2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
Charta inscriptio:https://arxiv.org/pdf/2403.10506
Humanoides robots speciem habent humanam et exspectantur homines adiuvandi in variis ambitibus et operibus. Autem, odio carus et fragilis est ad hanc inquisitionem provocatio. Hoc ergo studium HumanoidBench amplificavit utens simulationis technologiae provectae. Hoc Probatio aestimat observantiam diversorum algorithmorum robotorum humanoideorum utentium, inclusa varietate officiorum, ut bimanuale sollertia et multiplex manipulatio plena corporis.Investigationes eventus ostendunt antecedenssupplementum discendi algorithmus In multis operibus nititur, dum algorithmi hierarchicae discentes melius agunt in actionibus fundamentalibus sicut ambulationes et tactus res. HumanoidBench magni momenti est instrumentum communitatis roboticae ut provocationes ad robots humanoidas spectantes compellant, praebens suggestum ad celeritatis algorithmarum et idearum confirmationem.
Robots humanoides exspectantur ut compagem in vitam nostram cotidianam integrant. Eorum autem moderatio ad operas specificas manually destinata, et nova officia ampla opera operandi requirunt. Ad hanc quaestionem appellandam, Probatio elaboravit quae vocatur HumanoidBench ad faciliorem cognitionem robotorum humanoideorum. Hoc implicat amplitudinem provocationum, inter quas implicatas potestates, coordinationem corporis et diuturnum negotium.Hoc tribunal est temptare robotdoctrina algorithmus Ambituum tutum, insumptuosus praebet et varias functiones continet ad opera humana quotidiana pertinentia. HumanoidBench facile incorporare potest varietates robotarum humanoidum et effectorum finium, 15 totius corporis machinationes operarum, et 12 munerum motivum secundum locum. Hoc dat algorithms status-of-artis RL ut complexos dynamicos robotorum humanoideorum regere et directionem praebet ad futurae investigationis.
Altum supplementum studiorum (RL) est, cum cessum simulationis benchmarks de mensuris celeriter proficit. Nihilominus, existente robot operatione simulationis ambitus maxime intendunt in artes statas, breves artes et operationes implicatas non implicant. E contra, benchmarks quae proposita sunt in variis diuturnum operationibus focus. Plurimi autem benchmarks sunt ad munia propria destinata, et multi exempla simpliciores utuntur. Hoc postulat synthetica benchmarks secundum reales odio.
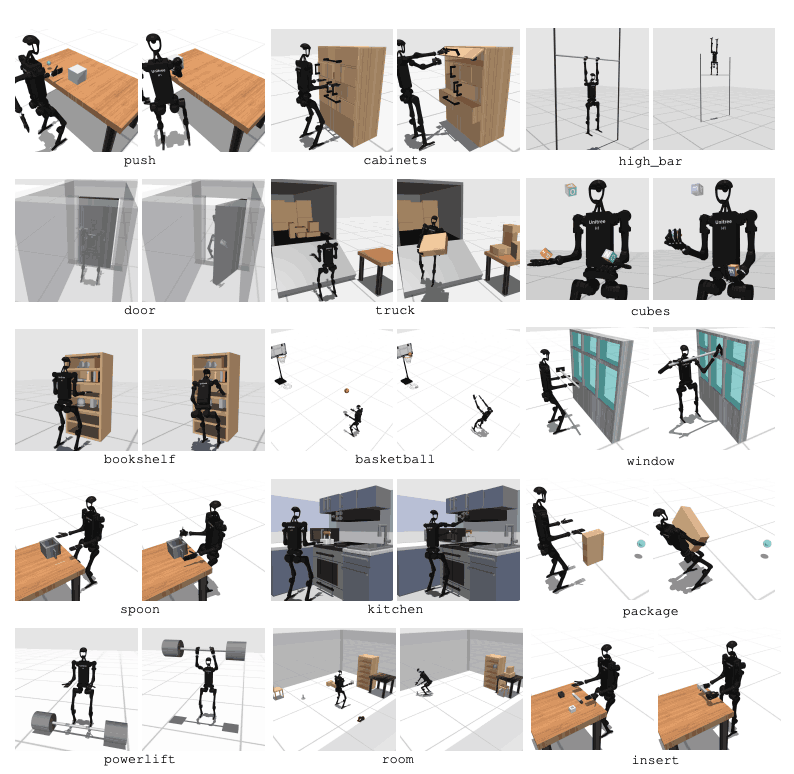
Praecipuum agens roboticum est robot Unitree H1 humanoidalis cum duabus manibus dexteris umbrae. Simulatur robot per MuJoCo. Ambitus simulata observationes varias sustinet, inclusa robot status, status obiecti, observationes visuales, et sensus tangentes plenae corporis. Robots humanoides etiam per positionem dominii temperari possunt.
Ad munera similia hominibus exercenda, robot debet suum ambitum intelligere et actiones congruas accipere. Tamen probatio robotorum in rerum natura difficile est propter sumptus et curas securitatis. Ideo ambitus simulationis instrumenta magna sunt ad robots discendi et moderandi.
HumanoidBench 27 munia includit cum spatio motus summus dimensivus (usque ad 61 actus). Motor munerum fundamentales motus includunt sicut ambulatio et cursus. Officia manipulationis includunt functiones provectas ut impellentia, trahens, elevatio et capiens.

Propositum Probationis est aestimare quomodo algorithmi moderni bene haec munera perficere possint. Robot necesse est ut statum ambitus observet et actiones congruas eligat secundum. Per munus praemium, robot optimum consilium ad munus exercendum discere potest.
Exempli gratia, in negotio ambulationis, robot debet celeritatem praemittere sine lapsu. Statera optimizing et incessus magni ponderis est in hoc genere operis. Ex altera parte, in manipulatione officiorum, robot opus habet ad res praecise manipulandas. Hoc requirit cognitionem obiecti positionis et orientationis et congruae vis temperantiae.
Propositum HumanoidBench est ut campum discendi robotici et temperantia per haec munia progrediatur. Simulatis ambitibus utentes, investigatores experimenta tuto gerere et robot observantiam in multis diversis missionibus aestimare possunt. Hoc adiuvabit ut melius algorithmarum moderatio et methodi discendi augeantur, ut futuram applicationem robotorum humanoidum in rerum natura promoveant.
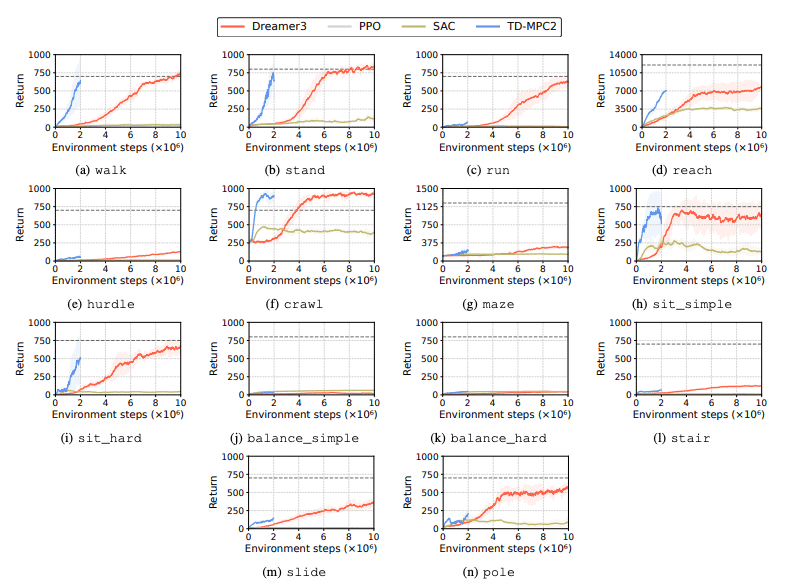
Exercitatio subsidii discendi (RL) algorithms aestimatur ad cognoscendas provocationes ab robots humanoideis in discendis operibus. Quattuor praecipua subsidia discendi methodi ad hoc adhibentur, inter DreamerV3, TD-MPC2, SAC et PPO. Proventus monstrant algorithm baseline sub limine successus in multis operibus fungi.
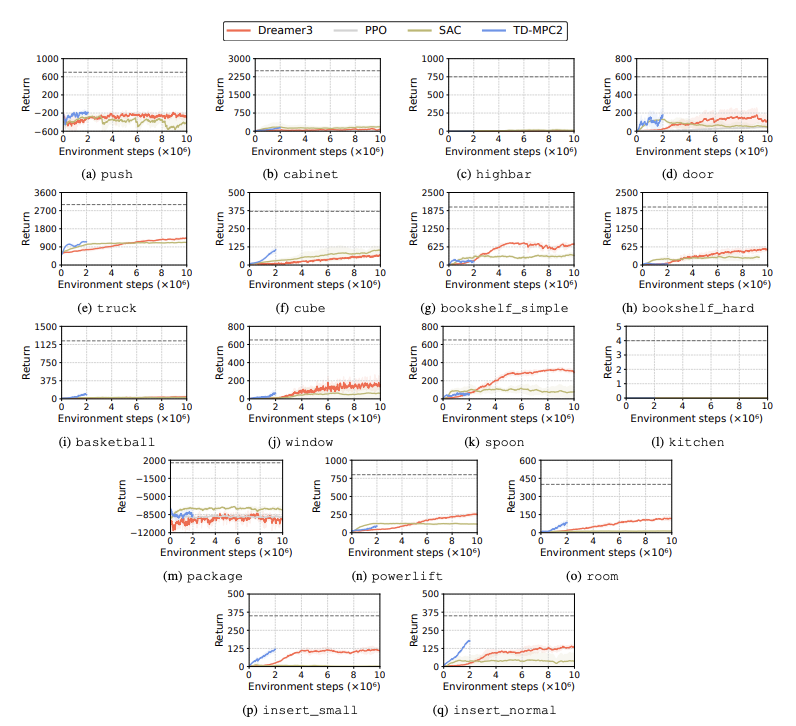
Praesertim currentes RL contendant algorithmi alta spatia actionis dimensiva et multiplicia opera tractare. Robots humanoides praecipue laborant operas faciendo quae dexteris manibus et complexu corporis coordinationem requirunt. Praeter hoc, opera manipulationis sunt etiam praecipue provocantia et saepe minora praemia habent.
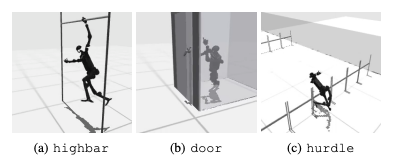
Communis defectus est quod benchmarks humanoideis nituntur ad mores robots exspectandos in operibus discendis, quales sunt crates, portae et impedimenta. Hoc est, quia difficile est invenire consilia apta ad mores complexus.
Ad has provocationes accedere hierarchicus RL consideratur. Solers instituendi humili gradu et componendo cum summus gradus consiliorum consiliorum solutionem negotium faciliorem reddere potest. Sed adhuc locus est emendationis algorithmi currentis.
Haec investigatio summus dimensiva humanoidem nomine HumanoidBench introducitrobot imperium Probatio. Hoc accumsan signum praebet comprehensivum environment humanoideum inter varios motus ac machinationes operas a nugis ad applicationes reales mundi. Auctores chartarum sperant se posse provocare talia negotia implicata et promovere algorithmatum pleni corporis pro robots humanoideis.
In studiis futuris, magni momenti erit perscrutari interactiones inter varias sensitivas modalitates. Accedit, consideratio dabitur ut obiectis et ambitus veriores componendi cum varietate reali-mundi et GENERALI reddendo. Accedit, alia emphasi erit media doctrina in ambitus induci, ubi difficile est physicas demonstrationes colligere.

technologiae technologiae plus quam 30 annos operam dedit et in variis linguis proficit ut java, linux, javascript, php, css, etc. Multas contributiones in aperto fonte campo fecit elit documentorum statione ad communicandas quaestiones in technologia progressus ad futuram referentiam
