2024-07-12
한어Русский языкEnglishFrançaisIndonesianSanskrit日本語DeutschPortuguêsΕλληνικάespañolItalianoSuomalainenLatina
कागजस्य सम्बोधनम् : १.https://arxiv.org/pdf/2403.10506 इति ग्रन्थः
मानवरूपी रोबोट्-इत्यस्य स्वरूपं मानवसदृशं भवति, ते च विविधवातावरणेषु कार्येषु च मनुष्याणां समर्थनं कुर्वन्ति इति अपेक्षा अस्ति । परन्तु महत्, भंगुरं च हार्डवेयरम् अस्य शोधस्य कृते एकं आव्हानं वर्तते । अतः अस्मिन् अध्ययने उन्नत-अनुकरण-प्रौद्योगिक्याः उपयोगेन HumanoidBench इत्यस्य विकासः कृतः । एषः बेन्चमार्कः मानवरूपी रोबोट्-इत्यस्य उपयोगेन भिन्न-भिन्न-एल्गोरिदम्-प्रदर्शनस्य मूल्याङ्कनं करोति, यत्र निपुणद्विहस्त-जटिल-पूर्णशरीर-हेरफेरम् इत्यादीनि विविधानि कार्याणि सन्तिशोधपरिणामेषु ज्ञायते यत् अत्यन्तं उन्नताः...सुदृढीकरण शिक्षण एल्गोरिदम इदं बहुषु कार्येषु संघर्षं करोति, यदा तु श्रेणीबद्धशिक्षण-अल्गोरिदम्स् गमनम्, वस्तुनां स्पर्शनम् इत्यादिषु मूलभूतक्रियासु उत्तमं प्रदर्शनं कुर्वन्ति । HumanoidBench इति रोबोटिक्ससमुदायस्य कृते मानवरूपी रोबोट्-सम्बद्धानां चुनौतीनां निवारणाय महत्त्वपूर्णं साधनं भवति, यत् एल्गोरिदम्-विचारयोः द्रुत-सत्यापनार्थं मञ्चं प्रदाति
मानवरूपिणः रोबोट् अस्माकं दैनन्दिनजीवने निर्विघ्नतया एकीकृताः भविष्यन्ति इति अपेक्षा अस्ति। परन्तु तेषां नियन्त्रणानि विशिष्टकार्यस्य कृते हस्तचलितरूपेण निर्मिताः भवन्ति, नूतनकार्यस्य कृते विस्तृतं अभियांत्रिकीकार्यस्य आवश्यकता भवति । एतस्याः समस्यायाः निवारणाय वयं HumanoidBench इति एकं बेन्चमार्कं विकसितवन्तः यत् मानवरूपस्य रोबोट्-शिक्षणस्य सुविधा भवति । अस्मिन् जटिलनियन्त्रणानि, शारीरिकसमन्वयः, दीर्घकालीनकार्यं च इत्यादीनां आव्हानानां श्रेणी भवति ।अयं मञ्चः परीक्षणरोबोट् अस्तिशिक्षण एल्गोरिदम सुरक्षितं, सस्तो वातावरणं प्रदाति तथा च दैनन्दिनमानवकार्यसम्बद्धानि विविधानि कार्याणि समाविष्टानि सन्ति । HumanoidBench इत्यनेन सहजतया विविधाः मानवरूपिणः रोबोट् तथा अन्त्यप्रभावकाः, १५ सम्पूर्णशरीरस्य हेरफेरकार्यं, १२ गतिकार्यं च समावेशयितुं शक्यते । एतेन अत्याधुनिकाः आर एल एल्गोरिदम्स् मानवरूपी रोबोट् इत्यस्य जटिलगतिशीलतां नियन्त्रयितुं समर्थाः भवन्ति तथा च भविष्यस्य अनुसन्धानस्य दिशां प्रदाति ।
मानकीकृत-अनुकरण-मापदण्डानां उद्भवेन सह गहन-सुदृढीकरण-शिक्षणं (RL) तीव्रगत्या उन्नतिं कुर्वन् अस्ति । परन्तु विद्यमानाः रोबोट्-सञ्चालन-अनुकरण-वातावरणाः मुख्यतया स्थिर-अल्पकालिक-कौशलेषु केन्द्रीभवन्ति, तेषु जटिल-सञ्चालनानि न सन्ति । तस्य विपरीतम् ये मापदण्डाः प्रस्ताविताः सन्ति ते विविधदीर्घकालीनसञ्चालनेषु केन्द्रीभवन्ति । परन्तु अधिकांशः मानदण्डः विशिष्टकार्यस्य कृते निर्मितः भवति, बहवः सरलीकृतप्रतिमानानाम् उपयोगं कुर्वन्ति । एतदर्थं वास्तविकहार्डवेयर आधारितं कृत्रिममापदण्डानां आवश्यकता भवति ।
मुख्यः रोबोट् एजेण्टः Unitree H1 मानवरूपः रोबोट् अस्ति यस्य द्वौ निपुणछायाहस्तौ2 । रोबोट् इत्यस्य अनुकरणं MuJoCo इत्यस्य माध्यमेन भवति । अनुकरणीयवातावरणं रोबोट्-स्थितिः, वस्तु-स्थितिः, दृश्य-निरीक्षणं, पूर्णशरीर-स्पर्श-संवेदनं च इत्यादीनां अवलोकनानाम् एकां श्रेणीं समर्थयति । मानवरूपिणः रोबोट्-इत्यस्य नियन्त्रणं स्थाननियन्त्रणद्वारा अपि कर्तुं शक्यते ।
मनुष्याणां सदृशानि कार्याणि कर्तुं रोबोट् स्वस्य परिवेशं अवगन्तुं समुचितं कार्यं कर्तुं च समर्थः भवितुमर्हति । परन्तु वास्तविकजगति रोबोट्-परीक्षणं व्ययस्य, सुरक्षायाः च चिन्तायाः कारणात् कठिनम् अस्ति । अतः अनुकरणवातावरणानि रोबोट्-शिक्षणाय, नियन्त्रणाय च महत्त्वपूर्णानि साधनानि सन्ति ।
HumanoidBench इत्यस्मिन् उच्च-आयामी-गति-स्थानं (61 एक्ट्यूएटर् पर्यन्तं) सह 27 कार्याणि समाविष्टानि सन्ति । मोटरकार्येषु चलनम्, धावनम् इत्यादीनि मूलभूतगतिः अन्तर्भवति । हेरफेरकार्यं वस्तुषु धक्कायितुं, आकर्षयितुं, उत्थापनं, ग्रहणं च इत्यादीनि उन्नतानि कार्याणि सन्ति ।

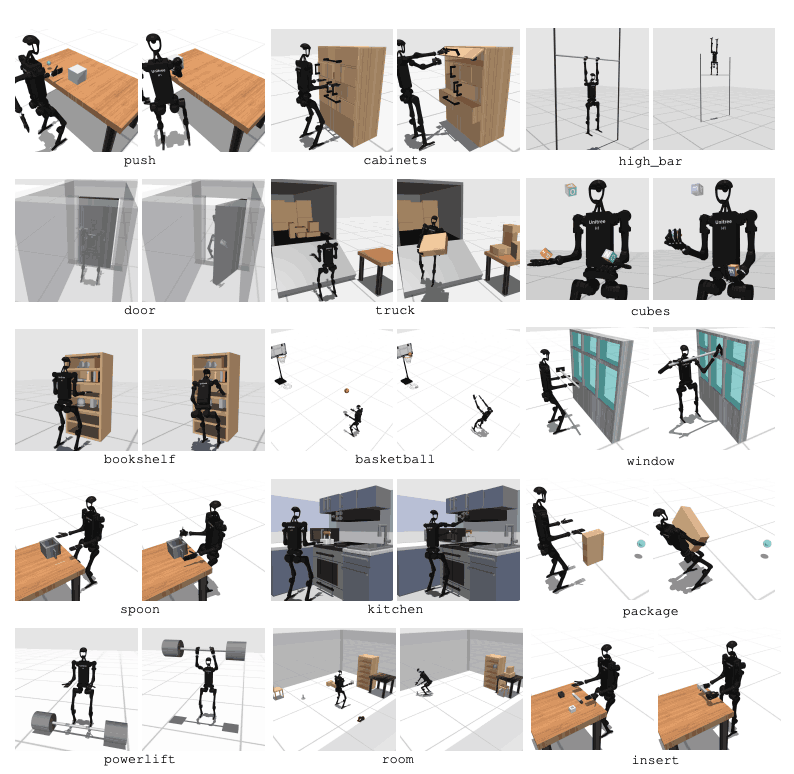
आधुनिक-अल्गोरिदम्-इत्यनेन एतानि कार्याणि कियत् सम्यक् सम्पादयितुं शक्यन्ते इति मूल्याङ्कनं करणीयम् इति बेन्चमार्कस्य उद्देश्यम् । रोबोट् इत्यस्य पर्यावरणस्य स्थितिं अवलोक्य तदनुसारं समुचितक्रियाः चयनं करणीयम् । पुरस्कारकार्यस्य माध्यमेन रोबोट् कार्यं कर्तुं उत्तमं रणनीतिं ज्ञातुं शक्नोति ।
यथा - पादचालनकार्य्ये रोबोट् इत्यस्य अग्रे वेगं न पतति । अस्मिन् प्रकारे कार्ये संतुलनस्य, चालनस्य च अनुकूलनं अतीव महत्त्वपूर्णम् अस्ति । अपरं तु हेरफेरकार्येषु रोबोट् इत्यनेन वस्तुषु सटीकरूपेण परिवर्तनस्य आवश्यकता भवति । अस्य कृते वस्तुनः स्थानस्य अभिमुखीकरणस्य च ज्ञानं, समुचितं बलनियन्त्रणं च आवश्यकम् ।
एतेषां कार्याणां माध्यमेन रोबोट्-शिक्षणस्य नियन्त्रणस्य च क्षेत्रं उन्नतयितुं HumanoidBench इत्यस्य लक्ष्यम् अस्ति । अनुकरणीयवातावरणानां उपयोगेन शोधकर्तारः सुरक्षितरूपेण प्रयोगान् कर्तुं शक्नुवन्ति, अनेकेषु भिन्नपरिदृश्येषु रोबोट्-प्रदर्शनस्य मूल्याङ्कनं च कर्तुं शक्नुवन्ति । एतेन उत्तमनियन्त्रण-एल्गोरिदम्-शिक्षण-विधि-विकासे सहायता भविष्यति, येन वास्तविकजगति मानवरूपी-रोबोट्-इत्यस्य भावि-अनुप्रयोगस्य प्रचारः भविष्यति ।
सुदृढीकरणशिक्षणस्य (RL) एल्गोरिदमस्य कार्यप्रदर्शनस्य मूल्याङ्कनं भवति यत् शिक्षणकार्य्येषु मानवरूपेषु रोबोट्-सम्बद्धानां चुनौतीनां पहिचानः भवति । अस्य कृते चत्वारि मुख्यानि सुदृढीकरणशिक्षणविधयः उपयुज्यन्ते, यत्र DreamerV3, TD-MPC2, SAC, PPO च सन्ति । परिणामानि दर्शयन्ति यत् आधाररेखा-एल्गोरिदम् अनेकेषु कार्येषु सफलता-सीमायाः अधः कार्यं करोति ।
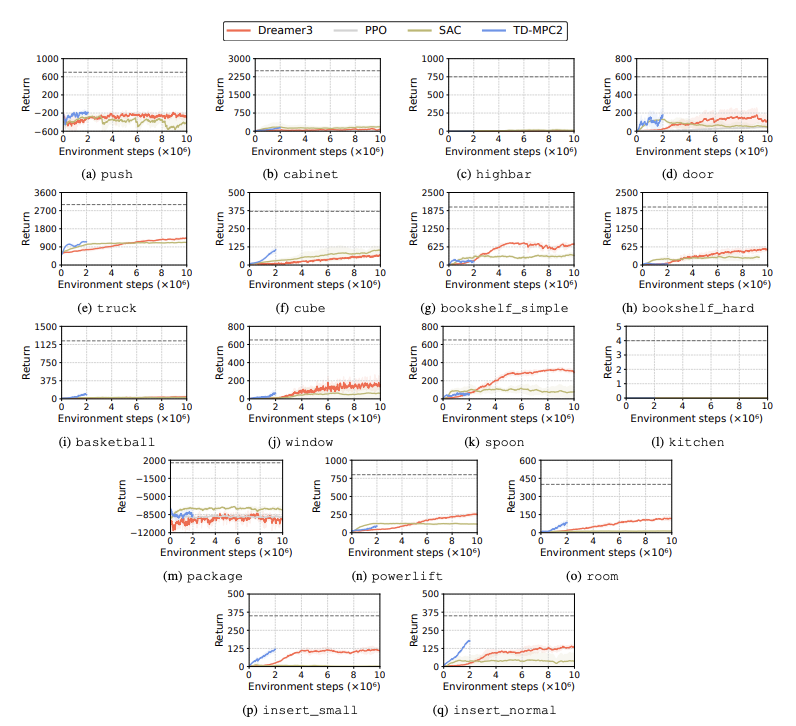
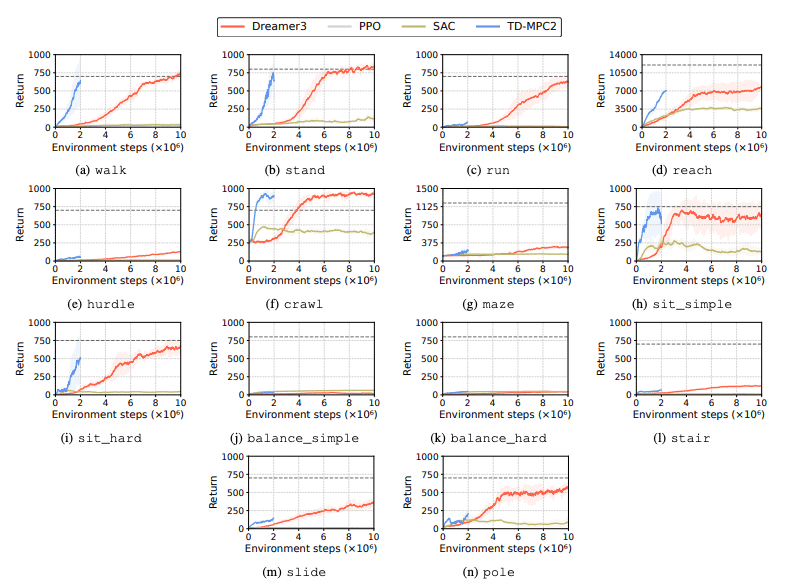
विशेषतः वर्तमान RL एल्गोरिदम् उच्च-आयामी क्रियास्थानानि जटिलकार्यं च नियन्त्रयितुं संघर्षं कुर्वन्ति । विशेषतः मानवरूपिणः रोबोट्-इत्यस्य कार्याणि कर्तुं कष्टं भवति येषु निपुणहस्तानां जटिलशरीरसमन्वयस्य च आवश्यकता भवति । अस्य अतिरिक्तं हेरफेरकार्यं अपि विशेषतया आव्हानात्मकं भवति, प्रायः तेषां फलं न्यूनं भवति ।
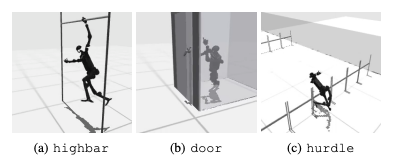
एकः सामान्यः असफलता अस्ति यत् मानवरूपाः मापदण्डाः उच्चबाधा, द्वारं, बाधा इत्यादिषु कार्येषु रोबोट्-इत्यस्य अपेक्षितव्यवहारं ज्ञातुं संघर्षं कुर्वन्ति यतो हि जटिलव्यवहारानाम् अनुरूपाः रणनीतयः कठिनाः भवन्ति ।
एतासां आव्हानानां निवारणाय श्रेणीबद्धः आर एल-पद्धतिः विचार्यते । निम्नस्तरीयकौशलस्य प्रशिक्षणं उच्चस्तरीयनियोजनरणनीतिभिः सह संयोजनेन कार्यसमाधानस्य सुविधा भवितुम् अर्हति। परन्तु वर्तमानस्य अल्गोरिदम् इत्यस्मिन् अद्यापि सुधारस्य स्थानं वर्तते ।
अस्मिन् शोधकार्य्ये HumanoidBench इति उच्च-आयामी मानवरूपस्य परिचयः भवतिरोबोट् नियन्त्रणम् बेन्चमार्क। इदं बेन्चमार्कं खिलौनाभ्यः आरभ्य वास्तविक-दुनिया-अनुप्रयोगपर्यन्तं विविधानि गतिशीलता-हेरफेर-कार्यं सहितं व्यापकं मानवरूपं वातावरणं प्रदाति पत्रस्य लेखकाः आशान्ति यत् एतत् एतादृशान् जटिलकार्यं चुनौतीं दातुं शक्नोति तथा च मानवरूपी रोबोट् कृते पूर्णशरीरस्य एल्गोरिदम् इत्यस्य विकासं प्रवर्धयितुं शक्नोति।
भविष्ये अध्ययनेषु भिन्न-भिन्न-संवेदन-विधिनाम् अन्तरक्रियाणां अध्ययनं महत्त्वपूर्णं भविष्यति । तदतिरिक्तं, अधिकवास्तविकवस्तूनाम् वातावरणानां च संयोजनं वास्तविक-विविधतायाः उच्चगुणवत्तायुक्तस्य च प्रतिपादनेन सह विचारः भविष्यति । तदतिरिक्तं यत्र भौतिकप्रदर्शनानां संग्रहणं कठिनं भवति तत्र शिक्षणं प्रेरयितुं अन्यसाधनानाम् उपरि बलं भविष्यति।

सः ३० वर्षाणाम् अधिकं कालात् प्रौद्योगिक्याः शोधकार्यं कर्तुं समर्पितः अस्ति, तथा च जावा, लिनक्स, जावास्क्रिप्ट्, php, css इत्यादिषु विविधभाषासु प्रवीणः अस्ति, मुक्तस्रोतक्षेत्रे सः बहु योगदानं कृतवान् अस्ति विकासक दस्तावेजीकरणस्थानकं भविष्ये सन्दर्भार्थं प्रौद्योगिकीविकासे केचन विषयाः साझां कर्तुं सर्वे तत् पश्यन्तु
