2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
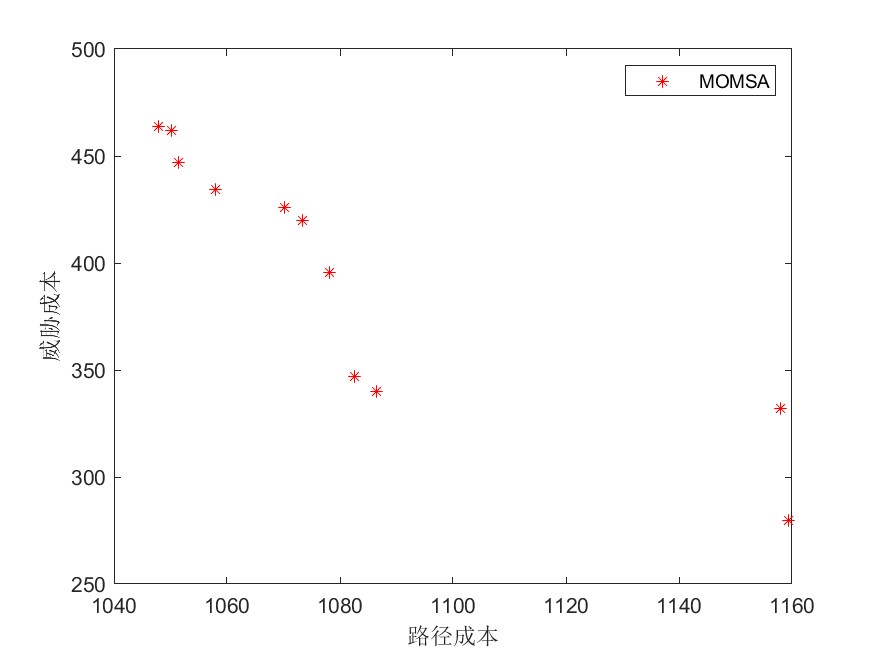
Une solution d'optimisation multi-objectifs pour la planification de trajectoire d'UAV est un processus complexe, impliquant la prise en compte de plusieurs objectifs et l'application d'algorithmes d'optimisation. Voici un aperçu de quelques points clés et des algorithmes associés :
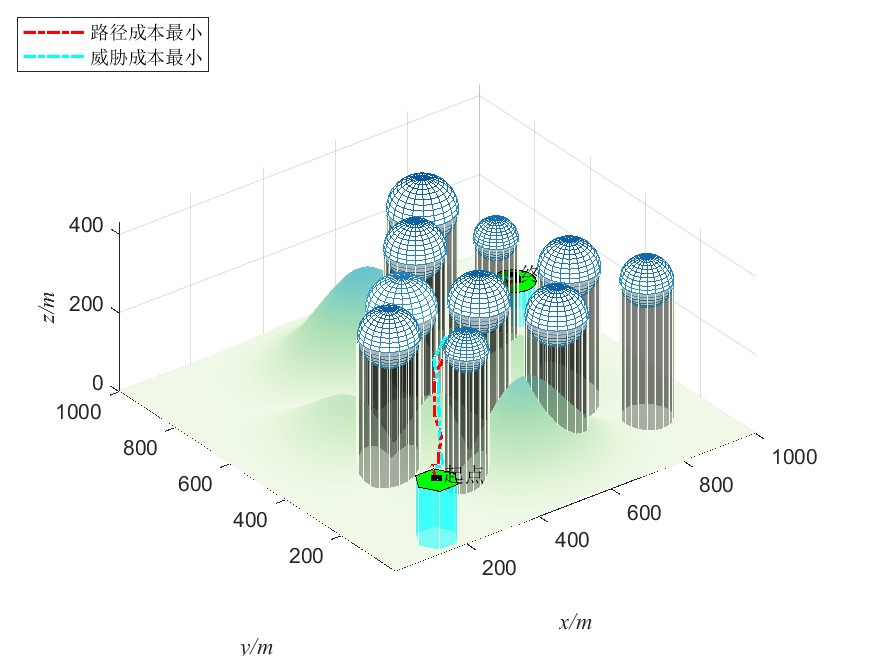
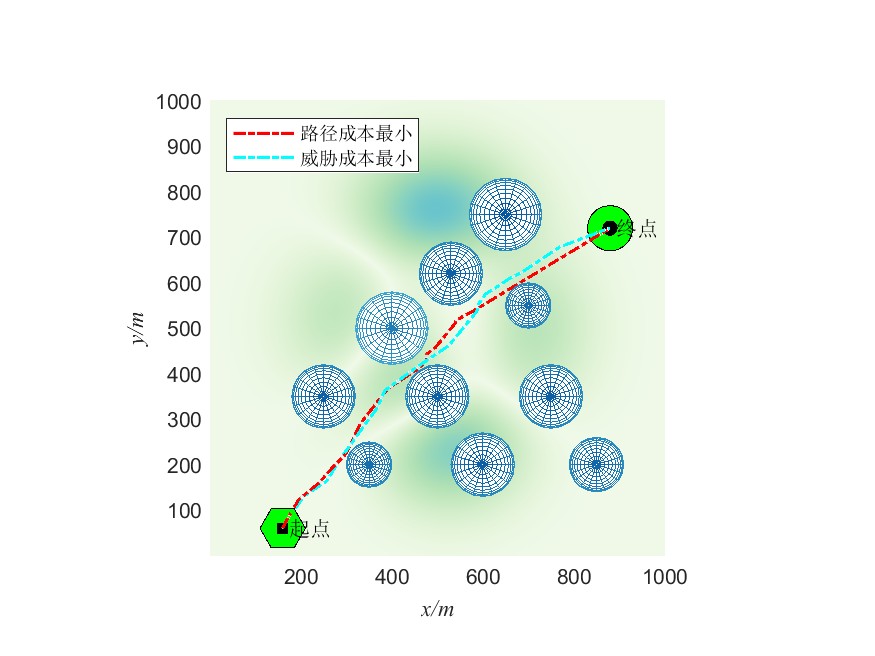
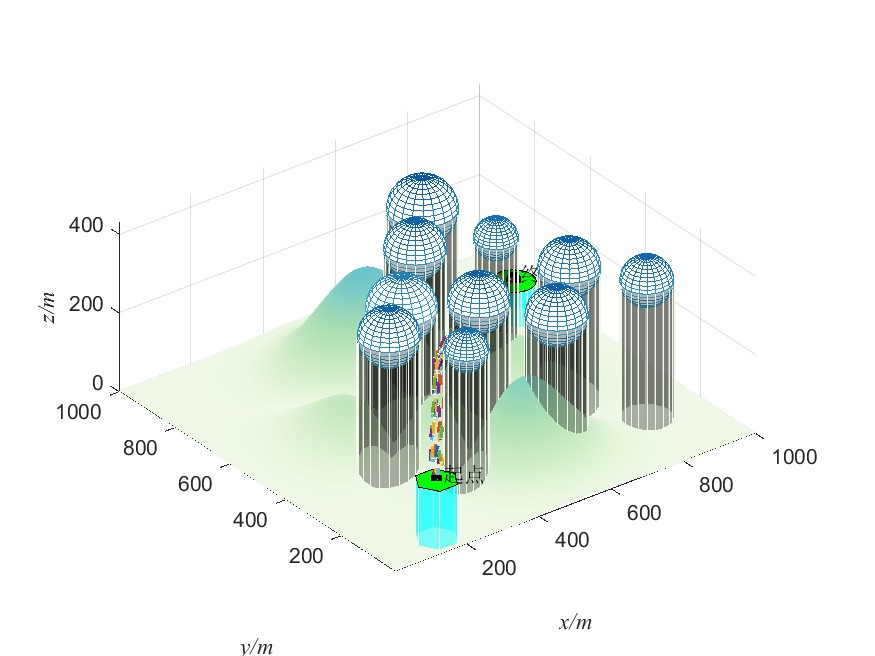
1. **Stratégie d'optimisation multi-objectifs** : dans la planification de la trajectoire des drones, plusieurs objectifs doivent être pris en compte simultanément, tels que la longueur de la trajectoire, la sécurité, le temps de vol et les contraintes dynamiques. L’optimisation de ces objectifs peut aider les drones à trouver des trajectoires optimales dans des environnements complexes.
2. **Algorithme de recherche heuristique** : des algorithmes de recherche heuristiques traditionnels, tels que l'algorithme A*, ont été utilisés pour la planification de la trajectoire des drones. Cependant, ces algorithmes peuvent être confrontés à des problèmes d’efficacité et de vitesse de convergence dans des environnements complexes.
3. **Algorithme métaheuristique** : afin de résoudre le problème d'optimisation du chemin, les chercheurs ont adopté des algorithmes heuristiques améliorés, tels que l'optimisation par essaim de particules (PSO), l'algorithme génétique (GA) et l'optimiseur de loup gris (GWO). Ces algorithmes effectuent bien dans la résolution de problèmes d’optimisation combinatoire complexes.
4. **Méthodes basées sur l'apprentissage automatique** : les méthodes d'apprentissage en profondeur et d'apprentissage par renforcement sont également appliquées à la planification de la trajectoire des drones, permettant aux drones d'apprendre à partir des données des capteurs et de s'adapter à des environnements complexes.
5. **Planification collaborative multi-agents** : Dans les systèmes multi-UAV, la planification collaborative est particulièrement importante. Cela implique l’attribution des tâches, la planification des trajectoires et la prise de décision collaborative pour garantir la coopération et le partage des ressources entre les drones.
6. **Fusion de cartes et de capteurs de haute précision** : La combinaison de données cartographiques de haute précision et de données de capteurs, telles que le GPS, le lidar et les caméras, peut améliorer la précision de la navigation des drones et s'adapter aux environnements dynamiques.
7. **Adaptabilité dynamique de l'environnement** : les algorithmes de planification de trajectoire des drones doivent avoir la capacité de percevoir et de s'adapter aux changements environnementaux en temps réel pour faire face aux changements d'obstacles dynamiques et de conditions météorologiques.
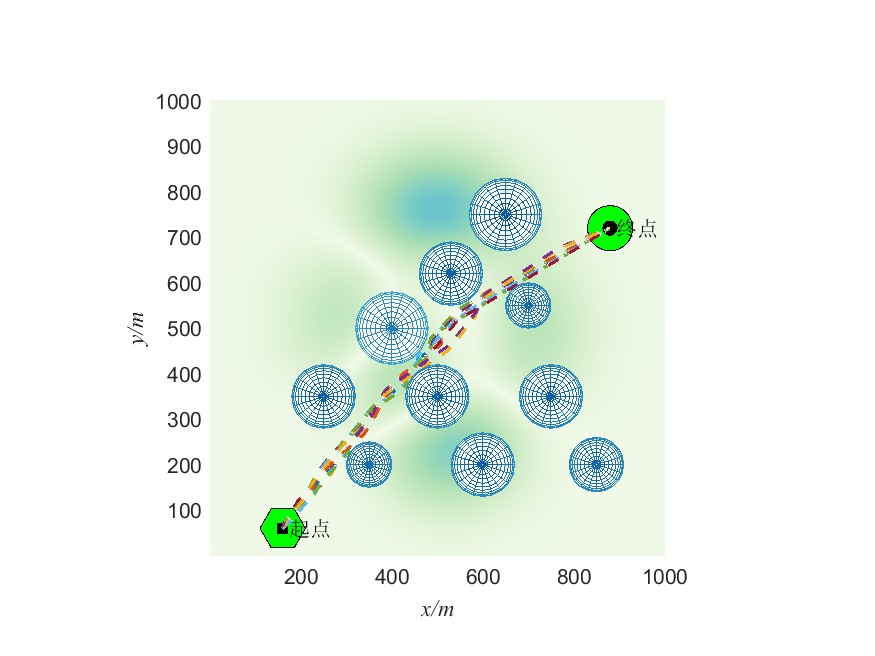
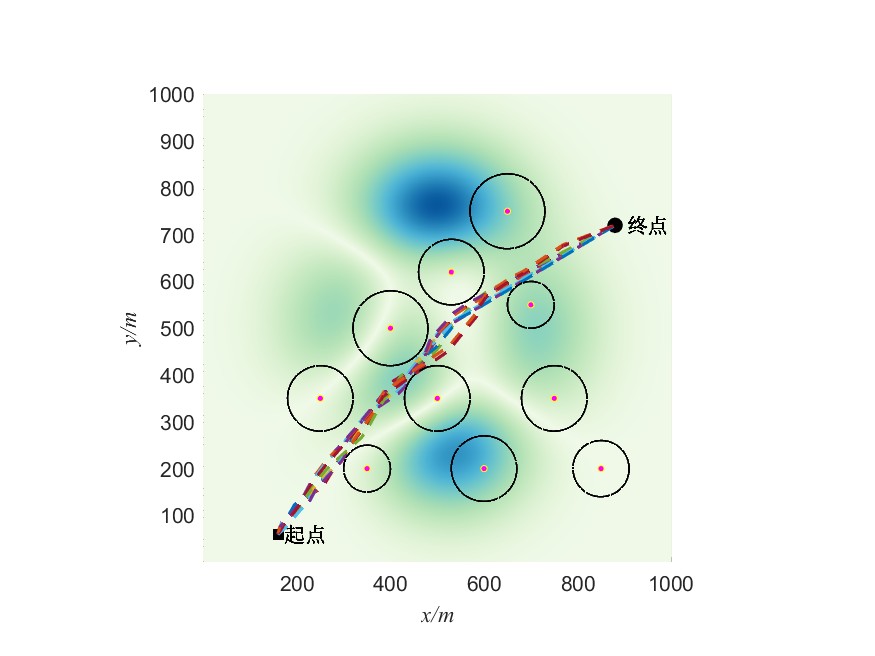
8. **Algorithme d'optimisation d'essaim de particules multi-objectif basé sur des variables de navigation (NMOPSO)** : Il s'agit d'un algorithme pour la planification de la trajectoire d'évitement d'obstacles des drones dans des environnements montagneux complexes. et trouvez des chemins sûrs et efficaces grâce à une technologie d’optimisation multi-objectifs.
9. **Stratégie d'optimisation multi-objectifs tenant compte des contraintes de sécurité des canaux de vol** : Dans des environnements complexes, tels que les mines de charbon souterraines, l'optimisation des canaux de vol sûrs et des trajectoires de vol est cruciale pour garantir la sécurité de vol des drones. L'algorithme proposé génère une trajectoire de vol avec de meilleures performances globales en ajustant le vecteur normal demi-plan dans le processus de génération d'un canal de vol sûr et en utilisant des fonctions multi-objectifs pour modéliser et optimiser les indicateurs de performance de la trajectoire du drone.
Grâce à l'application complète de ces méthodes et algorithmes, les solutions d'optimisation multi-objectifs pour la planification de trajectoire des drones peuvent améliorer l'efficience et l'efficacité de la planification de trajectoire tout en garantissant la sécurité. Les recherches futures continueront de stimuler le développement d’algorithmes permettant de s’adapter à des environnements plus complexes et dynamiques.


Il se consacre à la recherche technologique depuis plus de trente ans, maîtrise divers langages tels que java, linux, javascript, php, css, etc., et a apporté de nombreuses contributions dans le domaine de l'open source. une station de documentation pour les développeurs pour partager certains problèmes de développement technologique pour référence future.
