τα στοιχεία επικοινωνίας μου
Ταχυδρομείο[email protected]
2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Η λύση βελτιστοποίησης πολλαπλών στόχων για τον σχεδιασμό διαδρομής UAV είναι μια σύνθετη διαδικασία, που περιλαμβάνει την εξέταση πολλαπλών στόχων και την εφαρμογή αλγορίθμων βελτιστοποίησης. Ακολουθεί μια επισκόπηση ορισμένων βασικών σημείων και σχετικών αλγορίθμων:
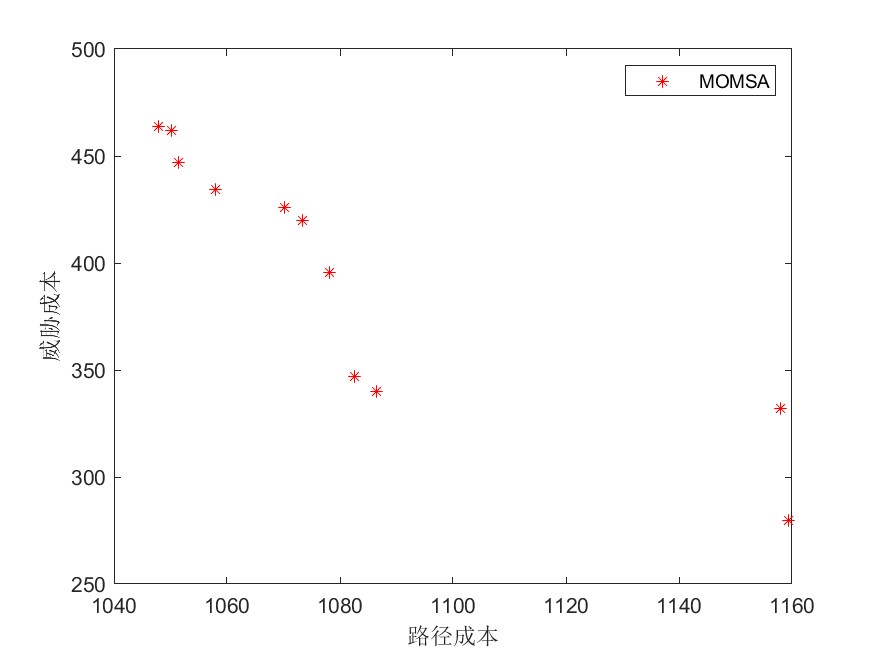
1. **Στρατηγική βελτιστοποίησης πολλαπλών στόχων**: Στον σχεδιασμό διαδρομής UAV, πρέπει να λαμβάνονται υπόψη πολλαπλοί στόχοι ταυτόχρονα, όπως το μήκος διαδρομής, η ασφάλεια, ο χρόνος πτήσης και οι δυναμικοί περιορισμοί. Η βελτιστοποίηση αυτών των στόχων μπορεί να βοηθήσει τα drones να βρουν βέλτιστες διαδρομές σε πολύπλοκα περιβάλλοντα.
2. **Ευριστικός αλγόριθμος αναζήτησης**: Παραδοσιακοί ευρετικοί αλγόριθμοι αναζήτησης, όπως ο αλγόριθμος A*, έχουν χρησιμοποιηθεί για τον σχεδιασμό διαδρομής UAV. Ωστόσο, αυτοί οι αλγόριθμοι ενδέχεται να αντιμετωπίσουν προκλήσεις απόδοσης και ταχύτητας σύγκλισης σε πολύπλοκα περιβάλλοντα.
3. **Μεταευρετικός αλγόριθμος**: Για την επίλυση του προβλήματος βελτιστοποίησης διαδρομής, οι ερευνητές έχουν υιοθετήσει βελτιωμένους ευρετικούς αλγόριθμους, όπως η βελτιστοποίηση σμήνος σωματιδίων (PSO), ο γενετικός αλγόριθμος (GA) και ο βελτιστοποιητής γκρίζου λύκου (GWO). Αυτοί οι αλγόριθμοι εκτελούν στην επίλυση σύνθετων προβλημάτων συνδυαστικής βελτιστοποίησης.
4. **Μέθοδοι που βασίζονται σε μηχανική μάθηση**: Οι μέθοδοι βαθιάς μάθησης και ενίσχυσης μάθησης εφαρμόζονται επίσης στον σχεδιασμό διαδρομής drone, επιτρέποντας στα drones να μαθαίνουν από δεδομένα αισθητήρων και να προσαρμόζονται σε πολύπλοκα περιβάλλοντα.
5. **Συνεργατικός σχεδιασμός πολλαπλών πρακτόρων**: Στα συστήματα πολλαπλών UAV, ο συνεργατικός σχεδιασμός είναι ιδιαίτερα σημαντικός. Αυτό περιλαμβάνει την κατανομή εργασιών, τον σχεδιασμό διαδρομής και τη συλλογική λήψη αποφάσεων για τη διασφάλιση της συνεργασίας και της κοινής χρήσης πόρων μεταξύ των drones.
6. **Χάρτης υψηλής ακρίβειας και σύντηξη αισθητήρων**: Ο συνδυασμός δεδομένων χαρτών υψηλής ακρίβειας και δεδομένων αισθητήρων, όπως GPS, lidar και κάμερες, μπορεί να βελτιώσει την ακρίβεια της πλοήγησης με drone και να προσαρμοστεί σε δυναμικά περιβάλλοντα.
7. **Δυναμική προσαρμοστικότητα περιβάλλοντος**: Οι αλγόριθμοι σχεδιασμού διαδρομής UAV πρέπει να έχουν την ικανότητα να αντιλαμβάνονται και να προσαρμόζονται στις περιβαλλοντικές αλλαγές σε πραγματικό χρόνο για να αντιμετωπίζουν αλλαγές σε δυναμικά εμπόδια και μετεωρολογικές συνθήκες.
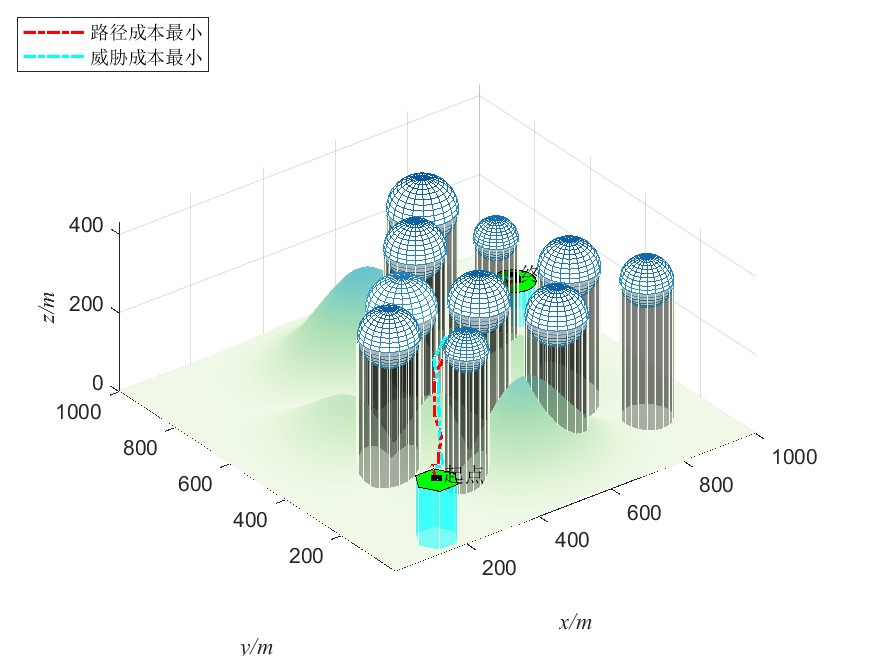
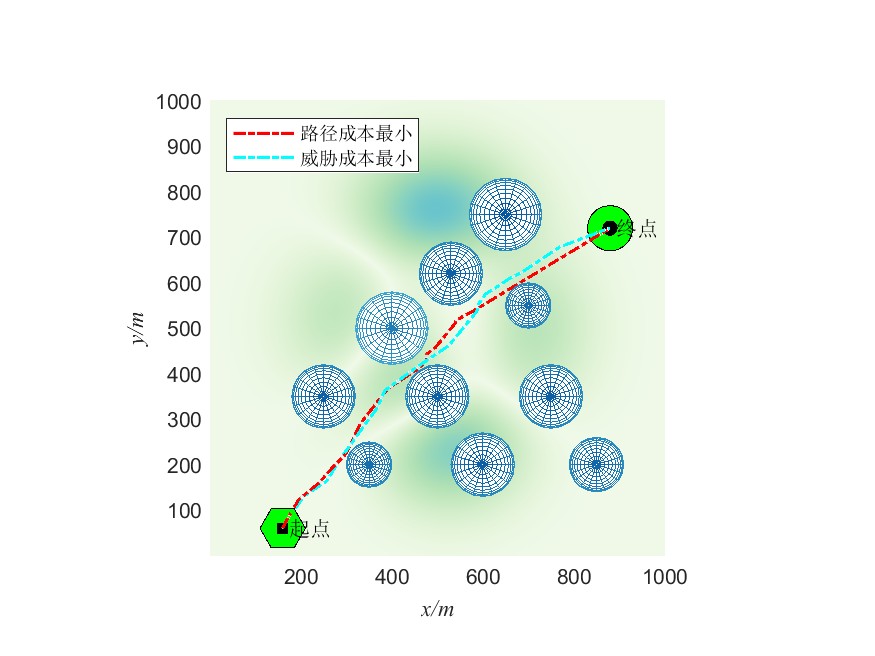
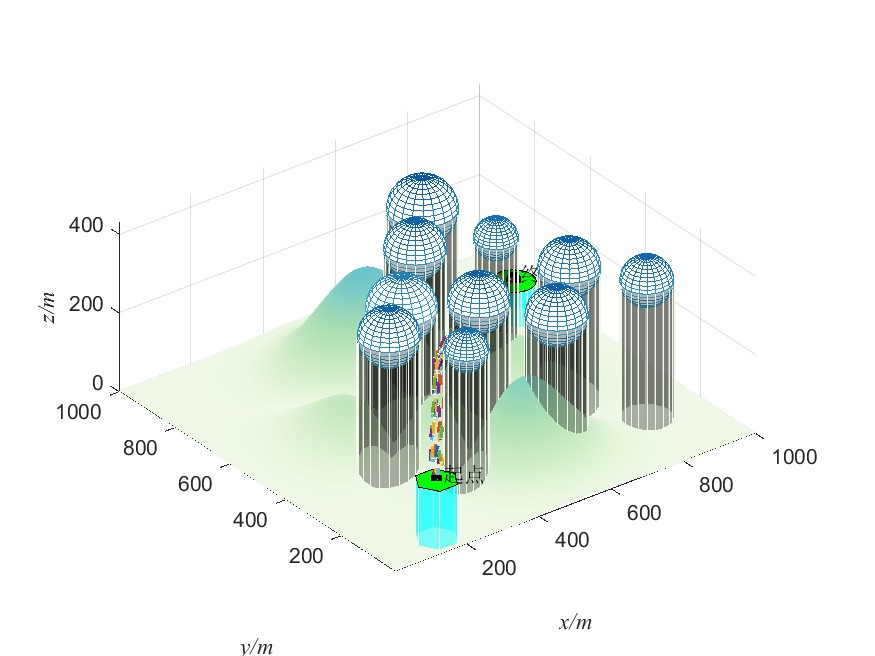
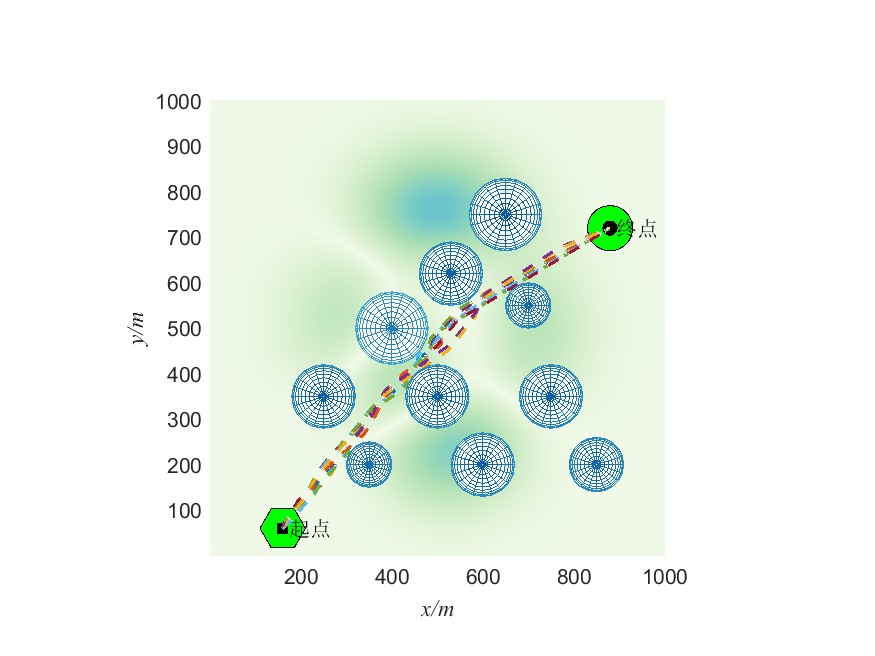
8. **Αλγόριθμος βελτιστοποίησης σμήνος σωματιδίων με βάση τις μεταβλητές πλοήγησης (NMOPSO)**: Αυτός είναι ένας αλγόριθμος για τον σχεδιασμό διαδρομής αποφυγής εμποδίων σε σύνθετα ορεινά περιβάλλοντα. και βρείτε ασφαλείς και αποτελεσματικές διαδρομές μέσω της τεχνολογίας βελτιστοποίησης πολλαπλών στόχων.
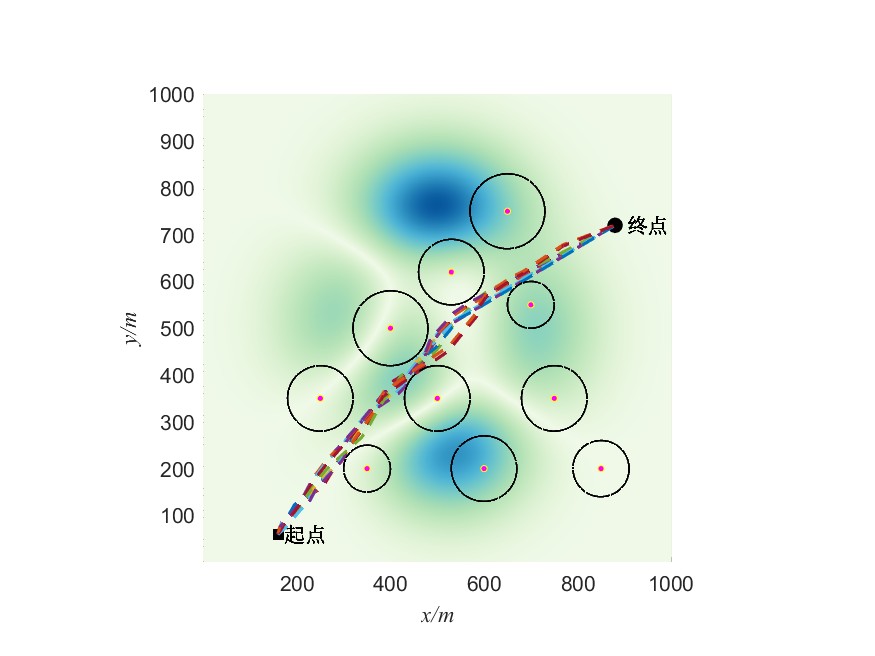
9. **Πολλαπλών στόχων στρατηγική βελτιστοποίησης λαμβάνοντας υπόψη τους περιορισμούς ασφαλούς καναλιού πτήσης**: Σε πολύπλοκα περιβάλλοντα, όπως υπόγεια ανθρακωρυχεία, η βελτιστοποίηση ασφαλών καναλιών πτήσης και τροχιών πτήσης είναι ζωτικής σημασίας για τη διασφάλιση της ασφάλειας πτήσης των UAV. Ο προτεινόμενος αλγόριθμος δημιουργεί μια τροχιά πτήσης με καλύτερη συνολική απόδοση προσαρμόζοντας το κανονικό διάνυσμα μισού επιπέδου στη διαδικασία δημιουργίας ενός ασφαλούς καναλιού πτήσης και χρησιμοποιώντας συναρτήσεις πολλαπλών στόχων για τη μοντελοποίηση και τη βελτιστοποίηση των δεικτών απόδοσης της τροχιάς UAV.
Μέσω της ολοκληρωμένης εφαρμογής αυτών των μεθόδων και αλγορίθμων, οι λύσεις βελτιστοποίησης πολλαπλών στόχων για τον σχεδιασμό διαδρομής UAV μπορούν να βελτιώσουν την αποδοτικότητα και την αποτελεσματικότητα του σχεδιασμού διαδρομής διασφαλίζοντας ταυτόχρονα την ασφάλεια. Η μελλοντική έρευνα θα συνεχίσει να οδηγεί την ανάπτυξη αλγορίθμων για προσαρμογή σε πιο πολύπλοκα και δυναμικά περιβάλλοντα.


Έχει αφοσιωθεί στην έρευνα της τεχνολογίας για περισσότερα από 30 χρόνια και είναι ικανός σε διάφορες γλώσσες όπως java, linux, javascript, php, css κ.λπ. Έχει κάνει πολλές συνεισφορές στον τομέα του ανοιχτού κώδικα σταθμός τεκμηρίωσης προγραμματιστή για να μοιραστείτε ορισμένα ζητήματα στην ανάπτυξη τεχνολογίας για μελλοντική αναφορά

Ταχυδρομείο[email protected]