, linux, javascript, php, css, etc. Multas contributiones in aperto fonte campo fecit elit documentorum statione ad communicandas quaestiones in technologia progressus ad futuram referentiam.
