le mie informazioni di contatto
Posta[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
La soluzione di ottimizzazione multi-obiettivo per la pianificazione del percorso dell'UAV è un processo complesso, che prevede la considerazione di più obiettivi e l'applicazione di algoritmi di ottimizzazione. Ecco una panoramica di alcuni punti chiave e dei relativi algoritmi:
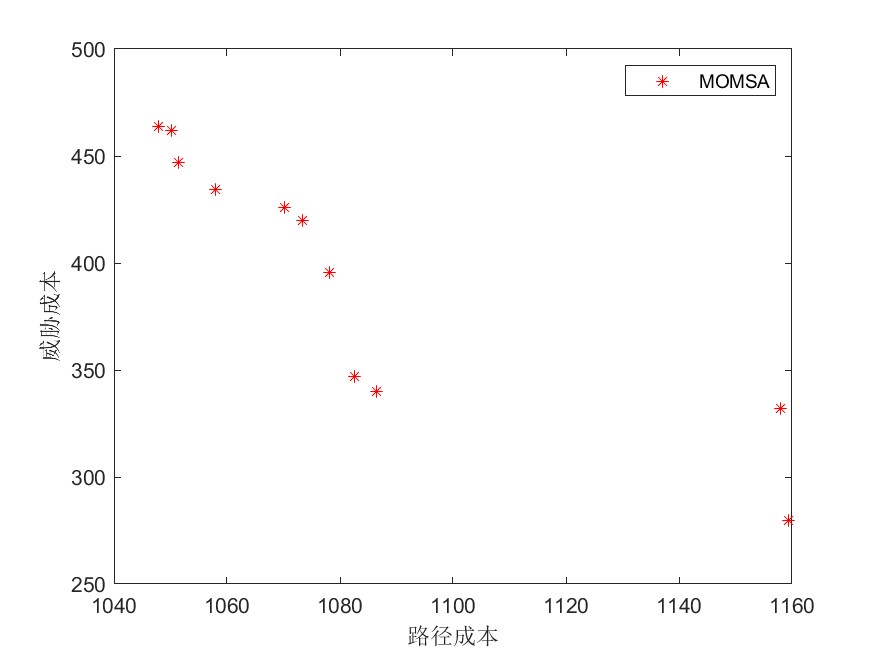
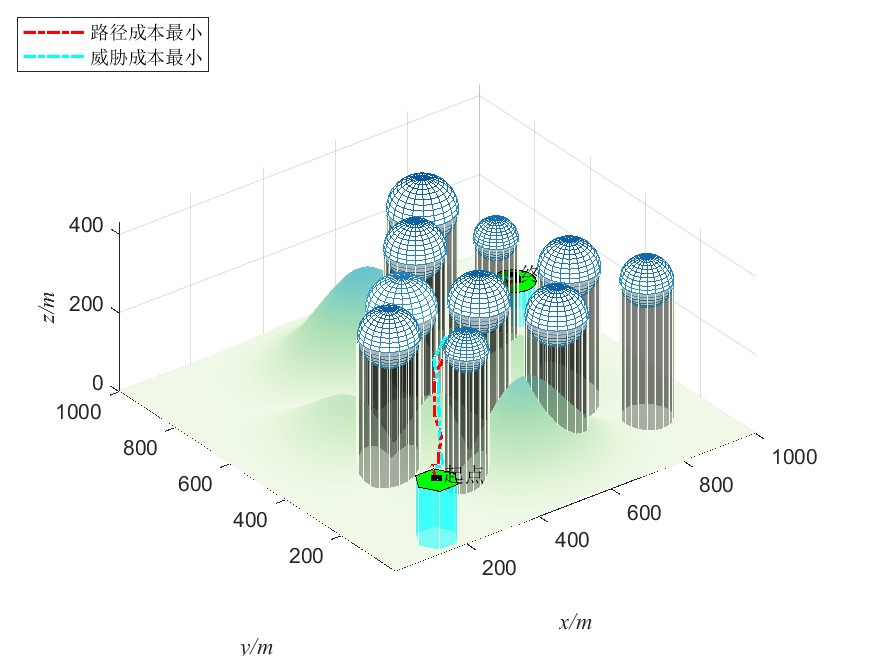
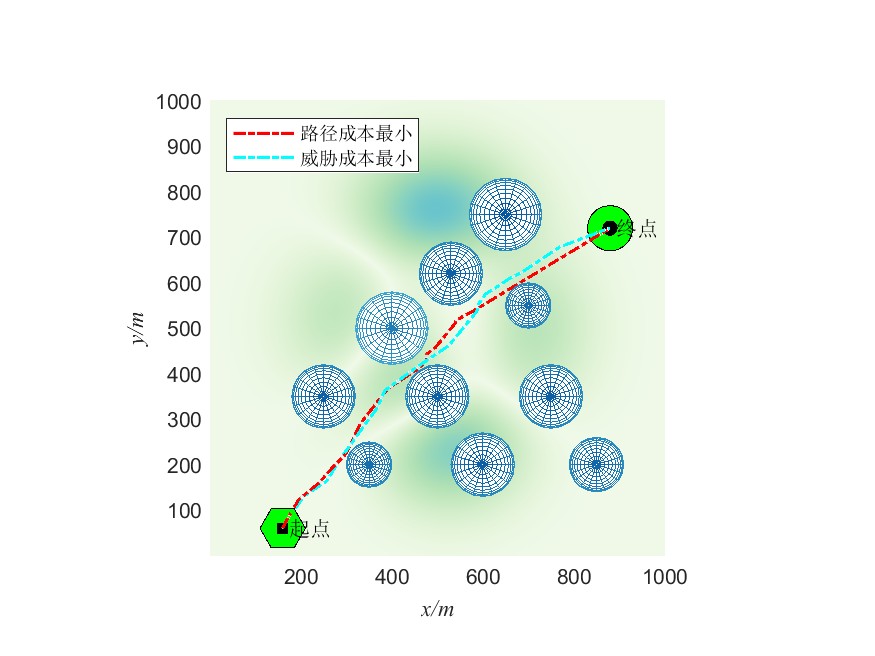
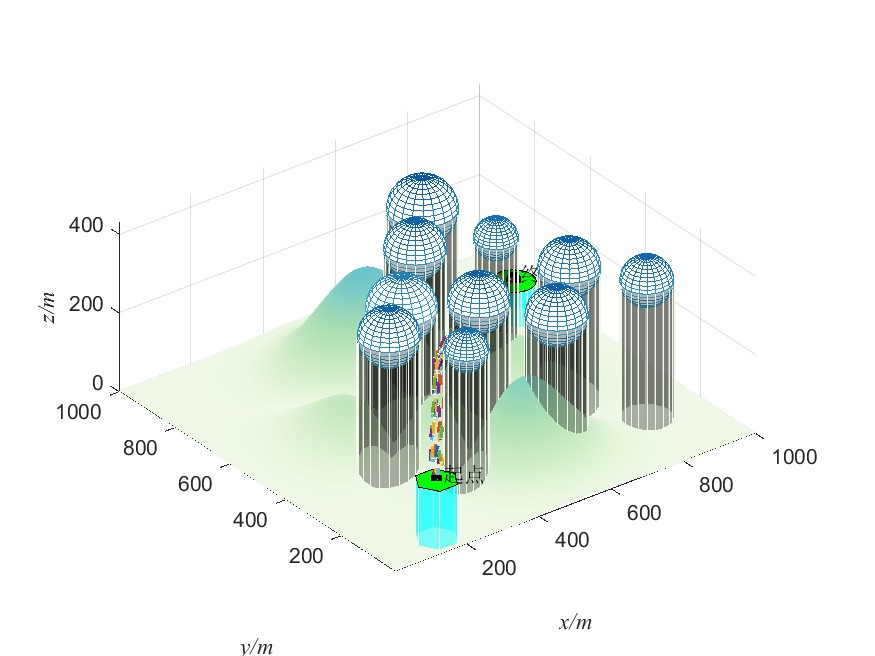
1. **Strategia di ottimizzazione multi-obiettivo**: nella pianificazione del percorso dell'UAV, è necessario considerare più obiettivi contemporaneamente, come la lunghezza del percorso, la sicurezza, il tempo di volo e i vincoli dinamici. L’ottimizzazione di questi obiettivi può aiutare i droni a trovare percorsi ottimali in ambienti complessi.
2. **Algoritmo di ricerca euristica**: gli algoritmi di ricerca euristica tradizionali, come l'algoritmo A*, sono stati utilizzati per la pianificazione del percorso dell'UAV. Tuttavia, questi algoritmi potrebbero dover affrontare sfide in termini di efficienza e velocità di convergenza in ambienti complessi.
3. **Algoritmo metaeuristico**: per risolvere il problema dell'ottimizzazione del percorso, i ricercatori hanno adottato algoritmi euristici migliorati, come l'ottimizzazione dello sciame di particelle (PSO), l'algoritmo genetico (GA) e l'ottimizzatore del lupo grigio (GWO). Questi algoritmi eseguono nel risolvere problemi complessi di ottimizzazione combinatoria.
4. **Metodi basati sull'apprendimento automatico**: i metodi di deep learning e apprendimento per rinforzo vengono applicati anche alla pianificazione del percorso dei droni, consentendo ai droni di apprendere dai dati dei sensori e di adattarsi ad ambienti complessi.
5. **Pianificazione collaborativa multi-agente**: nei sistemi multi-UAV, la pianificazione collaborativa è particolarmente importante. Ciò comporta l’assegnazione dei compiti, la pianificazione del percorso e il processo decisionale collaborativo per garantire la cooperazione e la condivisione delle risorse tra i droni.
6. **Fusione di mappe e sensori ad alta precisione**: la combinazione di dati cartografici ad alta precisione e dati di sensori, come GPS, lidar e fotocamere, può migliorare la precisione della navigazione dei droni e adattarsi agli ambienti dinamici.
7. **Adattabilità dinamica dell'ambiente**: gli algoritmi di pianificazione del percorso degli UAV devono avere la capacità di percepire e adattarsi ai cambiamenti ambientali in tempo reale per far fronte ai cambiamenti degli ostacoli dinamici e delle condizioni meteorologiche.
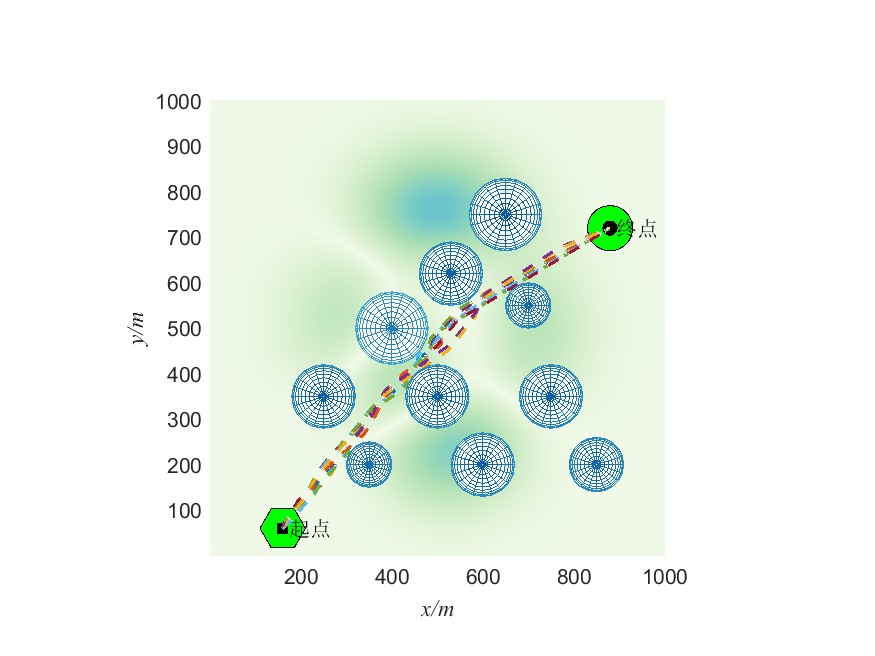
8. **Algoritmo di ottimizzazione dello sciame di particelle multi-obiettivo basato su variabili di navigazione (NMOPSO)**: questo è un algoritmo per la pianificazione del percorso di evitamento degli ostacoli dell'UAV in ambienti montani complessi. Utilizza variabili di navigazione per descrivere l'assetto di volo dell'UAV. e trovare percorsi sicuri ed efficienti attraverso la tecnologia di ottimizzazione multi-obiettivo.
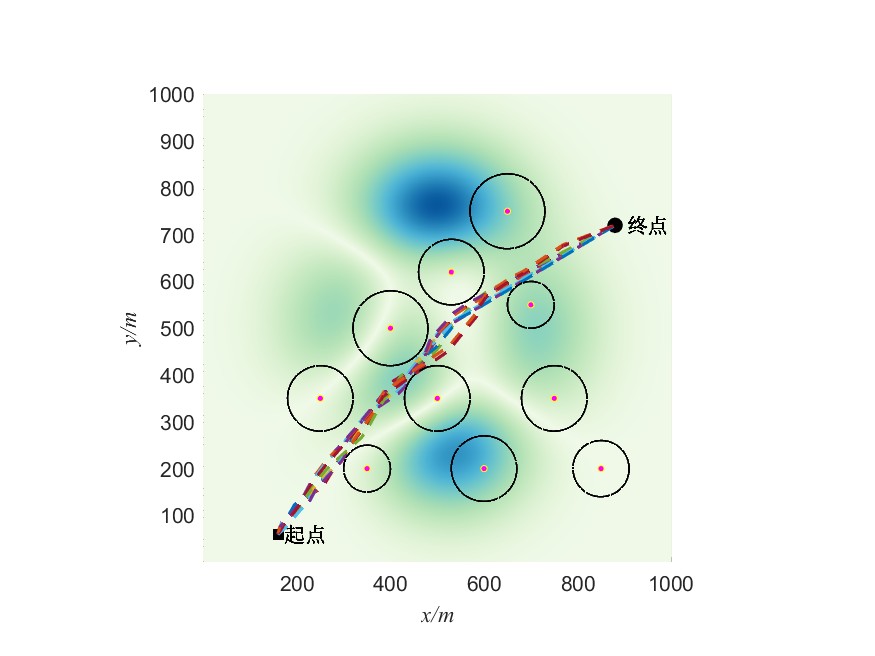
9. **Strategia di ottimizzazione multi-obiettivo considerando i vincoli dei canali di volo sicuri**: in ambienti complessi, come le miniere di carbone sotterranee, l'ottimizzazione dei canali di volo sicuri e delle traiettorie di volo è fondamentale per garantire la sicurezza di volo degli UAV. L'algoritmo proposto genera una traiettoria di volo con prestazioni globali migliori regolando il vettore normale del semipiano nel processo di generazione di un canale di volo sicuro e utilizzando funzioni multi-obiettivo per modellare e ottimizzare gli indicatori di prestazione della traiettoria dell'UAV.
Attraverso l'applicazione completa di questi metodi e algoritmi, le soluzioni di ottimizzazione multi-obiettivo per la pianificazione dei percorsi UAV possono migliorare l'efficienza e l'efficacia della pianificazione dei percorsi garantendo al tempo stesso la sicurezza. La ricerca futura continuerà a guidare lo sviluppo di algoritmi per adattarsi ad ambienti più complessi e dinamici.


Si dedica alla ricerca tecnologica da più di trent'anni, è esperto in vari linguaggi come java, linux, javascript, php, css, ecc., e ha apportato numerosi contributi nel campo dell'open source una stazione di documentazione per gli sviluppatori per condividere alcuni problemi nello sviluppo della tecnologia per riferimento futuro. Tutti la controllano

Posta[email protected]